自动化生产线安装与调试输送站a教案1113.docx
《自动化生产线安装与调试输送站a教案1113.docx》由会员分享,可在线阅读,更多相关《自动化生产线安装与调试输送站a教案1113.docx(11页珍藏版)》请在冰点文库上搜索。
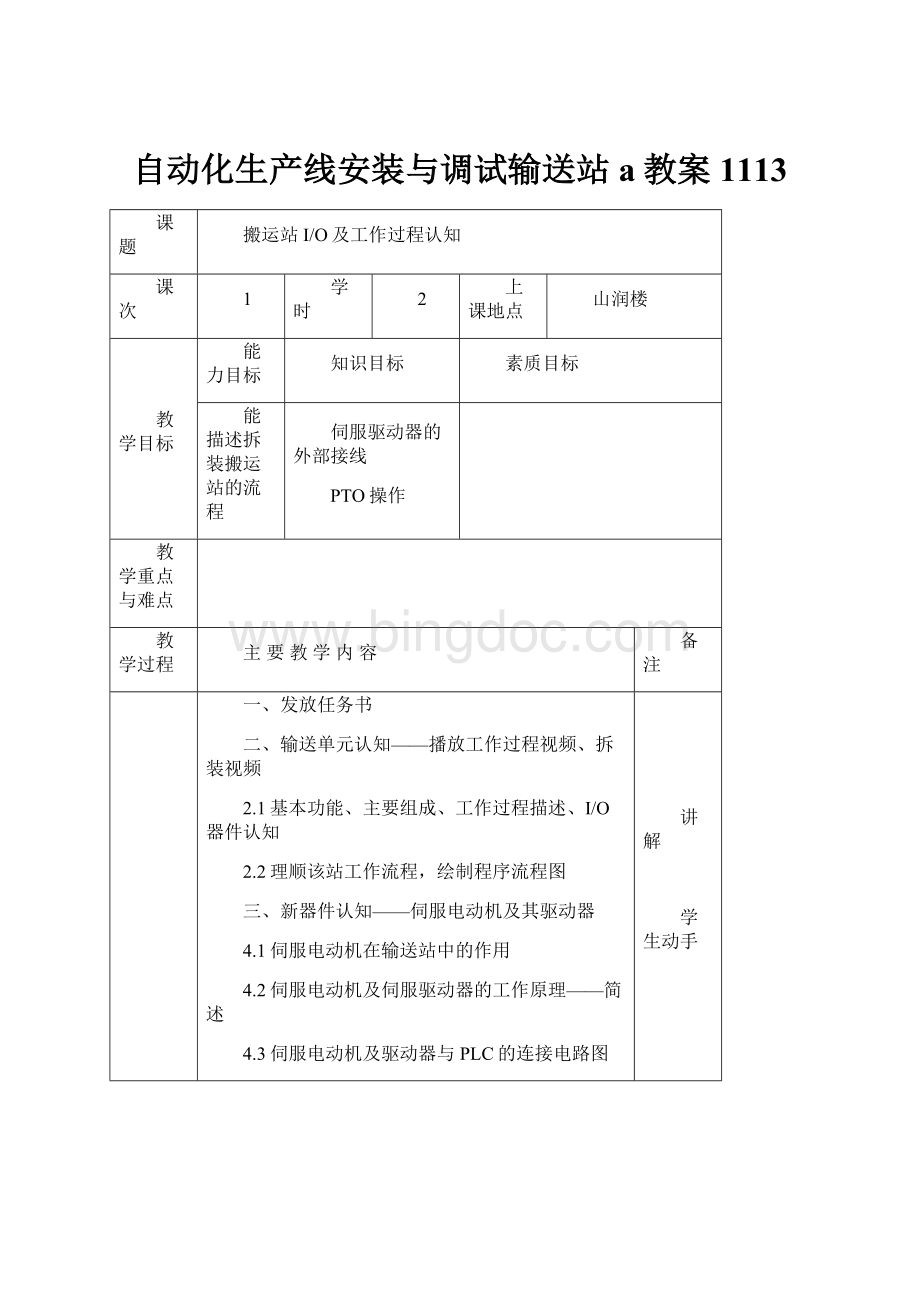
自动化生产线安装与调试输送站a教案1113
课题
搬运站I/O及工作过程认知
课次
1
学时
2
上课地点
山润楼
教学目标
能力目标
知识目标
素质目标
能描述拆装搬运站的流程
伺服驱动器的外部接线
PTO操作
教学重点与难点
教学过程
主要教学内容
备注
一、发放任务书
二、输送单元认知——播放工作过程视频、拆装视频
2.1基本功能、主要组成、工作过程描述、I/O器件认知
2.2理顺该站工作流程,绘制程序流程图
三、新器件认知——伺服电动机及其驱动器
4.1伺服电动机在输送站中的作用
4.2伺服电动机及伺服驱动器的工作原理——简述
4.3伺服电动机及驱动器与PLC的连接电路图
导线颜色与对应的信号
紫色:
脉冲
绿色:
方向
蓝、白、灰色:
0v
黑、红色:
左右限位开关
棕色:
伺服报警
黄色:
24v
4.4伺服电动机的参数设置方法
四、PLC位置控制——之位控向导的使用
5.1掌握使用位控向导编程实现位置控制的方法——PTO脉冲串发送及建立包络并运行起来的方法
讲解
学生动手
小结
作业
14-1
课题
伺服电动机及PTO实操
课次
1
学时
4
上课地点
格物楼
教学目标
能力目标
知识目标
素质目标
会操作使用伺服电机
会进行PTO输出操作
伺服电机操作设置及运转
教学重点与难点
教学过程
主要教学内容
备注
一、伺服电动机的参数设置方法
1.1面板认知
1.2参数设置及保存方法
二、编程实现PLC输出控制伺服电机运转
利用PLCQ0.0端子向伺服驱动器发送PTO脉冲串,利用Q0.1端子的置位、复位来控制电机的旋转方向。
教师演示
+
学生实操模仿
小结
常见问题:
ERROR38
解决方案:
pr04设置为2时,应保证CWL\CCWL端可靠的通过行程开关的常闭触点接地
作业
14-2
课题
搬运站PTO控制伺服电机简单编程总结
课次
1
学时
2
上课地点
山润楼
教学目标
能力目标
知识目标
素质目标
会操作使用伺服电机
会进行PTO输出操作
伺服电机操作设置及运转
教学重点与难点
教学过程
主要教学内容
备注
一、总结伺服电机使用流程
1.1总体接线流程:
PLC伺服驱动器伺服电机+编码器
具体接线图如下:
1.2伺服驱动器X5口外部接线详解如下表
X5口引脚号
端子名称
引出线颜色
接线
作用
1
OPC1(内有R)
紫色
至PLC的Q0.0
脉冲
2
OPC2(内有R)
绿色
至PLC的Q0.1
方向
4
PULSE2
银灰
至0V
6
SIGN2
白色
至0V
7
COM+
黄色
至24V
8
CW
红色
至左限位行程开关常闭触点
左限位断电报警
9
CCW
黑色
至右限位行程开关常闭触点
右限位断电报警
29
SRV-ON
蓝色
至0V
36
ALM-
蓝色
至0V
37
ALM+
棕色
至PLC的I1.2
好像没用到,报警状态发生时,此输出晶体管关断
41
COM-
蓝色
至0V
二、脉冲发生向导及位控向导的使用总结
PTO/PWM配置输出点为Q0.0或Q0.1配置发的脉冲串的类型为PTOorPWM配置电机的最高最低速度配置电机的加速减速时间配置包络(相对位置和单速连续旋转两种类型,配置位置(用脉冲数表示),配置该包络的发脉冲速度(pulse/sec),配置该包络包含多少步等等)
三、总结上节实操课的编程过程
同学总结
讲述
小结
作业
14-3
课题
搬运站五站运行控制编程分析
课次
1
学时
2
上课地点
山润楼
教学目标
能力目标
知识目标
素质目标
分析解决问题的能力
包络的熟练使用
子程序编程
学习能力
教学重点与难点
教学过程
主要教学内容
备注
一、搬运站工作过程分析
二、编程要求
Ø初始时如不在原点,先调用包络(单速连续旋转)回原点
Ø回原点后等待一个启动信号(此信号后续可用供料完成信号来代替)调用包络(相对位置)从供料站运行至加工站(发多少个脉冲呢)
Ø到达加工站后,等待3s,调用包络(相对位置)从加工站运行至装配站
Ø到达装配站后,等待3s,调用包络(相对位置)从装配站运行至分拣站
Ø到达分拣站后,等待3s,调用包络(单速连续旋转)从分拣站返回至原点
三、绘制流程图、手动编程并讨论
讲解
学生动手
小结
有些同学不测脉冲当量,不停的试位置,而且都是目测
用顺序步操作时,多步同时执行的情况,
作业
先描述工作过程,提交程序流程图
15-1
课题
搬运站包络编程实施
课次
1
学时
4
上课地点
格物楼
教学目标
能力目标
知识目标
素质目标
动手能力
动手能力
解决实际问题的能力
教学重点与难点
教学过程
主要教学内容
备注
一、根据程序流程图和初步的程序来编程实现搬运站的功能——搬运站在四个工作站之间运行
二、下载调试
三、记录问题及解决方案
四、交流讨论
讲解
学生动手
小结
作业
提交程序及其流程、程序编写重点难点及解决方案
15-2
课题
搬运站program总结
课次
1
学时
2
上课地点
山润楼
教学目标
能力目标
知识目标
素质目标
总结的能力
复习总结
自学能力
总结能力
教学重点与难点
教学过程
主要教学内容
备注
一、program汇报总结(2课时)
1.1总结汇报:
详细的编程思路以及重点程序演示
1.2教师总结、答疑
二、整体评价
组内自评-组间互评-教师评价
讲解
学生动手
小结
作业
提交程序及其流程、程序编写重点难点及解决方案
15-3
课题
搬运站五站运行控制+手爪动作编程分析
课次
1
学时
2
上课地点
山润楼
教学目标
能力目标
知识目标
素质目标
分析解决问题的能力
包络的熟练使用
子程序编程
学习能力
教学重点与难点
教学过程
主要教学内容
备注
一、搬运站机械手手爪动作过程分析
二、编程要求
Ø在已经完成包络控制的基础上完成以下内容
Ø到达各个站后,添加机械手的动作,比如到达加工站后,机械手模拟放下工件的动作,而等待3s后,机械手再模拟抓取工件的动作,完成后再调用前往下一站的包络
三、绘制流程图、手动编程并讨论
讲解
学生动手
小结
作业
先描述工作过程,提交程序流程图
16-1
课题
搬运站机械手手爪动作实操
课次
1
学时
2
上课地点
山润楼
教学目标
能力目标
知识目标
素质目标
分析解决问题的能力
包络的熟练使用
子程序编程
学习能力
教学重点与难点
教学过程
主要教学内容
备注
一、搬运站机械手手爪动作过程分析
二、编程要求
Ø在已经完成包络控制的基础上完成以下内容
Ø到达各个站后,添加机械手的动作,比如到达加工站后,机械手模拟放下工件的动作,而等待3s后,机械手再模拟抓取工件的动作,完成后再调用前往下一站的包络
三、编程并讨论
讲解
学生动手
小结
作业
先描述工作过程,提交程序流程图
16-2
课题
搬运站总结
课次
1
学时
2
上课地点
山润楼
教学目标
能力目标
知识目标
素质目标
分析解决问题的能力
包络的熟练使用
子程序编程
学习能力
教学重点与难点
教学过程
主要教学内容
备注
一、program汇报总结(2课时)
1.3总结汇报:
详细的编程思路以及重点程序演示
1.4教师总结、答疑
二、整体评价
组内自评-组间互评-教师评价
三、新知识——网络读写NETW/NETR
讲解
学生动手
小结
作业
先描述工作过程,提交程序流程图
16-3
 升级会员
升级会员 