自动控制习题答案.docx
《自动控制习题答案.docx》由会员分享,可在线阅读,更多相关《自动控制习题答案.docx(265页珍藏版)》请在冰点文库上搜索。
自动控制习题答案
第一章
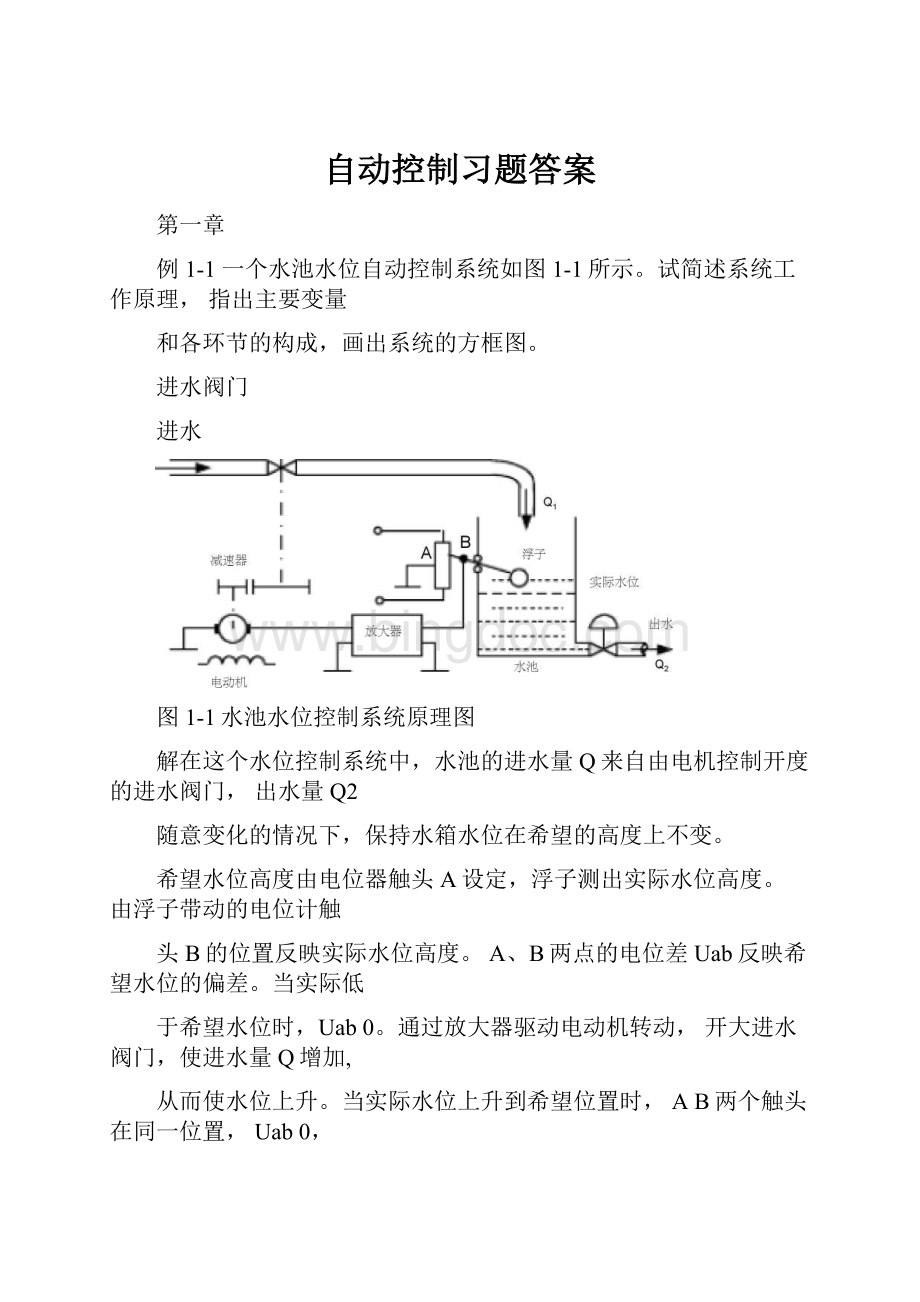
例1-1一个水池水位自动控制系统如图1-1所示。
试简述系统工作原理,指出主要变量
和各环节的构成,画出系统的方框图。
进水阀门
进水
图1-1水池水位控制系统原理图
解在这个水位控制系统中,水池的进水量Q来自由电机控制开度的进水阀门,出水量Q2
随意变化的情况下,保持水箱水位在希望的高度上不变。
希望水位高度由电位器触头A设定,浮子测出实际水位高度。
由浮子带动的电位计触
头B的位置反映实际水位高度。
A、B两点的电位差Uab反映希望水位的偏差。
当实际低
于希望水位时,Uab0。
通过放大器驱动电动机转动,开大进水阀门,使进水量Q增加,
从而使水位上升。
当实际水位上升到希望位置时,AB两个触头在同一位置,Uab0,
电动机停止转动,进水阀门开度不变,这时进水量Q1和出水量Q2达到平衡位置。
若实际
水位高于希望水位,Uab0,则电动机使进水阀门关小,使进水量减少,实际水位下降。
这个系统是个典型的镇定系统,在该系统中:
控制量希望水位的设定值
被控制量实际水位
扰动量出水量Q2
被控对象水池
测量元件浮子
比较元件电位器
放大元件放大器
执行元件电动机、减速器、进水阀门
系统的方框图如图1-2所示。
控制系统中各元件的分类和方框图的绘制不是唯一的,只要能正确反映其功能和运动规律即可。
希望水位设定位
图1-2水池水位控制系统方框图
例1-2图1-3所示为发电机电压调节系统,试分析系统的工作原理,画出方框图并指出
系统的结构特点。
解发电机在电枢转速和激磁电压恒定不变时,负载变化将引起输出电压和电枢回路电流
的改变。
当负载增大时,将引起电枢电压下降和电枢电流增大,因此,电枢回路的电流在电阻R上的电压增大,ub也增大,由于Ub与Ui的极性一致,因而发电机的激磁电压上升,使输出电压增大。
这种由扰动产生附加控制作用的系统是扰动控制系统(本系统是将负载变化作为扰动输入的。
图1-3所示的电压调节方式只能克服负载变化对发电机输
出电压的影响)。
系统方框图如图1-4所示。
图1-3发电机电压调节系统
图1-4系统方框图
第二章
【例2-1】求图2-1所示矩形脉冲的象函数
【解】图中的矩形脉冲函数可用解析式表示为
A0tT
f(t)
0Tt
f(t)
A
所以,f(t)可以看作两个函数的叠加
f(t)A1(t)A1(tT)
图2-1
例2-1图
即可求得其象函数
L[f(t)]L[f1(t)]L[f2(t)]
sT
或直接运用拉氏变换定义式求取
Lf(t)0f(t)estdt
:
Aestdt
ste
A(1s
【例2-2】求f(s)
s4
2s23s
1的拉氏反变换。
【解】F(s)的部分分式为
s
F(s)
4
3s1
(2s1)(s
1)
k1
2s
k2
s1
求系数k1、k2
k1
(2s1)(s1)(2s
1)
k2
s4(s
(2s1)(s1)
1)
f(t)L1F(s)L1
2s1
3.5e05t
3et
【例2-3】求下面象函数的原函数
F(s)
s
s(ss1)
【解】F(s)的部分分式为
s
F(s)站
k2sk3
1
由等式相等,所以可知
1)
解得
ki
k2
k1(s2s1)(k2sk3)s
s(ss1)
(k2s
k3)s
k3
F(s)的部分分式可求得
_…1s
s
F(s);
s0.5
22
(s0.5)0.866
0.5780.866
22
(s0.5)0.866
注:
0.50.5780.866
则F(s)的拉氏反变换为
f(t)
1
F(s)
0.5t
cos0.866t0.578e
0.5t
sin0.866t
【例2-4】求下列象函数的拉氏反变换。
F(s)
s(s
1
3
2)(s3)
【解】运用部分分式展开法,有
F(s)(s
kn
k12
(s2)2
k1
(s
3
2)
k2
k3
s3
求得待定系数
kn
F(s)(s2)3
1
s(s3)
k12
—F(s)(sds
2)
ds
k13
丄厶F(s)(s
2!
ds2
2)3
s(s3)
1d2
二.2'
(2s3)s2(s
3)2
2dss(s3)
k2
F(s)s
k3
F(s)的部分分式为
s0
(s
3
2)(s3)
24
F(s)(s3)
s(s
1
_2)3
1/2F(s)
(s2)
分别查表可求得F(s)的拉氏反变换为
1/4
2
(s2)
3/81/24
(s2)s
1/3
f(t)
L1
F(s)
lt2e2t
4
t2
1
12)e
2t
3t
12t
te
4
1
24
32t113t
ee
8243
【例2-5】解方程y(t)
5y(t)
6y(t)
其中,y(0)2,y(0)
【解】将方程两边取拉氏变换,得
2
sY(s)sy(0)
y(0)
5sY(s)
y(0)
6Y(s)
将y(0)2,y(0)2代入,并整理,得
…、2s2
Y(s)
12s6
所以
【例2-6】将非线性方程yx
s(s2)(s
y(t)1
1
x2x
2
【解】根据式(2-3),线性化后的方程应为
故线性化后的方程为
3)
5e2t4e3t
x2在原点附近线性化。
(2
2x
分析:
本题方程中只有X2是非线性项,
化的结果是
x2
2x)x
只要将X2在原点线性化就可以了。
x2在原点线性
xx(2x)x00
所以,线性化后原方程式右边只剩下前三项线性项。
【例2-7】求图2-2所示系统输入为Ui,输出为Uo时的传递函数
Ui(s)
C
(a)(b)
图2-2无源电网络
【解】根据基尔霍夫定律,采用运算阻抗的方法,所以传递函数为
(a)Uz(S)
Ui(s)
(b)U^(s)
Ui(s)
R2
RiR2
R2
1
CS
Ri
Ri
1
Cs
R2CS1
(R1R2)Cs1
RiR2CSR2
RiR2CSR1R2
Cs
Cs
u(t)0°
【提示】基尔霍夫定律的时域表示式为:
对任一结点,i(t)0;对任一回路,电阻R的运算阻抗就是电阻R本身,电感L的运算阻抗是Ls,电容C的运算阻抗是1Cs,
其中s为拉氏变换的复参量。
把普通电路中的电阻R、电感L、电容C全换成相应的运算
阻抗,把电流i(t)和电压u(t)全换成相应的拉氏变换式I(s)和U(s),因此可得到根据拉氏
变换的线性性质而得出基尔霍夫定律的运算形式为:
I(s)0;对任一回路,U(s)0°
于是我们可以采用普通的电路定律,如欧姆定律、基尔霍夫定律和电压定律,经过简单的代数运算,就可求解I(s)、U(s)及相应的传递函数。
采用运算阻抗的方法又称为运算
法,相应的电路图称为运算电路。
【例2-8】求图2-3所示有源电网络的传递函数,图中“⑴、U2(t)分别是输入和输出电
(a)
(b)
图2-3有源电网络
【解】(a)由图
(1)求得,根据理想运算放大器反相输入时的特性,有
U2(S)
Ri
R2
Ri
1
CiS
Ri
Ci
6
R1C2s
R2Gs
1
C1s
这也是PID控制器。
(b)设电压匕⑴如图所示。
Ua(s)
1
C1S
Ua(s)
1
C2S
U3(s)U2(s)
R3
U2(s)
R3C1S
R2Gs1
R3C2S1U3(s)
U1(s)
R1
U3(S)
1
C1S
由此可得
U1(s)
R1C1s
R2C1s
1U3(s)
最后联立上述方程,解得
R2C1R3C2R3C1
R1C1
R2R3C21
s
R1R1C1s
U2(S)
U1(s)
这是PID控制器。
提示:
上述传递函数是在理想运算放大器及理想的电阻、电容基础上推导出来的,对于实际元件来说,它只是在一定的限制条件下才成立。
【例2-9】如图2-4所示电枢控制式直流电动机,试以ei(t)为输入量,。
⑴为输出量
的建立微分方程。
其中:
ei(t)是电动机电枢输入电压,
o(t)是电动机输出转角,Ra是电枢绕组的电阻,L
是电枢绕组的电感,ia(t)是流过电枢绕组的电流,em(t)是电动机感应电势,T(t)是电动
是电动机及负载折合到电
机转矩,J是电动机及负载折合到电动机轴上的转动惯量,动机轴上的粘性摩擦系数。
e(t)
Raia(t)
普em(t)
【解】根据基尔霍夫定律,有
根据磁场对载流线圈的作用定律,有
T(t)
2a(t)
其中,Kt是电动机转矩常数。
根据电磁感应定律,有
em(t)
d。
⑴
e
dt
其中,Ke是反电势常数。
根据牛顿第二定律,有
-J
T(t)f-dt
0(t)
3
Lj—
LaJdt3
电枢电感La通常较小,若忽略不计,系统微分方程可简化为
2RaJ—(Raf心心)4^
dtdt
(LafRaJ)
2
d。
⑴
dt2
-J
(RafKtK。
)—
Kt©(t)
当电枢电感La,电阻Ra均较小,都忽略时,系统微分方程可进一步简化为
Ke
d。
⑴
dt
&(t)
【例2-10】试求图2-5所示机械平动系统输入为
x,输出为y时的传递函数Y(S)
X(s)
(a)(b)
图2-5机械平动系统
【解】(a)根据牛顿第二定律,列写动力学微分方程
fd(xy)
dt
ki(xy)k2y
2
dy
m—2
dt
dym2
dt
k2y
fd(xy)dt
k1(xy)0
进行拉氏变换并整理
(ms2
fsk1
k2)Y(s)
(fsk1)X(s)
得
Y(s)
fs
k1
X(s)
msfs
k2
即
(b)设B点位移为Xb,根据B、C点力平衡关系列写方程
对于B点
ki(XXb)
d(XBy)
dt
对于C点
fd(XB
dt
y)
k2y
上面两个方程两边同时进行拉氏变换(初始条件为0),有
k1X(s)Xb(s)sfXb(s)Y(s)
sfXb(s)Y(s)k2Y(s)
解上述方程组,得
Y(s)fski
X(s)kik2fs(kik2)
【提示】机械系统的建模可根据牛顿第二定律或达朗伯原理推导。
牛顿第二定律:
一物体的加速度与其所受的合外力成正比,与其质量成反比,而且加速度与合外力同方向。
达朗伯原理:
作用在物体上的合外力与该物体的惯性力构成平衡力系。
达朗伯原理用公式可表示为:
mxFi0,其中,Fi是作用在物体上的合外力;x是物体的加速度;
m是物体的质量;mx是物体的惯性力。
对于机械系统的建模,取质量、弹簧、阻尼之间相关的连接点进行受力分析,并根
据牛顿第二定律建立该点处的力平衡方程;当有些连接点处的运动未知时,可认为是中
间参考点,联立方程后即可消去。
【例2-11】齿轮传动的动力学分析。
设有如图2-6a所示的齿轮传动链,由电动机
M输入的扭矩为
Tm,L为输出端负载,
Tl为负载扭矩。
图中所示的
z为各齿轮齿数,
J1、J2、J3及1、
2、
3分别为各轴及相
应齿轮的转动惯量和转角。
乙
等效轮系
(a)原始轮系
(b)
—TLeq
图2-6
齿轮传动链
【解】假设各轴均为绝对刚性,即
Kj
Tm
J1
,可得如下动力学方程
1f11T1
T2
T4
J3
式中
1、f2、
f3传动中各轴及齿轮的粘性阻尼系数;
T1――齿轮Z1对Tm的反转矩;
T2——Z2对T1的反转矩;
T3Z3对T2的反转矩;
T4――Z4对T3的反转矩;
Tl输出端负载对T4的反转矩,即负载转矩。
由齿轮传动的基本关系可知
T2
三%2
Z1
Z1
—1
Z2
Z4T
Z3
Z1Z3
T4
—T3,3
—2
1
Z3
Z4
Z2Z4
于是可得
Tm
J11
f11
z1z3
J22f22
Z2Z4
J33
f32Tl
2
22
2
乙
乙
Z3
乙X
乙
Z3£
乙Z3
J1
J2
J31f1f2
f31
Z2
Z2
Z4
Z2
Z2
Z4
Z2Z4
2
2
JeqJ1
Z1
J2
乙
Z3
J3
称为等效转动惯量;
Z2
Z2
Z4
2
2
feqf1
Z1
f2
Z1
Z3
f3
称为等效阻尼系数;
Z2
Z2
Z4
TLeq三三Tl称为等效输出转矩。
Z2Z4
将上式改为
TmJeq1Beq1TLeq
则图2-6a所示的传动装置可简化为图2-6b所示的等效齿轮传动。
【例2-12】画出下列RC电路的方框图。
【解】
R
图2-7一阶RC网络
利用基尔霍夫电压定律及电容元件特性可得
UiUo
1,u
idt
c
对其进行拉氏变换得
l(s)
Ui(s)Uo(s)
R
Uo(s)
l(s)
sC
因此图2-7即可转换为图2-8运算电路形式。
R
+
由此分别得到图2-9a和2-9b,将图2-9a和2-9b组合起来即得到图2-9c,图2-9c为该
一阶RC网络的方框图。
(c)
1
i(si(1(b)
【例2-13】画出下列
图2-9一阶RC网络的方框图
RC网络的方框图,并求传递函数。
RiR2
01I——[Ir
Ur
Uc
图2-10两级RC滤波器电路
【解】
(1)首先根据电路定理列出方程,写出对应的拉氏变换,也可直接将上图转化
成运算电路图的形式,如下图
R1Ud(s)R2
l1(s)1丄
Ur(S)莎一T
J(S)1
sC2
十Uc(s)
图2-11两级RC滤波器电路
(2)根据列出的4个式子作出对应的框图。
Ur(s)Uq(S)
Ii(s)
Uq(S)
l2(S)
R1
l1(S)l2(s)
sC1
UC1(S)Uc(s)
Uc(S)
R2l2(S)sC2
(3)根据信号的流向将各方框依次连接起来。
根据上述公式,画出方框图
I1
隔离放大器
仁1
J
U
U
图2-11带隔离放大器的两级RC网络
R(s)+
【例2-14】试化简如图2-12所示系统的方框图,并求系统传递函数。
所以传递函数为
1
2
Uc(s)R1R2SC1C21
2
Ur(S),1111R1R2C1C2S(R1C1R1C2R2C2)S1
12
SR1C1SR2C1SR2C2R1R2SC1C2
由图清楚地看到,后一级R,C2网络作为前级R1C1网络的负载,对前级R-C1网络的
输出电压Uq产生影响,这就是负载效应。
如果在这两极RC网络之间接入一个输入阻抗很
大而输出阻抗很小的隔离放大器,如图2-11所示。
R1R2
则图2-11电路的方框图为
【解】
R(s)+E(s)用方框图等效变换法求解,
图2-12例2-14g6/G4
++
A点后移,得G3G4
C(s)
G5
G7
G6/G4
R(s)+
E(s)
G1
+
G2
G3G4
C(s)
—
1+G3G4G5
G7
R(s)+
E(s)
G1
G2G3G4
1+G3G4G5+G2G3G6
C(s)
G7
R(s)
G1G2G3G4
C(s)
1+G3G4G5+G2G3G6+G1G2G3G4G7
所以,传递函数为
C(s)G1G2G3G4
R(s)1G2G3G5G3G4G6G1G2G3G4G7
【提示】:
等效变换时,应将分支点(相加点)向另外的分支点(相加点)移动,宜向另外的相加点(分支点)移动。
般不
【例2-15】化简下面方框图,求系统传递函数C©。
【解】
方法一:
设变量E(s),G(s),C2(s)如上图所示。
由此可列写出下列方程组
E(s)
R(s)
C(s)
C(s)
C1(s)
C2(s)
G(s)
E(s)
C2(s)G1(s)
C2(s)
E(s)
C1(s)G2(s)
上述方程组中,一共有4个方程,5个未知量
E(s),R(s),C(s),C1(s),C2(s),消去中间变量
E(s),G(s),C2(s)即可得出C(s)与R(s)之间的关系
C(s)G(s)G2(s)
丽1Gi(s)G2(s)Gi(s)G2(s)
方法二:
采样梅逊公式,有4条前向通道和5个回环。
4条前向通道
RG1(S),P2Gi(s)G2(S),P3G2(S),P4G1(S)G2(S)
对应的余因子
12341
5个回环
LiGi(s)G2(s)Gi(s)G2(s)Gi(s)G2(s)Gi(s)G2(s)
特征式
1Li1Gi(s)G2(s)Gi(s)G2(s)
由此可得系统的传递函数为
C(s)G(s)G2(s)
R(s)1G1(s)G2(s)G1(s)G2(s)
可见,结果与方法一相同。
方法三:
用方框图等效变换方法化简如下:
R(s)
GG2
C(s)
1g,G2G1G2
可得系统的传递函数为
C(s)G(s)G2(s)
R(s)1Gi(s)G2(s)Gi(s)G2(s)
结果与方法一、二均相同。
梅逊公式的作用,可以校验方框图化简的结果是否正确。
【解】用梅逊公式求解。
本题有6条前向通路,其中第6条前向通路很容易被漏掉,需特别注意。
有3个回环,回环间均有接触。
求解过程如下:
11K1s11K111丄KK(s1)
ssssssss2s3
故Gb(s)
C(s)
R(s)
s
s
s
K
1
1
K
p
s
s
s
2
1
s
11
s
s
s
s
2
1
1
1
s
——
―
s
s
s1
1
s
s
s
1
1
s
—
—
s
s
R
P2
P3
P4
F5
P6
kH
s1
s
s1
s
1
s
K(s1)
3
s
K(s1)Kss2(s1)s3s2(s1)s2
s3s2KsKsK
C(s)
图2-15例2-17控制系统信号流图
【解】此系统有7个单独回环,即af,bg,ch,bi,dif,ehi和dgehif因此
L1afbgchbidifehidgehif
两个互不接触的回环有3种组合,即afbg,afch及bgch,所以
L2afbgafchbgch
三个互不接触的回环只有1种组合,即afbgch
L3afbgch
由此可求特征式
1L1L2L3
1afbgchbidifehidgehifafbgafchbgchafbgch
从源节点到汇节点有5条前向通道,由于5条前向通道与所有的回环均有接触,因此
Rabc11
P2dc21
P3ae31
P4dge41
P5die51
将以上结果代入梅逊公式,可得系统的传递函数
C(s)1abcdcaedgedie
耳k
R(s)1afbgchbidifehidgehifafbgafchbgchafbgch
【例2-18】用梅逊公式求图2-16所示系统信号流图的传递函数D及B。
AA
【解】现用梅逊公式求取对应于同一个源节点
和不同阱节点的两路传递函数。
值得指出,对于给
定的系统信号流图,梅逊公式中的特征式
是确定
不变的,只是对于不同的源节点和阱节点,
其前向
通路和余因子式是不同的。
例2-18系统信号流图
此系统有3个单独回环,
L1
即
fbgdeg
图2-16
两个互不接触的回环有
1种组合,即
L2fbg
由此可求特征式
L1
L2
1fbg
degfbg
从源节点到汇节点B有
1条前向通道,
P
因此
a
将以上结果代入公式,可得系统的传递函数
a(1f)
degfbg
bg
B1
R1
A1
从源节点到汇节点D有2条前向通道,因此
Rabc
P,adec
将以上结果代入梅逊公式,可得系统的传递函数
abc(1f)adec
fbgdegfbg
【例2-19】
已知卜列方程组:
Xds)
aXo(s)
bX1(s)
cX2(s)
dXa(s)
X2(s)
eXo(s)
Ms)
gX2(s)
hX3(s)
Xa(s)
iX0(s)
jXds)
kX2(s)
lXa(s)
试求传递函数G(s)
Xa(s)
0
P22
D1
——P1
A
【解】可先根据方程组画出信号流图如图
f
图2-17信号流图
2-17所示,然后由梅逊公式就可求解。
此系统有8个单独回环,即
两个互不接触的回环有
6种组合,即
L2
bg
bl
 升级会员
升级会员 