《传感器原理与传感器技术》课后答案.docx
《《传感器原理与传感器技术》课后答案.docx》由会员分享,可在线阅读,更多相关《《传感器原理与传感器技术》课后答案.docx(34页珍藏版)》请在冰点文库上搜索。
《传感器原理与传感器技术》课后答案
第1章传感器与检测技术基础思考题答案
I.检测系统由哪几部分组成?
说明各部分的作用。
答:
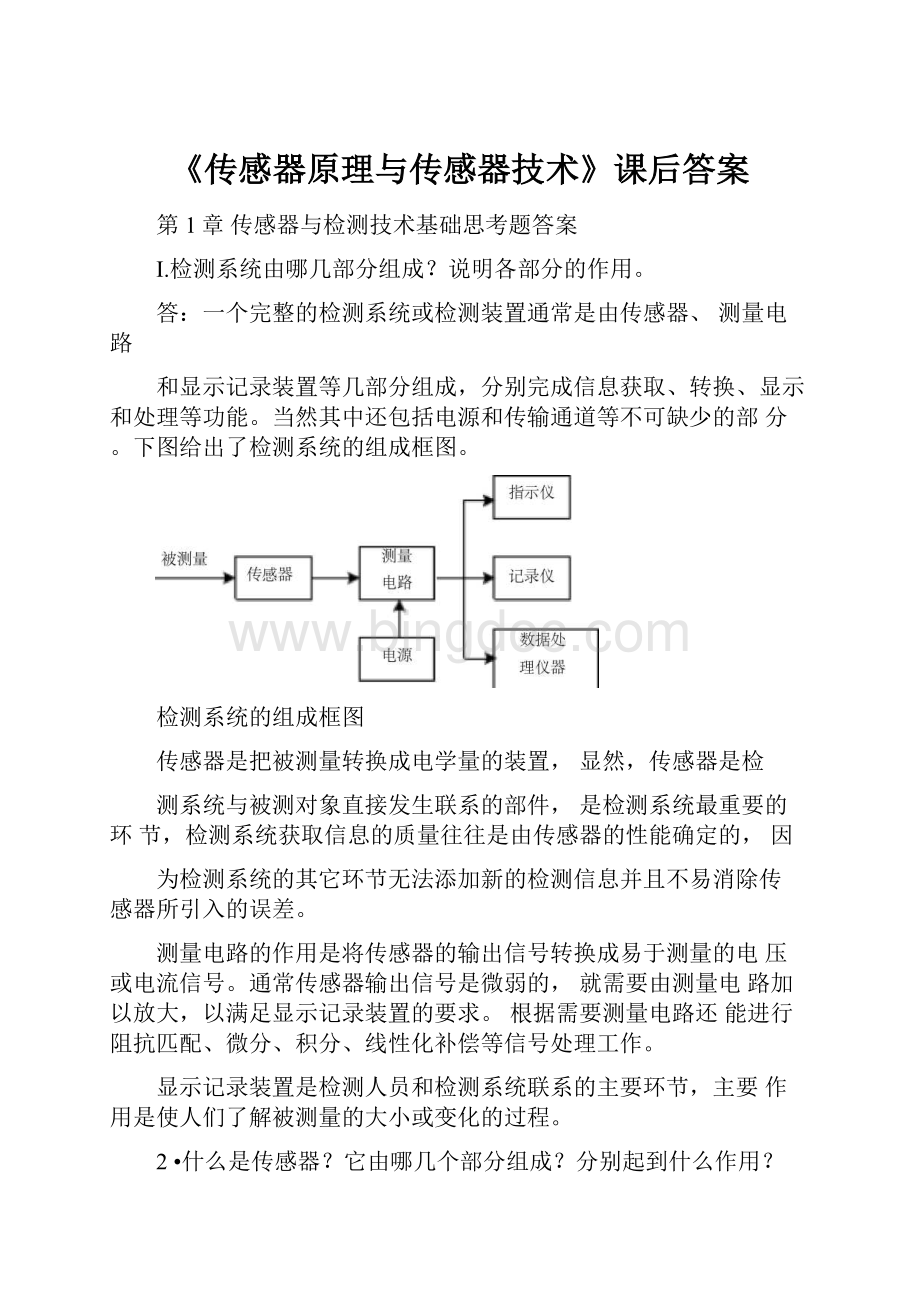
一个完整的检测系统或检测装置通常是由传感器、测量电路
和显示记录装置等几部分组成,分别完成信息获取、转换、显示和处理等功能。
当然其中还包括电源和传输通道等不可缺少的部分。
下图给出了检测系统的组成框图。
检测系统的组成框图
传感器是把被测量转换成电学量的装置,显然,传感器是检
测系统与被测对象直接发生联系的部件,是检测系统最重要的环节,检测系统获取信息的质量往往是由传感器的性能确定的,因
为检测系统的其它环节无法添加新的检测信息并且不易消除传感器所引入的误差。
测量电路的作用是将传感器的输出信号转换成易于测量的电压或电流信号。
通常传感器输出信号是微弱的,就需要由测量电路加以放大,以满足显示记录装置的要求。
根据需要测量电路还能进行阻抗匹配、微分、积分、线性化补偿等信号处理工作。
显示记录装置是检测人员和检测系统联系的主要环节,主要作用是使人们了解被测量的大小或变化的过程。
2•什么是传感器?
它由哪几个部分组成?
分别起到什么作用?
解:
传感器是一种以一定的精确度把被测量转换为与之有确定对应关系的、便于应用的某种
物理量的测量装置,能完成检测任务;传感器由敏感元件,转换元件,转换电路组成。
敏感元件是直接感受被测量,并输出与被测量成确定关系的物理量;转换元件把敏感元件的输出
作为它的输入,转换成电路参量;上述电路参数接入基本转换电路,便可转换成电量输出。
3•传感器技术的发展动向表现在哪几个方面?
解:
(1)开发新的敏感、传感材料:
在发现力、热、光、磁、气体等物理量都会使半导体硅材料的性能改变,从而制成力敏、热敏、光敏、磁敏和气敏等敏感元件后,寻找发现具有新原理、新效应的敏感元件和传感元件。
(2)开发研制新型传感器及组成新型测试系统
1MEMS技术要求研制微型传感器。
如用于微型侦察机的CCD传感器、用于管道爬
壁机器人的力敏、视觉传感器。
2研制仿生传感器
3研制海洋探测用传感器
4研制成分分析用传感器
5研制微弱信号检测传感器
(3)研究新一代的智能化传感器及测试系统:
如电子血压计,智能水、电、煤气、热量
表。
它们的特点是传感器与微型计算机有机结合,构成智能传感器。
系统功能最大程度地用
软件实现。
(4)传感器发展集成化:
固体功能材料的进一步开发和集成技术的不断发展,为传感器集成化开辟了广阔的前景。
(5)多功能与多参数传感器的研究:
如同时检测压力、温度和液位的传感器已逐步走向市场。
4•传感器的性能参数反映了传感器的什么关系?
静态参数有哪些?
解:
在生产过程和科学实验中,要对各种各样的参数进行检测和控制,就要求传感器能感受
被测非电量的变化并将其不失真地变换成相应的电量,这取决于传感器的基本特性,即输出
—输入特性。
衡量静态特性的重要指标是线性度、灵敏度,迟滞和重复性等。
5.某位移传感器,在输入量变化5mm时,输出电压变化为300mV,求其灵敏度。
U30010“
解:
其灵敏度k—=60
△X5"0
6.某线性位移测量仪,当被测位移由4.5mm变到5・0mm时,位
移测量仪的输出电压由
3.5V减至2.5V,求该仪器的灵敏度。
解:
该仪器的灵敏度为
s=2.5_3.5=_2mV/mm
5.0-4.5
7.
0.45Q「C
0.02WQ
100(放大倍数)
0.2cm/V
某测温系统由以下四个环节组成,各自的灵敏度如下
铂电阻温度传感器:
电桥:
放大器:
笔式记录仪:
求:
(1)测温系统的总灵敏度;
(2)记录仪笔尖位移4cm时,所对应的温度变化值。
解:
(1)测温系统的总灵敏度为
S=0.450.021000.2=0.18cm/C
(2)记录仪笔尖位移4cm时,所对应的温度变化值为
t422.22C
0.18
8.有三台测温仪表,量程均为0~800C,精度等级分别为2.5级、
2.0级和1.5级,现要测量500C的温度,要求相对误差不超过
2.5%,选那台仪表合理?
解:
2.5级时的最大绝对误差值为20C,测量500C时的相对误差为4%;2.0级时的最大绝对误差值为16C,测量500C时的相对误差为3.2%;1.5级时的最大绝对误差值为12C,测量
500C时的相对误差为2.4%。
因此,应该选用1.5级的测温仪器。
9.什么是系统误差和随机误差?
正确度和精密度的含义是什么?
它们各反映何种误差?
答:
系统误差是指在相同的条件下,多次重复测量同一量时,误差的大小和符号保持不变,或按照一定的规律变化的误差。
随机误差则是指在相同条件下,多次测量同一量时,其误差的大小和符号以不可预见的方式变化的误差。
正确度是指测量结果与理论真值的一致程度,它反映了系统误差的大小,精密度是指测量结果的分散程度,它反映了随机误差的大小。
10.试分析电压输出型直流电桥的输入与输出关系。
答:
如图所示,电桥各臂的电阻分别为R1、R2、R3、R4。
U
为电桥的直流电源电压。
当四臂电阻R1=R2=R3=R4=R时,称为等臂电桥;当R〔=R2=R,R3=R4=R(RMR)时,称为输出对称电桥;当R1=R4=R,R2=R3=R(RMR)时,称为电源对称电桥。
直流电桥电路
当电桥输出端接有放大器时,由于放大器的输入阻抗很高,
所以可以认为电桥的负载电阻为无穷大,这时电桥以电压的形式
输出。
输出电压即为电桥输出端的开路电压,其表达式为
R1R3_R2R43
Uo3U
(Ri+R2XR3+R4)
(1)
设电桥为单臂工作状态,即Ri为应变片,其余桥臂均为固定电阻。
当Ri感受被测量产生电阻增量ARi时,由初始平衡条件
RiR3=R2R4得乞=电,代入式(i),则电桥由于ARi产生不平衡
&
引起的输出电压为
R2
R2RiU
R-iR2
U02
(R+R2)2
对于输出对称电桥,此时Ri=R2=R,R3=R4=R,当Ri臂的电阻产生变化ARi=AR,根据
(2)可得到输出电压为
(3)
(RiR2)2(Ri)
Uo二U(当(空)
(RR)R4R
对于电源对称电桥,Ri=R4=R,R2=R3=R
量ARi=AR时,由式
(2)得
Uoi-^(塑)
(R+R)2R
当Ri臂产生电阻增
对于等臂电桥Ri=R2=R3=R4=R,当Ri的电阻增量ARi=AR时,由式
(2)可得输出电压为
RRARU也R
Uo二U=U(»)
(RR)R4R
(5)
由上面三种结果可以看出,当桥臂应变片的电阻发生变化时,电桥的输出电压也随着变化。
当ARvvR时,电桥的输出电压与
应变成线性关系。
还可以看出在桥臂电阻产生相同变化的情况下,等臂电桥以及输出对称电桥的输出电压要比电源对称电桥的
输出电压大,即它们的灵敏度要高。
因此在使用中多采用等臂电桥或输出对称电桥。
在实际使用中为了进一步提高灵敏度,常采用等臂电桥,四个被测信号接成两个差动对称的全桥工作形式,Ri=R+AR,R2=R-AR,R3=R+AR,R4=R-ar,将上述条件代入式⑴得迥(6)
0〔4IR丿」IR丿')
由式⑹看出,由于充分利用了双差动作用,它的输出电压为单臂工作时的4倍,所以大大提高了测量的灵敏度。
11.•用测量范围为-50〜150KPa的压力传感器测量140KPa压力时,传感器测得示值为
142KPa,求该示值的绝对误差、实际相对误差、标称相对误差和引用误差。
解:
绝对误差:
厶=X-L=142-140=2
A2
相对误差、,一100%=100%=1.4285%
L140
标称相对误差即二二100%=-?
100%=1.4084%
x142
引用误差
测量范围上限-测量范围下限
22
100%=100%=1%
150-(-50)200
第2章电阻式传感器思考题答案
1.金属电阻应变片与半导体材料的电阻应变效应有什么不同答:
金属电阻的应变效应主要是由于其几何形状的变化而产生的,半导体材料的应变效应则主要取决于材料的电阻率随应变所引起的变化产生的。
2.直流测量电桥和交流测量电桥有什么区别?
答:
它们的区别主要是直流电桥用直流电源,只适用于直流元件,
交流电桥用交流电源,适用于所有电路元件。
3.热电阻测量时采用何种测量电路?
为什么要采用这种测量电路?
说明这种电路的工作原理。
答:
通常采用电桥电路作为测量电路。
为了克服环境温度的影响
常采用下图所示的三导线四分之一电桥电路。
由于采用这种电
路,热电阻的两根引线的电阻值被分配在两个相邻的桥臂中,女口
果R;二R;,则由于环境温度变化引起的引线电阻值变化造成的误差被相互抵消。
4.采用阻值为120Q灵敏度系数K=2.0的金属电阻应变片和阻值
为120Q的固定电阻组成电桥,供桥电压为4V,并假定负载电
阻无穷大。
当应变片上的应变分别为1和1000时,试求单臂、
双臂和全桥工作时的输出电压,并比较三种情况下的灵敏度。
Uo
所以应变为
Uo=壮=42忻=210』/V,应变为1000时应为
44
U0=K^=4210^=210^/V;双臂时U。
=上匕,所以应变为1
442
时u0二住二42倍=410》/V,应变为1000时应为
22
U。
二耳=4210"=410'/V;全桥时U。
=KU,所以应变为1
22
时U。
=810^/V,应变为1000时应为u°=810^/V。
从上面的计算可知:
单臂时灵敏度最低,双臂时为其两倍,全桥时最高,为单臂的四倍。
5.采用阻值R=120Q灵敏度系数K=2.0的金属电阻应变片与阻值
R=120Q的固定电阻组成电桥,供桥电压为10V。
当应变片应变为1000时,若要使输出电压大于10mV,则可采用何种工作方式(设输出阻抗为无穷大)?
解:
由于不知是何种工作方式,可设为n故可得:
得n要小于2,故应采用全桥工作方式。
6.如图所示为一直流电桥,供电电源电动势E=3V,Rs=R4=100
Q,R1和R2为同型号的电阻应变片,其电阻均为50Q,灵敏度
系数K=2.0。
两只应变片分别粘贴于等强度梁同一截面的正反两面。
设等强度梁在受力后产生的应变为5000,试求此时电桥输
出端电压U0
解:
此电桥为输出对称电桥,故"号二匕^旳讪7.光敏电阻有哪些重要特性,在工业应用中是如何发挥这些特性
的?
答:
光敏电阻是采用半导体材料制作,利用内光电效应工作的光
电元件。
它的重要特性是在无光照时阻值非常大,相当于断路,有光照时阻值变得很小,相当于通路。
在工业应用中主要就是通过光的变化来各种电路的控制。
8.应变片产生温度误差的原因及减小或补偿温度误差的方法是什么?
解:
电阻应变片产生温度误差的原因:
当测量现场环境温度变化时,由于敏感栅温度系数及
栅丝与试件膨胀系数之差异性而给测量带来了附加误差。
电阻应变片的温度补偿方法:
通常有线路补偿法和应变片自补偿两大类。
1)电桥补偿是最常用的且效果较好的线路补偿法。
电桥补偿法简单易行,而且能在较大的温度范围内补偿,但上面的四个条件不一满足,尤其是两个应变片很难处于同一温度场。
2)应变片的自补偿法是利用自身具有温度补偿作用的应变片。
9.如系题图1-1所示为等强度梁测力系统,Ri为电阻应变片,应变片灵敏度系数k=2.05,未受应变时Ri=120,|,当试件受力F时,应变片承受平均应变
3V,求电桥
(1)应变片电阻变化量R1和电阻相对变化量.迟/R。
(2)将电阻应变片置于单臂测量电桥,电桥电源电压为直流
输出电压是多少。
ER1R4
(R^R1R2HRR4)
-E
旦二區,则上式可写为:
R2R4
设桥臂比n=R_,分母中卞/R可忽略,并考虑到平衡条件
Uo一£(1.门)2R1
=3、1.6410“
(1n)2
on
=4.9210^-
10.单臂电桥存在非线性误差,试说明解决方法。
解:
为了减小和克服非线性误差,常采用差动电桥在试件上安装两个工作应变片,一个受拉
应变,一个受压应变,接入电桥相邻桥臂,称为半桥差动电路,由教材中的式(2-42)可知,Uo与厶Ri/Ri呈线性关系,差动电桥无非线性误差,而且电桥电压灵敏度Kv=E/2,比单臂工
作时提高一倍,同时还具有温度补偿作用。
第3章电容式传感器思考题答案
1.试分析变面积式电容传感器和变间隙式电容的灵敏度?
为了提
高传感器的灵敏度可采取什么措施并应注意什么问题?
答:
如图所示是一直线位移型电容式传感器的示意图。
当动极板移动△x后,覆盖面积就发生变化,电容量也随之改变,其值为
(1)
C=b(a-△x)/d=Co-b•△x/d
电容因位移而产生的变化量为
C=C—Cobx=—Co立
da
其灵敏度为
可见增加b或减小d均可提高传感器的灵敏度。
直线位移型电容式传感器
2.为什么说变间隙型电容传感器特性是非线性的?
采取什么措施
可改善其非线性特征?
答:
下图为变间隙式电容传感器的原理图。
图中1为固定极板,
2为与被测对象相连的活动极板。
当活动极板因被测参数的改变
而引起移动时,两极板间的距离d发生变化,从而改变了两极板之间的电容量Co
.I
+X
v
1-固定极板2-活动极板
设极板面积为A,其静态电容量为c
=A,当活动极板移动x
d
后,其电容量为
1+xC=d—Cod2
d
J
(1)
当x<2
J
:
1则C二Co(「-)
d
(2)
由式
(1)可以看出电容量C与x不是线性关系,只有当xvvd
时,才可认为是最近似线形关系。
同时还可以看出,要提高灵敏
度,应减小起始间隙d过小时。
但当d过小时,又容易引起击穿,
同时加工精度要求也高了。
为此,一般是在极板间放置云母、塑料膜等介电常数高的物质来改善这种情况。
在实际应用中,为了
提高灵敏度,减小非线性,可采用差动式结构。
3.有一平面直线位移差动传感器特性其测量电路采用变压器交
流电桥,结构组成如图所示。
电容传感器起始时b1=b2=b=200mm,ai=a2=20mn极距d=2mm,极间介质为空气,测量电路Uq=3sinotV,且u=u0。
试求当动极板上输入一位移量△x=5mm时,电桥输出电压u0o
4.变间隙电容传感器的测量电路为运算放大器电路,如图所示
C°=200pF,传感器的起始电容量Cxo=2OpF,定动极板距离
do=1・5mm,运算放大器为理想放大器(即Kfs,乙),Rf极大,
输入电压ui=5sindtV。
求当电容传感动极板上输入一位移量厶
x=0・15mm使do减小时,电路输出电压u°为多少?
解:
由测量电路可得
do-:
x1.5-O.15
5.如图3-22所示正方形平板电容器,极板长度a=4cm,极板间距离8=0.2mm.若用此变面积型传感器测量位移x,试计算该传感器的灵敏度并画出传感器的特性曲线.极板间介质为空气,;。
=8.85io-12F/m。
解:
这是个变面积型电容传感器,共有4个小电容并联组成。
虫=41610‘8.8510」,28.32/pFd2x10」
.^Cx-C04;0ax)
6.某电容传感器(平行极板电容器)的圆形极板半径r=4(mm),工作初始极板间距离
-0=0.3(mm),介质为空气。
问:
(1)如果极板间距离变化量=1(Jm),电容的变化量lC是多少?
(2)如果测量电路的灵敏度k1=100(mVpF),读数仪表的灵敏度k2=5(格/mV)在
■-1(」m)时,读数仪表的变化量为多少?
;S一S「d,其中S-:
r2
ddd-d
7.简述电容式传感器的优缺点。
解:
优点:
(1)温度稳定性好
(2)结构简单(3)动态响应好(4)可以实现非接触测量,具有平均效应
缺点:
(1)输出阻抗高,负载能力差
(2)寄生电容影响大
8.下图为变极距型平板电容传感器的一种测量电路,其中Cx为传感器电容,C为固定电容,假设运放增益A=%,输入阻抗Z=%;试推导输出电压Uo与极板间距的关系,并分析其工作特点。
题图4-1
Il列2
dUo
dt
dU|
c-dt
两边积分得到:
CUI=-cxUo
UcU|cdU|
UO-
Cx£S
式中负号表示输出电压Uo的相位与电源电压反相。
上式说明运算放大器的输出电压与极板间距离d线性关系。
运算放大器电路解决了单个变极板间距离式电容传感器的非线性问题。
但要求Zi及放大倍数K足够大。
为保证仪器精度,还要求电源电压Ui的幅值和固定电容C
值稳定。
第四章电感式传感器思考题答案
1.影响差动变压器输出线性度和灵敏度的主要因素是什么?
答:
影响差动变压器输出线性度和灵敏度的主要因素是:
传感器
几何尺寸、线圈电气参数的对称性、磁性材料的残余应力、测量电路零点残余电动势等。
2.电涡流式传感器的灵敏度主要受哪些因素影响?
它的主要优点是什么?
答:
电涡流式传感器的灵敏度主要受导体的电导率、磁导率、几何形状,线圈的几何参数,激励电流频率以及线圈到被测导体间的距离等因素影响。
电涡流式传感结构简单、频率响应宽、灵敏度高、测量范围大、抗干忧能力强,特别是有非接触测量的优点,因此在工业生产和科学技术的各个领域中得到了广泛的应用。
3.如图所示的差动电感式传感器的桥式测量电路,Li、L2为传感器的两差动电感线圈的电感,其初始值均为L。
。
Ri、R2为标准电阻,u为电源电压。
试写出输出电压u0与传感器电感变化量
△L间的关系。
解:
输出与输入的关系是
=,2町(L°+也L)厂2兀f(Lp—^L)U
U0J[2科(L°+也L)]2+R2j0f(L°-也L)]2+R;J
若电感增量无穷小,且两个电阻均为R,贝V:
题3图
4.为什么电感式传感器一般都采用差动形式?
解:
差动式结构,除了可以改善非线性,提高灵敏度外,对电源电压、频率的波动及温度变
化等外界影响也有补偿作用;作用在衔铁上的电磁力,是两个线圈磁力之差,所以对电磁力
有一定的补偿作用,从而提高了测量的准确性。
第5章热电偶传感器习题答案
1什么是金属导体的热电效应?
试说明热电偶的测温原理。
答:
热电效应就是两种不同的导体或半导体A和B组成一个回
路,其两端相互连接时,只要两结点处的温度不同,回路中就会产生一个电动势,该电动势的方向和大小与导体的材料及两接点的温度有关。
热电偶测温就是利用这种热电效应进行的,将热电
偶的热端插入被测物,冷端接进仪表,就能测量温度。
2.试分析金属导体产生接触电动势和温差电动势的原因。
答:
当A和B两种不同材料的导体接触时,由于两者内部单位体积的自由电子数目不同(即电子密度不同),因此,电子在两个方向上扩散的速率就不一样。
现假设导体A的自由电子密度大于导体B的自由电子密度,则导体A扩散到导体B的电子数要比导体B扩散到导体A的电子数大。
所以导体A失去电子带正电荷,导体B得到电子带负电荷,于是,在A、B两导体的接触界面上便形成一个由A到B的电场。
该电场的方向与扩散进行的方向相反,它将引起反方向的电子转移,阻碍扩散作用的继续进行。
当扩散作用与阻碍扩散作用相等时,即自导体A扩散到导体B的自由电子数与在电场作用下自导体B到导体A的自由电子数相等时,便处于一种动态平衡状态。
在这种状态下,A与B两导体的接触处就产生了电位差,称为接触电动势。
对于导体A或B,将其两端分别置于不同的温度场t、to中(t>t。
)。
在导体内部,热端的自由电子具有较大的动能,向冷端移动,从而使热端失去电子带正电荷,冷端得到电子带负电荷。
这样,导体两端便产生了一个由热端指向冷端的静电场。
该电场阻止电子从热端继续跑到冷端并使电子反方向移动,最后也达到了动态平衡状态。
这样,导体两端便产生了电位差,我们将该电位差称为温差电动势。
3.简述热电偶的几个重要定律,并分别说明它们的实用价值。
答:
一是匀质导体定律:
如果热电偶回路中的两个热电极材料相同,无论两接点的温度如何,热电动势为零。
根据这个定律,可以检验两个热电极材料成分是否相同,也可以检查热电极材料的均匀性。
二是中间导体定律:
在热电偶回路中接入第三种导体,只要第三种导体的两接点温度相同,则回路中总的热电动势不变。
它使我们可以方便地在回路中直接接入各种类型的显示仪表或调节器,也可以将热电偶的两端不焊接而直接插入液态金属中或直接焊在金属表面进行温度测量。
三是标准电极定律:
如果两种导体分别与第三种导体组成的热电偶所产生的热电动势已知,则由这两种导体组成的热电偶所产生的热电动势也就已知。
只要测得各种金属与纯铂组成的热电偶的热电动势,则各种金属之间相互组合而成的热电偶的热电动势可直接计算出来。
四是中间温度定律:
热电偶在两接点温度t、t0时的热电动
势等于该热电偶在接点温度为t、tn和如、to时的相应热电动势的代数和。
中间温度定律为补偿导线的使用提供了理论依据。
4.试述热电偶冷端温度补偿的几种主要方法和补偿原理。
答:
热电偶冷端温度补偿的方法主要有:
一是冷端恒温法。
这种方法将热电偶的冷端放在恒温场合,有0C恒温器和其他恒温器
两种;二是补偿导线法。
将热电偶的冷端延伸到温度恒定的场所
(如仪表室),其实质是相当于将热电极延长。
根据中间温度定律,
只要热电偶和补偿导线的二个接点温度一致,是不会影响热电动
势输出的;三是计算修正法。
修正公式为:
EAB(t,to)=EAB(t,ti)Eab(tl,to);四是电桥补偿法。
利用不平衡电桥产生的电动势补偿热电偶因冷端波动引起的热电动势的变化。
5.用镍铬-镍硅(K)热电偶测量温度,已知冷端温度为40C,用高精度毫伏表测得这时的热电动势为29.188mV,求被测点的温度。
解:
由镍铬-镍硅热电偶分度表查出E(40,0)=1.638mV,根据式
(5-2-1)计算出
E(t,O)=(29.1881.638)mV=30.826mV
再通过分度表查出其对应的实际温度为
二7oo+(30.826-29.129)。
00=740.9C
33.275-29.129
6.已知铂铑io-铂(S)热电偶的冷端温度to=25C,现测得热电动势E(t,to)=11.712mV,求热端温度是多少度?
解:
由铂铑10-铂热电偶分度表查出E(25,0)=
 升级会员
升级会员 