机电控制作业matlab仿真速度环仿真实验汇总.docx
《机电控制作业matlab仿真速度环仿真实验汇总.docx》由会员分享,可在线阅读,更多相关《机电控制作业matlab仿真速度环仿真实验汇总.docx(17页珍藏版)》请在冰点文库上搜索。
机电控制作业matlab仿真速度环仿真实验汇总
机电系统控制技术
matlab仿真——速度环仿真实验
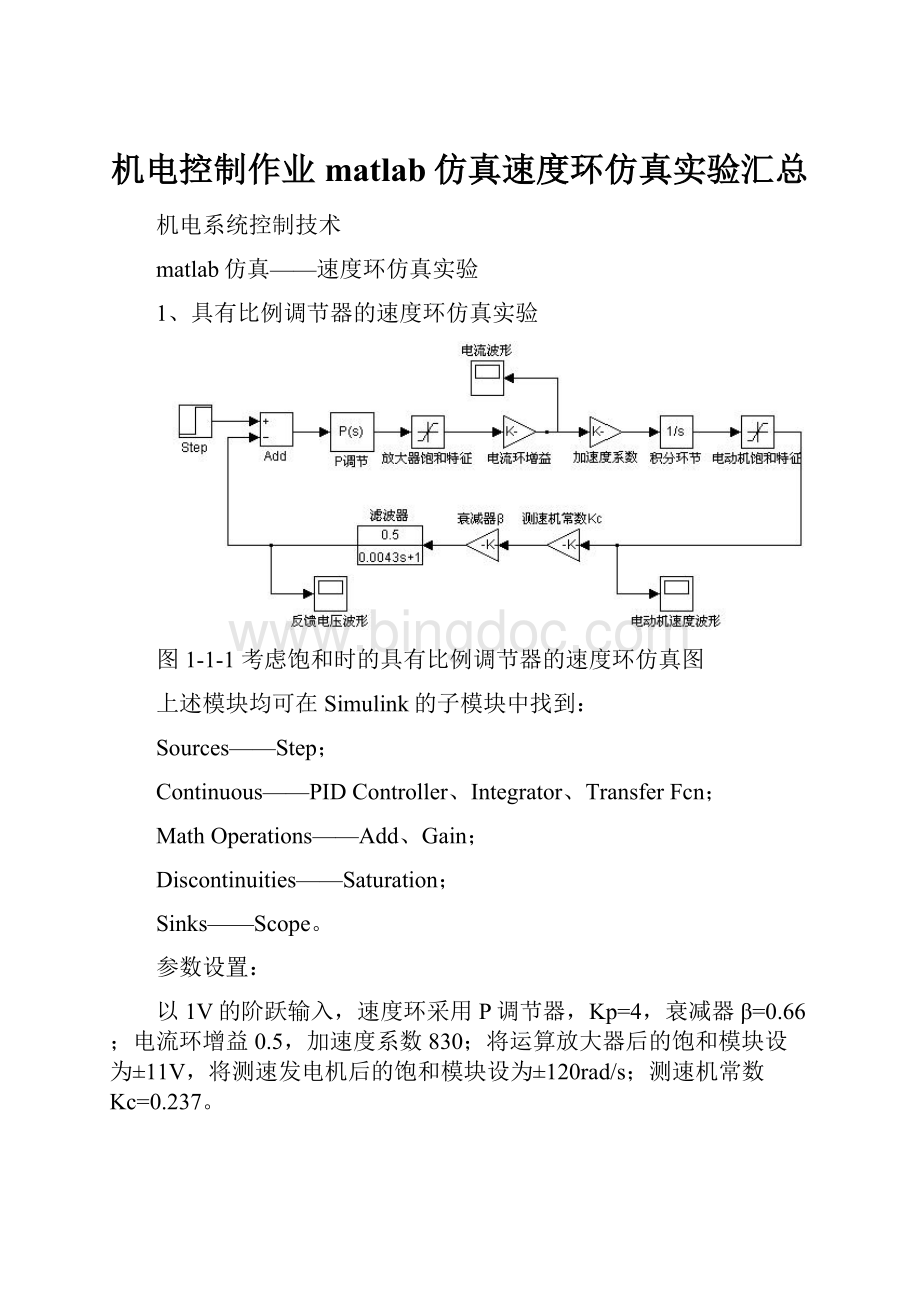
1、具有比例调节器的速度环仿真实验
图1-1-1考虑饱和时的具有比例调节器的速度环仿真图
上述模块均可在Simulink的子模块中找到:
Sources——Step;
Continuous——PIDController、Integrator、TransferFcn;
MathOperations——Add、Gain;
Discontinuities——Saturation;
Sinks——Scope。
参数设置:
以1V的阶跃输入,速度环采用P调节器,Kp=4,衰减器β=0.66;电流环增益0.5,加速度系数830;将运算放大器后的饱和模块设为±11V,将测速发电机后的饱和模块设为±120rad/s;测速机常数Kc=0.237。
图1-1-3速度环比例调节器的增益
图1-1-2输入阶跃参数
图1-1-4滤波器中传递函数参数设置
运行仿真,可得反馈电压信号的时域响应曲线(如图1-1-5)、电动机电流的时域响应曲线(如图1-1-6)、电动机转速的时域响应曲线(如图1-1-7)。
图1-1-5反馈电压信号的时域响应曲线图1-1-6电动机电流的时域响应曲线
图1-1-7电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
b=0.5;
Kp=4;
num1=Kp*b*830;
den1=[1,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,如图1-1-8所示。
图1-1-8调速系统闭环的伯德图
在伯德图上放大后可以看到系统闭环频宽200rad/s,折合约30Hz。
2、具有比例积分调节器的速度环仿真实验
图1-2-1考虑饱和时的具有PI调节器的速度环仿真图
可选择不同的PI调节器参数,如、、、。
2.1PI调节器参数选择时
其余参数不变,PI调节器的参数设置如图1-2-2所示。
图1-2-2
运行仿真,可得反馈电压信号的时域响应曲线(如图1-2-3)、电动机电流的时域响应曲线(如图1-2-4)、电动机转速的时域响应曲线(如图1-2-5)。
图1-2-3反馈电压信号的时域响应曲线图1-2-4电动机电流的时域响应曲线
图1-2-5电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
num1=[22.825,415];‘
den1=[0.004,0,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,如图1-2-6所示。
图1-2-6调速系统闭环的伯德图
2.2PI调节器参数选择时
其余参数不变,PI调节器的参数设置如图1-2-7所示。
图1-2-7
运行仿真,可得反馈电压信号的时域响应曲线(如图1-2-8)、电动机电流的时域响应曲线(如图1-2-9)、电动机转速的时域响应曲线(如图1-2-10)。
图1-2-8反馈电压信号的时域响应曲线图1-2-9电动机电流的时域响应曲线
图1-2-10电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
num1=[4.15,415];‘
den1=[0.004,0,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,如图1-2-11所示。
图1-2-11调速系统闭环的伯德图
2.3PI调节器参数选择时
其余参数不变,PI调节器的参数设置如图1-2-12所示。
图1-2-12
运行仿真,可得反馈电压信号的时域响应曲线(如图1-2-13)、电动机电流的时域响应曲线(如图1-2-14)、电动机转速的时域响应曲线(如图1-2-15)。
图1-2-13反馈电压信号的时域响应曲线图1-2-14电动机电流的时域响应曲线
图1-2-15电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
num1=[106.24,415];‘
den1=[0.018,0,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,
如图1-2-16所示。
图1-2-16
2.4PI调节器参数选择时
其余参数不变,PI调节器的参数设置如图1-2-17所示。
图1-2-17
运行仿真,可得反馈电压信号的时域响应曲线(如图1-2-18)、电动机电流的时域响应曲线(如图1-2-19)、电动机转速的时域响应曲线(如图1-2-20)。
图1-2-18反馈电压信号的时域响应曲线图1-2-19电动机电流的时域响应曲线
图1-2-20电动机转速的时域响应曲线
为了求得系统的闭环带宽,下面利用feedback函数求出闭环传递函数,其中sys1和sys2分别为前向通道和反馈回路的传递函数。
编写如下程序进行计算:
num1=[19.505,415];‘
den1=[0.018,0,0];
sys1=tf(num1,den1);
num2=0.237*0.66*0.5;
den2=[0.0043,1];
sys2=tf(num2,den2);
sys=feedback(sys1,sys2);
bode(sys)
grid
绘出调速系统闭环的伯德图,如图1-2-21所示。
图1-2-21
 升级会员
升级会员 