单元机组协调控制系统讲稿.docx
《单元机组协调控制系统讲稿.docx》由会员分享,可在线阅读,更多相关《单元机组协调控制系统讲稿.docx(23页珍藏版)》请在冰点文库上搜索。
单元机组协调控制系统讲稿
单元机组协调控制系统
概述
●定义:
锅炉和汽机相互配合接受外部负荷指令,共同适应电网对负荷的需求,并保证机组本身安全运行的控制系统。
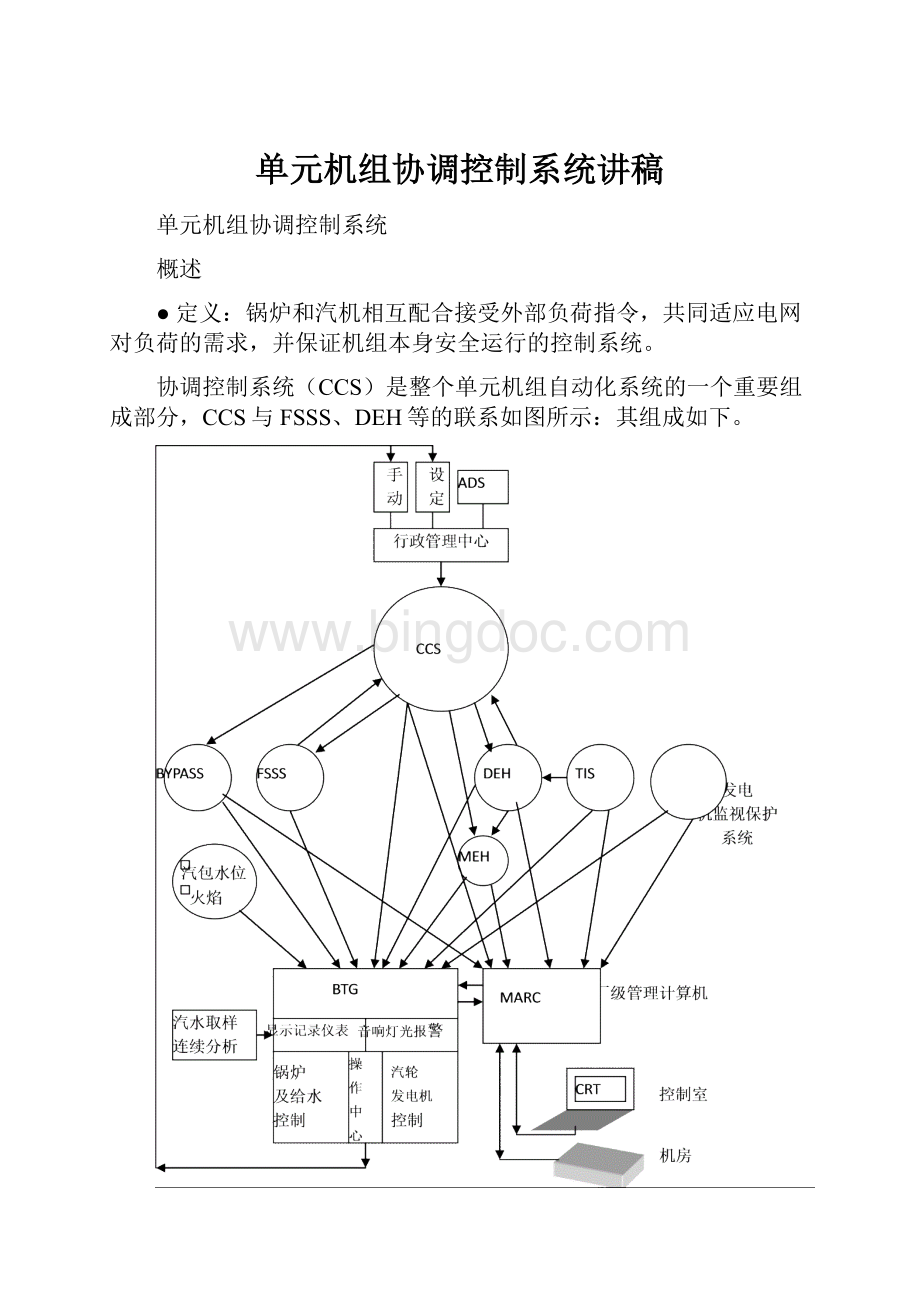
协调控制系统(CCS)是整个单元机组自动化系统的一个重要组成部分,CCS与FSSS、DEH等的联系如图所示:
其组成如下。
●组成:
主控制系统
锅炉的燃料控制系统
风量控制系统
给水控制系统和汽温控制系统
汽机侧的数字功频电液控制
正常运行时,锅炉和汽机控制系统接受来自主控制系统的负荷指令。
主控制系统是协调控制系统的核心部分,有时把主控制系统直接称为协调控制系统。
协调控制系统的方框图如下:
一、主控系统的组成
1、任务:
(1)产生负荷控制指令
(2)选择机组负荷控制方式
2、组成:
负荷(功率)指令处理装置
机炉主控制器
二、负荷指令处理装置
(一)负荷指令运算回路
输入信号:
机组值班员手动给定的负荷指令
ADS
Δf
输出信号:
机组负荷指令N0
负荷指令处理回路实例图
工作过程:
运行人员输入→负荷率限止→上下限限止→机组负荷出力。
图2负荷指令处理回路实例
(二)机组最大可能出力运算回路
●定义:
考虑各种辅机的运行状况而计算出的机组出力。
●机组最大可能出力运算回路原理图
(三)机组的允许最大负荷运算回路
●定义:
考虑锅炉燃烧器等不可测故障时,使锅炉的实际出力达不到机组功率指令N0的要求,而设置的机组负荷运算回路,简称返航回路。
●返航回路的工作过程:
(1)正常运行:
N允许=N最大,4接通6
(2)大于5%的燃烧率,积分器2的输出为机组允许最大负荷信号。
运算过程示意图如下:
图3机组最大可能出力运算回路原理图
图4机组允许最大负荷运算过程示意图
U2、U3、U4、U6分别为积分器2、反向器3、偏置器4和6的输出信号
τ0出现6%燃烧率偏差
τ1监控器31动作时间,切换器5将燃烧率偏差信号直接送入偏置器4
τ2燃烧率偏差信号=1%,机组允许最大负荷信号停止下降,机组稳定
τ3、故障排除,燃烧率偏差信号<1%,积分器输入为正值,直至允许最大出力等于最大可能出力。
τ4监控器31将切换器5恢复到原位置,返航回路恢复原状态。
三、协调控制系统的基本类型
1、以汽机跟随为基础的协调控制系统
(1)汽机跟随特点:
功率响应慢,汽压波动小。
(2)以汽机跟随为基础的协调控制的特点:
设法利用锅炉蓄热,允许汽压在一定范围内波动。
(3)系统原理图及方框图
(a)系统原理图
(b)系统方框图
图5以汽机跟随为基础的协调控制系统
2、以锅炉跟随为基础的协调控制系统
(1)构成:
在原有锅炉跟随控制系统基础上增加一个非线性元件而形成。
(2)系统原理图及方框图
(a)系统原理图
(b)系统方框图
图6以锅炉跟随为基础的协调控制系统
四、西屋机炉协调控制方案
1、主控系统组成:
负荷指令运算回路;机炉主控制器
2、工作方式:
7种
●基本方式(BASE)
●锅炉跟随1方式(BLRFLW1)
●锅炉跟随2方式(BLRFLW2)
●汽机跟随1方式(TURBFLW1)
●汽机跟随2方式(TURBFLW1)
●以锅炉跟随为基础的协调控制方式(COORDBF)
●以汽机跟随为基础的协调控制方式(COORDTF)
(一)负荷指令运算回路(LDC(LoadDemandComputer))结构原理
1、功能:
将各种负荷要求加工成机组实际可以接收的指令。
负荷要求:
运行人员设定的机组目标负荷;
电网调度中心遥控目标负荷(ADS);
机组异常工况对目标负荷的修正。
2、LDC原理框图
图7LDC原理图
(二)、机炉主控制器
机炉主控制器是以协调控制原理为基础建立起来的单元机组主控制装置,它由锅炉控制回路和汽机控制回路组成,接受LDC送来的实际负荷指令LDC输出,经处理后发出要求机炉协调响应的锅炉主控指令B.M和汽机主控指令T.M,同时根据机组的运行状态,进行工作方式的自动或手动切换。
机炉主控制器原理框图如图11所示。
从图中可以看出,它接受的输入信号有:
LDC输出指令、节流压力(机前压力或称主汽压力)设定信号TP.SP、节流压力(机前压力或称主汽压力)信号TP、电网频率校正信号HZ、机组总功率信号MW,根据机组不同工况和运行要求,锅炉主控B、M和汽机主控T.M可具备不同的工作方式(共有7种工作方式),由此构成LDC不同的运行方式。
不同工作方式下的机炉主控制器结构由LDC输出、TP.SP及各个控制逻辑的状态确定,它们与工作方式的对应关系如表l。
表中给出的均是被选定工作方式在正常工作时的状态或数值,其中,LDC输出一栏中括号内的值ADS为远方工作方式(RemotsMode)时由负荷指令运算回路来的负荷指令;TPSP一栏中括号内的值对应于滑压方式的情况;BMO为锅炉主控制器输出(BoilermasterOutnut);VLVTP为汽机调节阀门开度VLV与TPSP值的乘积。
表1各种状态与工作方式的对应关系
BASE
BF1
TF1
BF2
TF2
CC-BF
CC-TF
LDC输出
MW
VLVTP
BMO
Target
(ADS)
Target
(ADS)
Target
(ADS)
Target
(ADS)
TP.SP
TP
Target
(LDC)
Target
(LDC)
Target
(LDC)
Target
Target
(LDC)
Target
LDC自动
True
True
True
True
选择汽机跟踪
True
True
True
选择汽机调整
True
True
选择锅炉跟踪
True
True
True
选择锅炉调整
True
True
True
True
固定和跟踪
True
一、各工作方式下的机炉主控制器
1.基本方式(BaseMode)
当锅炉主控和汽机主控均在手动控制方式时,机组处于基本工作方式,此时,锅炉主控信号和汽机主控信号跟踪其手动信号。
可以画出基本方式,机护主控制器的原理框图,如图8所示:
2·锅炉跟随方式(BF1)
当锅炉主控自动和汽机主控手动时,机组将进入锅炉跟随1方式,此时,节流压力(机前压力)TP及其设定值TP.SP的偏差将送人锅炉节流压力控制器,控制器输出在加法器中与其功率前馈信号LDC输出相加,其输出经锅炉主控自动/手动站环节,得到锅炉主控信号B·M,汽机主控信号为LDC输出信号,这样由锅炉调节机前压力,汽机保证负荷要求。
可以画出锅炉跟随1方式下机炉主控制器的原理框图,如图9所示。
3、汽机跟随1方式(TF1)
当锅炉主控手动和汽机主控自动时,机组处于汽机跟随1方式,此时,节流压力(机前压力)TP及其设定值TP.SP的偏差信号进入汽机节流压力控制器,LDC输出信号作为功率前馈信号,控制器输出经汽机主控自动/手动站环节,得到汽机主控信号T.M,锅炉主控信号为LDC输出信号,即由汽机调节机前压力,锅炉满足负荷要求。
可以画出汽机跟随1方式下机炉主控制器的原理框图,如图10所示。
4、锅炉跟随2方式(BF2)
这种方式与BF1方式类似,机前压力仍由锅炉控制器调节,LDC输出信号经电网频率偏差信号校正后作为其功率前馈信号,仍由汽机保证负荷要求,汽机主控信号为LDC输出信号。
可以画出锅炉跟随2方式下机炉主控制器的原理框图,如图11所示。
5·汽机跟随2方式(TF2)
TF2方式由汽机调节机前压力,LDC输出信号作为其功率前馈信号,由锅炉满足负荷要求,LDC输出信号经电网频差信号校正后作为锅炉主控信号
可以画出汽机跟随2方式下机炉主控制器的原理框图,如图12所示。
6、以汽机跟随为基础的协调控制方式(CC-TF)
CC-TF方式仍由汽机调节机前压力,LDC输出信号作为其前馈信号,由发电机来的实发功率信号MW与其设定值LDC输出信号比较后,偏差信号送入功率控制器,控制器输出与经电网频率偏差信号校正后的LDC输出信号相加,最后得到锅炉主控信号,即由锅炉控制回路调节功率变化,满足负荷要求。
可以画出以汽机跟随为基础的协调控制方式下机炉主控制器的原理图,如图13所示。
7、以锅炉跟随为基础的协调控制方式(CC-BF)
这种方式由锅炉调节机前压力,LDC输出信号经电网频率偏差信号校正后作为其功率前馈信号,由汽机调节功率以满足负荷要求。
可以画出以锅炉跟随为基础的协调控制方式下机炉主控制器的原理框图,见图14。
上述BF2、TF2、CC-TF、CC-BF方式中,方案设计有一次调频功能,DEH来的汽机转速信号经一函数环节f(x),得到频率校正信号与实际负荷指令LDC输出相加,使机组参与电网一次调频,这样在电网二次调频之前就可以减小电网频率变化的幅度,提高机组的负荷适应能力。
若机组处于远方(Remote)ADS方式,这种控制方式和就地方式(BF1、TF1、BF2、TF2、CC-TF、CC-BF方式中任一种)一样操作,只是此时目标负荷由电网调度ADS设定,负荷变化速率由ADS增加/减少速率决定。
二、机护主控制器工作方式的切换
根据机组状态和负荷要求,机组运行中可能要改变工作方式,即从一种工作方式转换到另一种工作方式,转换过程中必须避免不必要的扰动.
各种工作方式转换的关系
工作方式的转换有两种,一种是运行人员手动切换,另一种是自动切换。
1、手动切换
设计中还考虑了用于实现滑压/定压、远方/就地的方式转换请求按键;
锅炉主控自动/手动操作站“BOILERMASTERA/MSTATION”;
汽机主控自动/手动操作站“TURBINEMASTERA/MSTATION”。
工作方式转换的方向.根据手动切换关系,可以把7种工作方分为3个级,即低级方式,包括BASE方式、BF1方式和TF1方式;中级方式包括BF2方式和TF2方式;高级方式包括CC-BF方式和CC-TF方式.在低级方式中,BASE方式是最基本的工作方式。
BF1方式和TF1不能直接互相切换,只能切回到BASE方式。
转换请求由BMS(BOILERMASTERA/MSTATION)和TMS(TURBINEMSTATION)进行。
在中级方式中,BF2和TF2方式方式不可以互相切换。
在高级方式中,CC-BF方式和CC-TF方式也可以互相切换,转换请求通过“CC-BF”健和“CC-TF”健实现。
手动切换可以实现由低级方式到中级方式和由中级方式到高级方式的切换。
在由低级方式到中级方式的切换中,只允许由BF1方式到BF2方式和由TF1方式到TF2方式的切换,不能交叉,转换请求由TMS和BMS两个操作站实现。
在由中级方式到高级方式的切换中,允许BF2方式到CC-BF方式和TF2方式到CC-TF方式的切换,也允许BF2方式到CC-TF方式和TF2方式到CC-BF方式的切换,即交叉切换。
2、自动切换
工作方式的自动切换是在满足某些条件下实现的,这种强制转换可以是高级方式到中级方式、中级方式到低级方式、高级方式到低级方式的转换,或者是中级方式和高级方式内的方式转换。
(1)节流压力(机前压力)信号传送故障逻辑有效时的自动切换
当节流压力(机前压力)信号的测量或传送出现故障时,节流压力信号传送故障逻辑有效,不管原先工作于何种方式,机组均将被强制切换到BASE方式,如图15所示。
这个强制切换是靠“汽机主控切手动”逻辑和“锅炉主控切手动”逻辑同时有效,从而实现汽机主控手动TMS“M”和锅炉主控手动BMS“M”的。
这是因为机前压力TP是一个极其重要的参数,在所有其它工作方式中,它都被作为被控参数,一旦TP信号的检测或传送有了故障,机组将由其它工作方式强行自动切换至基本方式。
(2)机组总功率(MW)信号传送故障逻辑有效时的自动切换
当机组总功率(MW)信号的检测或传送出现故障时,机组总功率信号传送故障逻辑有效,此时机组工作方式将由高级方式强行切换到中级方式,见图16。
这是因为实发功率信号只有在高级方式CC-BF方式和CC-TF方式中用作被控参数,所以将机组强行切换到中级方式.
如果机组原先的工作方式为CC-BF方式,将自动切换到BF2方式,如果机组原来工作在CC-TF方式,将自动切换到TF2方式。
(3)汽机主控100%逻辑有效的自动切换
当汽机主控输出达到了允许的极限时,汽机主控100%逻辑有效,这时强行将机组切换到BF2方式,见图17,而不管机组原来工作在何种方式(除低级方式外)。
(4)返航逻辑有效时的自动切换
当锅炉辅机有故障时,机组负荷能力只能由锅炉的负载能力决定,返航逻辑有效,机组将自动切换到TF2方式,而不管机组原来工作在何种方式(除低级方式外),见图18。
在上述情况下,机组负荷指令LDC输出将自动切换到跟踪返航目标值(RunBackTarget)。
3、可能引起扰动的方式切换关系
一般地说,由自动方式切换到手动方式不会引起附加的扰动,反过来,由手动方式切换到自动方式都可能引起附加的扰动。
考虑任何工作方式(除BASE方式外)到BASE方式的切换,其结果都是使BMS和TMS切入“手动”位置,因而机炉主控制器出现的变化不会影响到锅炉指令和汽机指令.此外,在低级方式中,只存在由BASE方式到BF1方式和由BASE方式到TF1方式的切换关系,不存在由BF1方式到TF1方式或反过来的切换关系。
所以,下列3类切换关系都可能引起附加的扰动:
(1)由低一级方式到高一级方式的切换,有可能引起挑动的切换关系列于表2
(2)由高一级方式到低一级方式的切换,有可能引起扰动的切换关系列于表3
(3)在同一级内进行的切换,有可能引起扰动的切换关系列于表4。
表2低一级方式到高一级方式的切换关系
切换关系
实现方法
BASE→BF1
BMS“A”
BASE→TF1
TMS“A”
BF1→BF2
TMS“A”
TF1→TF2
BMS“A”
BF2→CC-BF
“CC-BF”
BF2→CC-TF
“CC-TF”
TF2→CC-BF
“CC-BF”
TF2→CC-TF
“CC-TF”
表3:
高一级方式到低一级方式的切换关系
切换关系
实现方法
CC-BF→BF2
汽机主控100%逻辑有效,MW信号传送故障逻辑有效
CC-BF→TF2
返航逻辑有效
CC-TF→BF2
汽机主控100%逻辑有效
CC-TF→TF2
返航逻辑有效,MW信号传送故障逻辑有效
BF2→BF1
TMS“M”
BF2→TF1
BMS“M”
TF2→BF1
TMS“M”
TF2→TF1
BMS“M”
表4:
同一级内进行的切换关系
切换关系
实现方法
BF2→TF2
TF2→BF2
CC-BF→CC-TF
“CC-TF”
CC-TF→CC-BF
“CC-BF”
 升级会员
升级会员 