相机镜头原理及其选型.pdf
《相机镜头原理及其选型.pdf》由会员分享,可在线阅读,更多相关《相机镜头原理及其选型.pdf(15页珍藏版)》请在冰点文库上搜索。
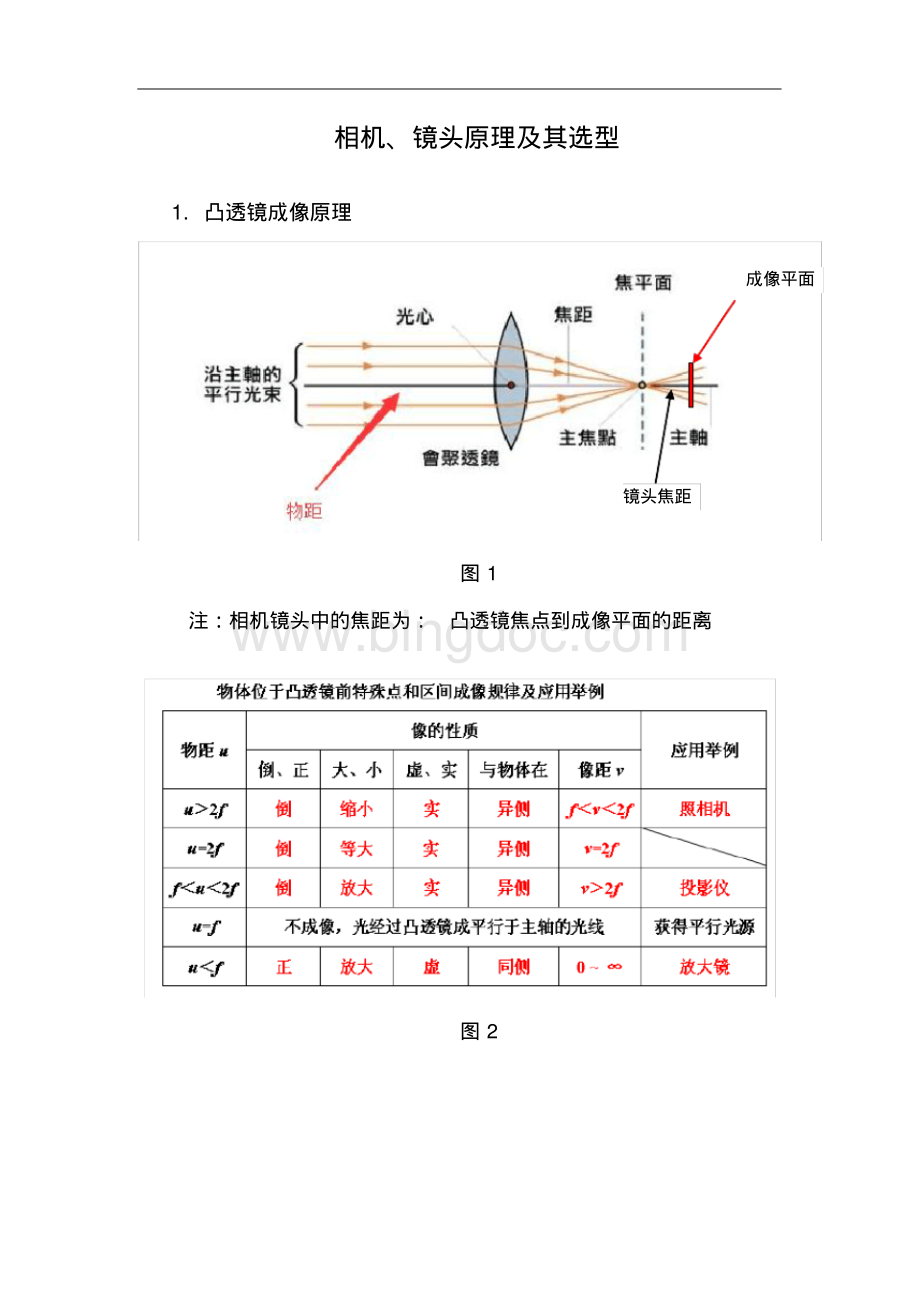
相机、镜头原理及其选型1.凸透镜成像原理图1注:
相机镜头中的焦距为:
凸透镜焦点到成像平面的距离图2成像平面镜头焦距2.相机原理相机成像实际就是凸透镜成像,拍摄物体反射光经镜头(凸透镜)聚焦,在感光系统上形成倒立缩小的像,像经进一步处理得到相片或数码图像。
3.相机相关概念3.1.CCD(Charge-coupledDevice,电荷耦合元件)CCD是图像传感器,将光信号转换成电信号,再将电信号转换成镜头部分相机机身数字信号,经处理后成为图像信号。
结构:
(1)、大量光敏元件排在一起组成感光元件(每个光敏元件为一个像素点)。
(2)、并行信号寄存器,用于暂时储存感光后产生的电荷。
(3)、串行信号寄存器,暂时储存并行寄存器的模拟信号并将电荷转移放大。
(4)、信号放大器,放大微弱电信号。
(5)、数摸转换器,将放大的电信号转换。
目前工业相机主要CCD尺寸3.2.CMOS和CCD一样,是图像传感器。
区别在于:
(1)、信号的读出过程不同,CCD是通过一个或几个节点统一读出像素,CMOS通过单个像素同时读取,因此一致性CCD更好。
(2)、集成性CCD更复杂(3)、CMOS读取速度更快。
(4)、CCD技术更成熟,噪声少,成像质量更好。
3.3.像素相机感光元件上每个光敏元件即为一个像素点。
注:
要想得到高清照片,必须保证有一定的像素数。
但并非像素数越大,照片的就越清晰。
照片的清晰度是由“点像决定,即每点(寸等)有多少像素。
通常相机的像素大小又被叫做相机分辨率。
3.4.感光度(IOS)、增益(Gain)
(1)、感光度:
为数码单反相机的参数之一,表示图像传感器或胶片对光的敏感程度,增加感光度,图像更亮,但画质变差。
(2)、增益:
为工业相机参数之一,是调节感光度的一种方法。
增益增加,图像更亮,但画质变差。
(3)、感光度和增益的区别为:
一:
适用对象不同,感光度常用于数码单反相机,而增益用于工业相机;二:
提高感光度可通过多种方式获得,而提高增益恰是提高感光度的一种方式。
3.5.帧率相机采集传输图像的速率,对于面阵相机一般为每秒采集的帧数(Frames/Sec.),对于线阵相机为每秒采集的行数(Hz)。
4.镜头相关概念4.1.焦距成像光线在镜头内交点到影像传感器的距离称作焦距,焦距数值小,视角大;焦距数值大,视角小。
蓝色光线所表示的焦距相对红色变大,其视角则变小。
4.2.光圈光圈:
由叶片组成的用于控制光通过量的装置。
绝对孔径:
光圈的实际孔径大小。
曝光量:
除去外部环境因素,曝光量与曝光度和曝光时间成正比。
曝光时间由快门决定,而曝光度与光圈的绝对孔径和镜头焦距成正比。
相对孔径:
为了反映曝光度,将孔径与焦距的比值定义为相对孔径。
光圈值(f):
为焦距与绝对孔径的比值,即相对孔径的倒数。
较大的光圈(较小的f值)意味着有更多光线通过镜头,可在弱光环境中拍摄。
4.3.快门通过控制曝光时间控制曝光量的装置。
快门分机械快门和电子快门。
机械快门:
通过机械方式控制通光孔(快门)的开闭。
电子快门:
利用了CCD感光系统不通电不工作的原理。
4.4.景深
(1)、拍摄景物中能产生较为清晰影像的最近点至最远点的距离。
2222fFLFf光圈值越大,景深越小;光圈值越小、景深越大。
焦距越长,景深越小;焦距越短,景深越大。
距离拍摄体越近时,景深越小;
(2)、景深与光圈的关系(进一步说明景深)注:
弥散圆:
物点成像时,由于像差,其成像光束不能会聚于一点,而是在像平面上形成一个扩散的圆形投影,成为弥散圆。
弥散圆只要在人眼接受范围内,就算清晰的像。
由上图可知,当使用小光圈时,在更大的景深范围内依然形成满足清晰要求的弥散圆。
因此,小光圈(更大f值),景深更大。
4.5.分辨率在成像平面上1毫米间距内能清晰分辨的黑白相间的线条对数,单位是“线对/毫米”(lp/mm,line-pairs/mm)。
测试方法:
将待测镜头装在一个胶片照相机上。
去拍摄黑白条纹图(分辨率图版),然后用高倍放大镜(镜头分辨率检测仪)检测底片上每毫米范围内能清晰分辨的线条对数,能分辨得越多则分辨率越高。
注:
镜头分辨率和相机分辨率配合,才能排出高质量图像。
4.6.视场(Fieldofview,即FOV,也叫视野范围)指观测物体的可视范围,也就是充满相机采集芯片的物体部分。
4.7.工作距离(WorkingDistance,即WD)指清晰成像时,从镜头前部到受检验物体的距离。
4.8.失真(distortion)又称畸变,指被摄物平面内的主轴外直线,经光学系统成像后变为曲线,则此光学系统的成像误差称为畸变。
畸变像差只影响影像的几何形状,而不影响影像的清晰度。
畸变透镜的固有特性(凸透镜汇聚光线、凹透镜发散光线),所以无法消除,只能改善。
工业上对畸变要求高的场合可选用远心镜头。
4.9.镜头类型标准、远心、广角、近摄、远摄。
5.工业相机及镜头选型说明5.1.选择相机感光芯片尺寸
(1)、原则一:
相机像素大小(分辨率)所需相机像素大小
(2)、原则二:
镜头可支持的最大感光芯片尺寸相机芯片尺寸(3)、原则三:
静止拍照、全局曝光选CMOS;运动拍照选CCD。
5.2.选择相机与镜头接口类型5.3.波长、变焦与否成像过程中需要改变放大倍率的应用,采用变焦镜头,否则采用定焦镜头。
工业相机镜头的工作波长,可考虑:
是否采用可见光波段;是否采取滤光措施;单色光还是多色光;能否有效避开杂散光的影响?
5.4.镜头工作距离与焦距一般地:
结合CCD像素尺寸、工作距离,视角大小可计算工业相机镜头的焦距。
5.5.选择光圈镜头的光圈大小决定图像的亮度,在拍摄高速运动物体、曝光时间很短的应用中,应该选用大光圈镜头,以提高图像亮度。
5.6.特殊要求优先考虑结合实际的应用特点,可能会有特殊的要求。
例如是否有测量功能,是否需要使用远心镜头,成像的景深是否很大等等。
5.7.成本和技术成熟度如果以上因素考虑完之后有多项方案都能满足要求,则可以考虑成本和技术成熟度,进行权衡择优选取。
6.相机镜头选型示例6.1.例一:
同时选择相机和镜头6.2.例二:
已知相机选择镜头要给硬币检测成像系统选配工业相机镜头,约束条件:
相机CCD2/3英寸,像素尺寸4.65m,C口。
工作距离大于200mm,系统分辨率0.05mm。
光源采用白色LED光源。
(1)、CCD尺寸2/3,所选镜头支持像面应该不小于2/3CCD尺寸。
(2)、接口类型C口。
(3)、与白色LED光源配合使用,镜头应该是可见光波段。
没有变焦要求,选择定焦镜头。
(4)、成像的放大率M=4.65/(0.05*1000)=0.093焦距f=L*M=200*0.093=18.6mm(5)、用于工业检测,其中带有测量功能,所以所选镜头的畸变要求小。
从以上几方面的分析计算可以初步得出这个镜头的“轮廓”:
焦距大于17mm,定焦,可见光波段,C口,至少能配合2/3英寸CCD使用,而且成像畸变要小。
按照这些要求,可以进一步的挑选,如果多款镜头都能符合这些要求,可以择优选用。
6.3.例三:
已知镜头选择相机
(1)、确定像素大小,进而确定感光芯片尺寸。
(2)、确定接口。
(3)、确定相机类型:
线阵还是面阵。
7.其他重要概念7.1.远心镜头
(1)、概念通过在光学系统的中间位置放置孔径光阑以及设计平行光路,使得在一定的物距范围内,图像放大倍率不会随物距的变化而变化。
(2)、应用远心镜头主要解决的问题是:
物体位置变化引起比例尺改变;畸变;投影误差;物体边缘测量误差大。
在工业图像处理中,一般只使用物方远心镜头。
偶尔也有使用两侧远心镜头的,(当然价格更高),像方远心镜头一般来说不会用。
主要实际应用:
机械零件量测;塑料零件量测;玻璃及药用容器量测;电子组件量测;粒子量测;量测高精度彩色打印;半导;过滤器控制;血液分析及细胞数量计算等。
(3)、原理及分类物方远心光路设计原理及作用:
平行于光轴的物方光线的会聚中心位于像方无限远,称之为:
物方远心光路。
将孔径光阑放置在光学系统的像方焦平面上,当孔径光阑放在像方焦平面上时,即使物距发生改变,像距也发生改变,但测得的物体尺寸不会变化。
其作用为:
可以消除物方由于调焦不准确带来的,读数误差。
像方远心光路设计原理及作用:
平行于光轴的像方光线的会聚中心位于物方无限远,称之为:
像方远心光路。
在物方焦平面上放置孔径光阑,使像方主光线平行于光轴,从而虽然CCD芯片的安装位置有改变,在CCD芯片上投影成像大小不变。
其作用为:
可以消除像方调焦不准引入的测量误差。
两侧远心光路设计原理及作用:
综合了物方/像方远心的双重作用。
主要用于视觉测量检测领域。
(4)、选型说明当检查物体遇到以下6中情况时,最好选用远心镜头:
1)当需要检测有厚度的物体时(厚度1/10FOV直径);2)需要检测不在同一平面的物体时;3)当不清楚物体到镜头的距离究竟是多少时;4)当需要检测带孔径、三维的物体时;5)当需要低畸变、图像效果亮度几乎完全一致时;6)当缺陷只在同一方向平行照明下才能检测到时。
根据使用情况(物体尺寸和需要的分辨率)选择物方尺寸合适的物方镜头和CCD或CMOS相机,同时得到像方尺寸,即可计算出放大倍率,然后根据产品列表选择合适的像方镜头。
选择过程中还应注意景深指标的影响,因为像/物倍率越大景深越小,为了得到合适的景深,可能还需要重新选择镜头。
7.2.面阵相机、线阵相机
(1)、面阵相机相机感光元件以矩阵排列,可直接获取二维图像信息,测量图像直观。
主要用于面积、形状、尺寸、位置,甚至温度等的测量。
优点:
可获取二维图像信息,测量图像直观。
缺点:
像元总数多;每行的像元数一般较线阵少,帧幅率受到限制。
(2)、线阵相机相机感光元件以线的方式排列,应用领域是检测连续运动的材料,例如金属、塑料、纸和纤维等。
优点:
一维像元数可以做得很多,而总像元数较面阵CCD相机少;像元尺寸比较灵活,帧幅数高,特别适用于一维动态目标的测量;线阵CCD分辨力高,价格低廉,可满足大多数测量视场的要求。
不足:
图像获取时间长,测量效率低;由于扫描运动及相应的位置反馈环节的存在,增加了系统复杂性和成本;图像精度可能受扫描运动精度的影响而降低,最终影响测量精度。
(3)、线阵相机选用说明计算像素:
幅宽除以最小检测精度得出每行需要的像素实际检测精度:
幅宽除以像素数得出实际检测精度行频:
长度除以精度得出每秒扫描行数如幅宽为1600毫米、精度1毫米、运动速度22000mm/s相机像素:
1600/11600像素最少2000像素,选定为2k相机实际精度:
1600/20480.8行频:
22000mm/0.8mm27.5KHz应选定相机为2048像素28kHz相机
 升级会员
升级会员 