电弧跟踪测试.docx
《电弧跟踪测试.docx》由会员分享,可在线阅读,更多相关《电弧跟踪测试.docx(22页珍藏版)》请在冰点文库上搜索。
电弧跟踪测试
关于电弧跟踪测试。
仅作参考,以下数据在理想状态下测试。
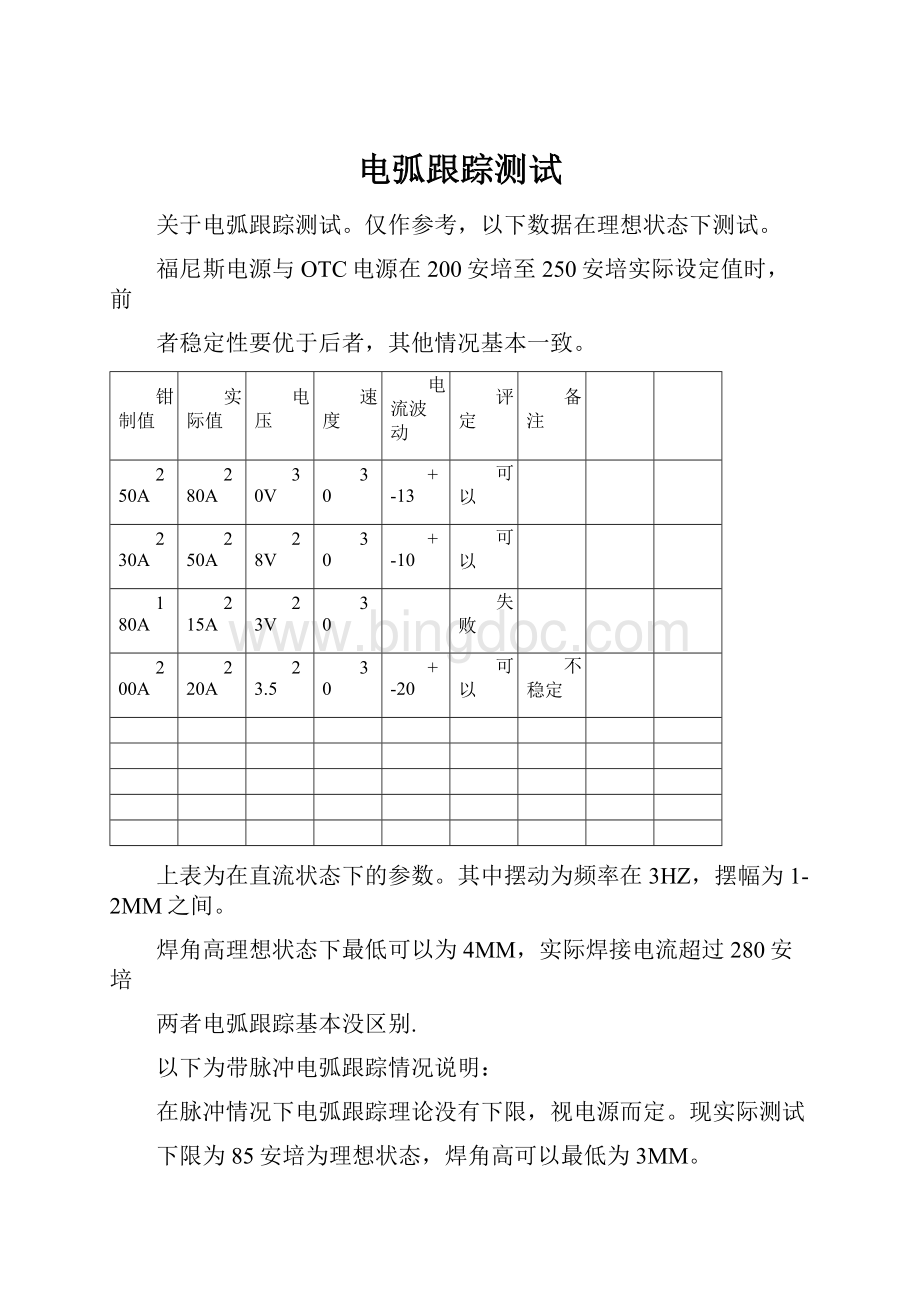
福尼斯电源与OTC电源在200安培至250安培实际设定值时,前
者稳定性要优于后者,其他情况基本一致。
钳制值
实际值
电压
速度
电流波动
评定
备注
250A
280A
30V
30
+-13
可以
230A
250A
28V
30
+-10
可以
180A
215A
23V
30
失败
200A
220A
23.5
30
+-20
可以
不稳定
上表为在直流状态下的参数。
其中摆动为频率在3HZ,摆幅为1-2MM之间。
焊角高理想状态下最低可以为4MM,实际焊接电流超过280安培
两者电弧跟踪基本没区别.
以下为带脉冲电弧跟踪情况说明:
在脉冲情况下电弧跟踪理论没有下限,视电源而定。
现实际测试
下限为85安培为理想状态,焊角高可以最低为3MM。
当时工件板厚为大约10MM,跟踪后焊缝成形不好。
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/11
信号名称形式#模拟状态
1[电压]GI[2]S0.0
2[电流]GI[3]U336.0
3[Motorcurrent]GI[4]U0.0
4[WireFeedSpeed]GI[5]U2.0
5[电弧检查]DI[201]UOFF
6[气体异常]GI[1]U0
7[线材异常]DI[203]UOFF
8[电源异常]DI[206]UOFF
9[确认粘丝]DI[225]UOFF
[类型]说明输入/出S:
模拟U:
解除>
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/4
1GI[\\\2]^
(电压)|
|*
210.000+--------*
|*|
30.000+--*|
*||
+-----+-----------+------>
40.000100.000
电压(Volts)
[类型]监视器对照说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/4
1GI[\\\3]^
(电压)|
|*
210.000+--------*
|*|
30.000+--*|
*||
+-----+-----------+------>
40.0001000.000
电流(Amps)
[类型]监视器对照说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/4
1GI[\\\4]^
(电压)|
|*
210.000+--------*
|*|
30.000+--*|
*||
+-----+-----------+------>
40.0005.000
Motorcurre>(Amps)
[类型]监视器对照说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/4
1GI[\\\5]^
(电压)|
|*
210.000+--------*
|*|
30.000+--*|
*||
+-----+-----------+------>
41.60022.000
WireFeedS>(m/min)
[类型]监视器对照说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[电弧检查]DI[201]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[气体异常]GI[1]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[线材异常]DI[203]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[电源异常]DI[206]
2极性:
INVERSE
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[确认粘丝]DI[225]
2极性:
INVERSE
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/12
信号名称形式#模拟状态
1\[送线速度]GO[4]U0.0
2[Arclengthcorr]GO[5]U0.0
3[Pulsecorrection]GO[6]U0.0
4[Burnbackcorr]GO[7]U0.0
5[起弧]DO[201]UOFF
6[气体]DO[209]UOFF
7[寸动送线(+)]DO[210]UOFF
8[寸动送线(-)]DO[211]UOFF
9[选择程序1]DO[203]UOFF
[类型]说明输入/出>
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
12/12
4[Burnbackcorr]GO[7]U0.0
5[起弧]DO[201]UOFF
6[气体]DO[209]UOFF
7[寸动送线(+)]DO[210]UOFF
8[寸动送线(-)]DO[211]UOFF
9[选择程序1]DO[203]UOFF
10[选择程序2]DO[204]UOFF
11[选择程序3]DO[205]UOFF
12\[粘丝异常][****]****
[类型]说明输入/出>
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/4
1GO[\\\4]^
(电压)|
|*
210.000+--------*
|*|
30.000+--*|
*||
+-----+-----------+------>
4160.0002200.000
送线速度(cm/min)
[类型]监视器对照说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/4
1GO[\\\5]^
(电压)|
|*
210.000+--------*
|*|
30.000+--*|
*||
+-----+-----------+------>
4-30.00030.000
Arclength>(%)
[类型]监视器对照说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/4
1GO[\\\6]^
(电压)|
|*
210.000+--------*
|*|
30.000+--*|
*||
+-----+-----------+------>
4-5.0005.000
Pulsecorre>(%)
[类型]监视器对照说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/4
1GO[\\\7]^
(电压)|
|*
210.000+--------*
|*|
30.000+--*|
*||
+-----+-----------+------>
4-200.000200.000
Burnbackco>(ms)
[类型]监视器对照说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[起弧]DO[201]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[气体]DO[209]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[寸动送线(+)]DO[210]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[寸动送线(-)]DO[211]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[选择程序1]DO[203]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[选择程序2]DO[204]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[选择程序3]DO[205]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输出\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[粘丝异常]\\[****]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[冷却水异常]\\[****]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\焊接输入\\\\\\\\\\\\\\\\\\\\
1/2
信号名称形式#
1[焊接有效]\\[****]
2极性:
NORMAL
[类型]监视器对照[选择]说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\数字信号输出\状态一览\\\\\\\
1/17
#范围RACKSLOT开始点状态
1DO[\\\1-20]0121ACTIV
2DO[21-104]000UNASG
3DO[105-168]8111ACTIV
4DO[169-200]000UNASG
5DO[201-208]8121ACTIV
6DO[209-216]8129ACTIV
7DO[217-224]81217ACTIV
8DO[225-232]81225ACTIV
9DO[233-240]81233ACTIV
10DO[241-248]81241ACTIV
[类型]状态一览IN/OUT设定清除说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\数字信号输出\状态一览\\\\\\\
17/17
#范围RACKSLOT开始点状态
8DO[225-232]81225ACTIV
9DO[233-240]81233ACTIV
10DO[241-248]81241ACTIV
11DO[249-256]81249ACTIV
12DO[257-264]81257ACTIV
13DO[265-272]81265ACTIV
14DO[273-280]81273ACTIV
15DO[281-288]81281ACTIV
16DO[289-296]81289ACTIV
17DO[\297-512]000UNASG
[类型]状态一览IN/OUT设定清除说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\数字信号输入\状态一览\\\\\\\
1/18
#范围RACKSLOT开始点状态
1DI[\\\1-22]0119ACTIV
2DI[23-104]000UNASG
3DI[105-168]8111ACTIV
4DI[169-200]000UNASG
5DI[201-208]8121ACTIV
6DI[209-216]8129ACTIV
7DI[217-224]81217ACTIV
8DI[225-232]81225ACTIV
9DI[233-240]81233ACTIV
10DI[241-248]81241ACTIV
[类型]状态一览IN/OUT设定清除说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\数字信号输入\状态一览\\\\\\\
18/18
#范围RACKSLOT开始点状态
9DI[233-240]81233ACTIV
10DI[241-248]81241ACTIV
11DI[249-256]81249ACTIV
12DI[257-264]81257ACTIV
13DI[265-272]81265ACTIV
14DI[273-280]81273ACTIV
15DI[281-288]81281ACTIV
16DI[289-296]81289ACTIV
17DI[297-304]81297ACTIV
18DI[\305-512]000UNASG
[类型]状态一览IN/OUT设定清除说明
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\群组输出\状态一览\\\\\\\\\\\
#仿真值1/64
GO[1]\U\0[EQ1OperMode]
GO[2]U0[EQ1JobNumber]
GO[3]U0[EQ1PrgNumber]
GO[4]U32767[EQ1WeldCmnd1]
GO[5]U32767[EQ1WeldCmnd2]
GO[6]U127[EQ1WeldCmnd3]
GO[7]U127[EQ1WeldCmnd4]
GO[8]**[]
GO[9]**[]
GO[10]**[]
GO[11]**[]
按I/O号码顺序表示
[类型]定义IN/OUT仿真解除>
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\Gruop:
群组输出\\\\\\\\\\\\\\
1/64
GO#RACKSLOT开始点点数
1\81\233
2812178
3812257
48123316
58124916
6812658
7812738
80000
90000
100000
[类型]监控器IN/OUT说明>
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\Gruop:
群组输入\\\\\\\\\\\\\\
1/64
GI#RACKSLOT开始点点数
1\81\298
28123316
38124916
48126516
58128116
60000
70000
80000
90000
100000
[类型]监控器IN/OUT说明>
SRVO-003Deadman开关放开
SUBSUB21行\T2\暂停\\\\G1\\\手动坐标100\%
I/O\UOP:
控制信号\输出\\\\\\\\\\\
1/3
#范围RACKSLOT开始点状态
1UO[\\\1-8
 升级会员
升级会员 