FX仿真软件使用手册.docx
《FX仿真软件使用手册.docx》由会员分享,可在线阅读,更多相关《FX仿真软件使用手册.docx(21页珍藏版)》请在冰点文库上搜索。
FX仿真软件使用手册
PLC是“Programmable Logic Controller(可编程序逻辑控制器)”的英文缩写,是采用微电脑技术制造的自动控制设备。
它以顺序控制为主,回路调节为辅,能完成逻辑判断、定时、记忆和算术运算等功能。
及传统的继电器控制相比,PLC控制具有控制速度快、可靠性高、灵活性强、硬件接线简单、改变工艺方便等优点。
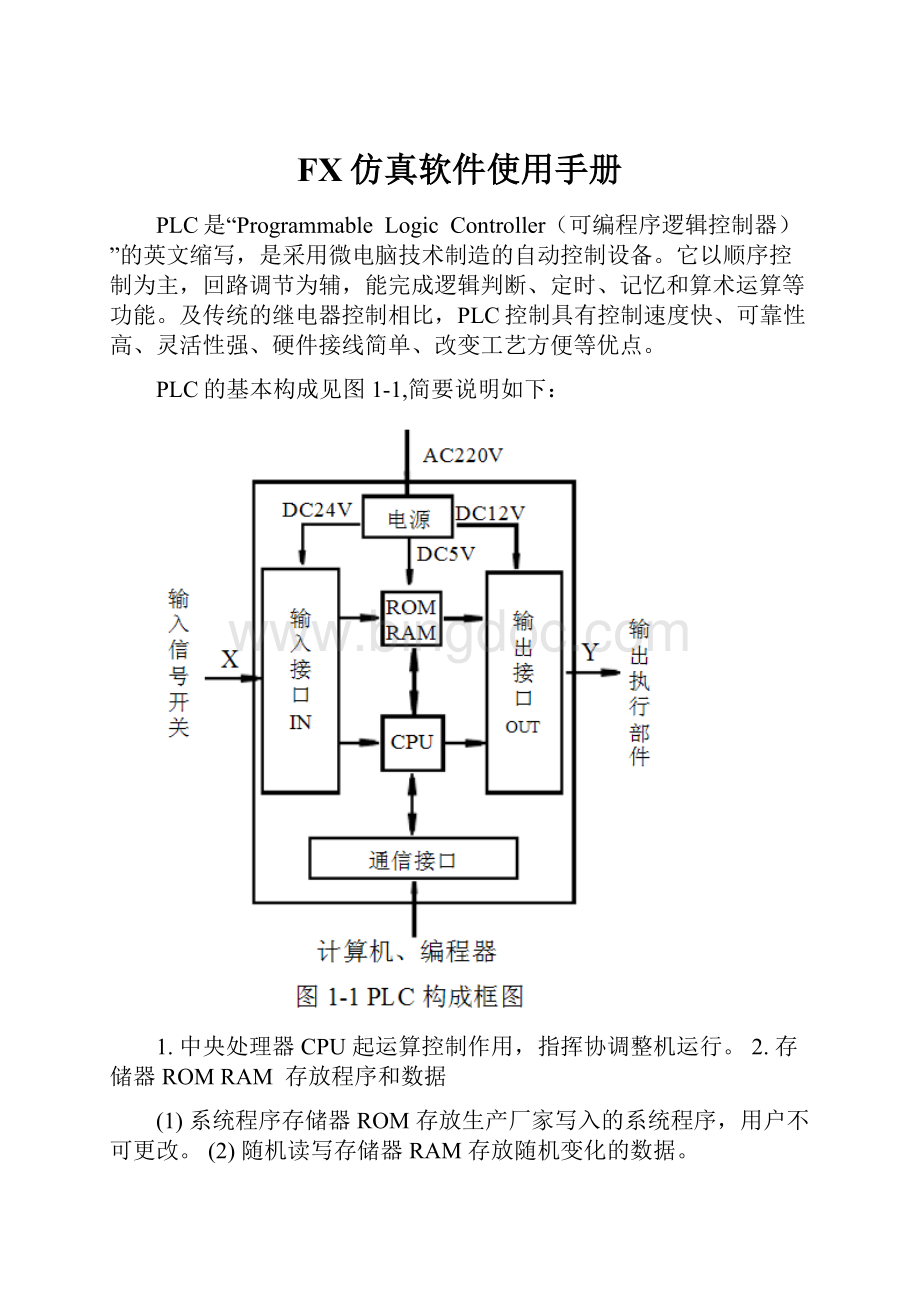
PLC的基本构成见图1-1,简要说明如下:
1. 中央处理器CPU 起运算控制作用,指挥协调整机运行。
2. 存储器ROM RAM 存放程序和数据
(1) 系统程序存储器ROM 存放生产厂家写入的系统程序,用户不可更改。
(2) 随机读写存储器RAM 存放随机变化的数据。
(3) 用户程序存储器EPROM或E2
PROM 存放用户编写的用户程序。
3. 通信接口 及计算机、编程器等设备通信,实现程序读写、监控、联网等功能。
4. 电源 利用开关电源将AC220V转变成DC5V供给芯片;DC12V供给输出继电器;
DC24V供给输入端传感器。
另有锂电池做为备份电源。
5. 输入接口IN 将外部开关或传感器的信号传递给PLC。
6. 输出接口OUT 将PLC的控制信号输出到接触器、电磁阀线圈等外部执行部件。
作为一般技术人员,对于上述构成,主要关心的是输入输出接口。
输入输出接口的详细情况,见第9页§3.2的有关介绍和图2-3 PLC输入输出接口电路示意图。
随着PLC技术的发展,其功能越来越多,集成度越来越高,网络功能越来越强,PLC及PC机联网形成的PLC及其网络技术广泛地应用到工业自动化控制之中,PLC集三电及一体,具有良好的控制精度和高可靠性,使得PLC成为现代工业自动化的支柱。
PLC的生产厂家和型号、种类繁多,不同型号自成体系,有不同的程序语言和使用方法,但是编程指导思想和模式是相同的,其编程和调试步骤如下:
1. 设计I/O接线图
根据现场输入条件和程序运行结果等生产工艺要求,设计PLC的外围元件接线图,作为现场接线的依据,也作为PLC程序设计的重要依据。
(I/O接线图参见9页图2-3) 2. 编制PLC的梯形图和指令语句表
根据生产工艺要求在计算机上利用专用编程软件编制PLC的梯形图,并转换成指令语句表(FX系列PLC编程常用指令见13页表2-2)。
3. 程序写出及联机调试
用编程电缆连接计算机和PLC主机,执行“写出”操作,将指令语句表写出到PLC主机。
PLC输入端连接信号开关,输出端连接执行部件,暂不连接主回路负载,进行联机调。
PLC的控制方式是由继电器控制方式演化而来,由PLC内部的微电子电路构成的模拟线圈和触点取代了继电器的线圈和触点,用PLC 的程序指令取代继电器控制的连接导线,将各个元件按照一定的逻辑关系连接起来,PLC控制的梯形图在许多方面可以看作是继电器控制的电路图。
可以理解为,PLC内部有大量的由软件程序构成的继电器、计时器和计数器等软元件,用软件程序按照一定的规则将它们连接起来,取代继电控制电路中的控制回路。
本文第一章介绍利用PLC计算机仿真软件,学习PLC用户程序设计,并且仿真试运行、调试程序。
由于仿真软件不需要真正的PLC主机,就可以在计算机上仿真运行调试,所以它既是学习PLC程序设计的得力助手,也给实际工作中调试程序带来很大方便。
本章的编程仿真练习题,请读者认真完成,会对掌握PLC应用大有帮助。
本文第二章介绍PLC实际应用的编程软件的使用方法。
§2 PLC计算机仿真软件
FX系列PLC可用“FX-TRN-BEG-C”仿真软件,进行仿真运行。
该软件既能够编制梯形图程序,也能够将梯形图程序转换成指令语句表程序,模拟写出到PLC主机,并模拟仿真PLC控制现场机械设备运行。
使用“FX-TRN-BEG-C”仿真软件,须将显示器象素调整为1024*768,如果显示器象素较低,则无法运行该软件。
§2.1 仿真软件界面和使用方法介绍
启动“FX-TRN-BEG-C”仿真软件,进入仿真软件首页。
软件的A-1、A-2两个章节,介绍PLC的基础知识,此处从略,请读者自行学习。
从A-3开始,以后的章节可以进行编程和仿真培训练习,界面显示如图2-1所示。
编程仿真界面的上半部分为仿真界面,下半部分为编程和显示操作界面。
§2.1.1仿真界面
编程仿真界面的上半部分,左起依次为远程控制画面、培训辅导画面和现场工艺仿真画面。
点击远程控制画面的教师图像,可关闭或打开培训辅导画面。
仿真界面“编辑”菜单下的I/O清单选项,显示该练习项目的现场工艺过程和工艺条件的I/O配置说明。
对每个练习项目的I/O配置说明,需仔细阅读,正确运用。
远程控制画面的功能按钮,自上而下依次为:
“梯形图编辑”-------将仿真状态转为编程状态,可以开始编程;
“PLC写入” --------将转换完成的用户程序,写入模拟的PLC主机。
PLC写入后,方可进行仿真操作,此时不可编程;
“复位” -----------将仿真运行的程序停止复位到初始状态; “正 俯 侧” -----选择现场工艺仿真画面的视图方向; “< >” ---------选择基础知识的上一画面和下一画面; “主要” -----------返回程序首页;
“编程/运行”显示窗---显示编程界面当前状态。
仿真现场给出的X的位置,实际是该位置的传感器,连接到PLC的某个输入接口X;给出的Y的位置,实际是该位置的执行部件被PLC的某个输出接口Y所驱动。
本文亦以X或Y的位置替代说明传感器或执行部件的位置。
仿真现场的机器人、机械臂和分拣器等,为点动运行,自动复位。
仿真现场的光电传感器,遮光时,其常开触点接通,常闭触点分断,通光时相反。
在某个培训练习项目下,可根据该项目给定的现场工艺条件和工艺过程,编制PLC梯形图,写入模拟的PLC主机,仿真驱动现场机械设备运行;也可不考虑给定的现场工艺过程,仅利用其工艺条件,编制任意的梯形图,用灯光、响铃等显示运行结果。
§2.1.2 编程界面
编程仿真界面的下半部分左侧为编程界面,编程界面上方为操作菜单,其中“工程”菜单,相当于其他应用程序的“文件”菜单。
只有在编程状态下,才能使用“工程”菜单进行打开、保存等操作。
编程界面两侧的垂直线是左右母线,之间为编程区。
编程区中的光标,可用鼠标左键单击移动,也可用键盘的四个方向键移动。
光标所在位置,是放置、删除元件等操作的位置。
仿真运行时,梯形图上不论触点和线圈,蓝色表示该元件接通。
受软件反应灵敏度所限,为保证可靠动作,对各元件的驱动时间应不小于0.5s。
§2.1.3显示操作界面
编程仿真界面的下半部分右侧依次为I/O状态显示画面、模拟灯光显示画面和模拟开关操作画面。
I/O状态显示画面,用灯光显示一个48个I/O点的PLC主机的某个输入或输出继电器是否接通吸合。
模拟灯光显示画面,其模拟电灯已经连接到标示的PLC输出点。
模拟开关操作画面,其模拟开关已经连接到标示的PLC输入点,PB为自复位式点动常开按钮,SW为自锁式转换开关,面板的“OFF ON”系指其常开触点分断或接通。
§2.1.4 编制程序和仿真调试
点按“梯形图编辑”进入编程状态,该软件只能利用梯形图编程,并通过点按界面左下角 “转换程序”按钮或F4热键,将梯形图转换成语句表,以便写入模拟的PLC主机。
但是该软件不能用语句表编程,也不能显示语句表。
编程界面下方显示可用鼠标左键点击的元件符号,如图2-2所示。
常用元件符号的意义说明如下:
元件符号下方的F5—F9等字母数字,分别对应键盘上方的编程热键,其中大写字母前的s表示Shift+;c表示Ctrl+;a表示Alt+。
1. 元件放置方法
梯形图编程采用鼠标法、热键法、对话法和指令法均可调用、放置元件。
(1) 鼠标法:
移动光标到预定位置,鼠标左键单击编程界面下方的触点、线圈、指令等符号,弹出元件标号对话框,输入元件标号、参数或指令,即可在光标所在位置放置元件或指令。
(2) 热键法:
点按编程热键,也会弹出元件标号对话框,其他同上。
(3) 对话法:
在预定放置元件的位置双击鼠标左键,弹出元件对话框,点击元件下拉箭头,显示元件列表,见图2-3。
选择元件、输入元件标号,即可放置元件和指令。
(4) 指令法:
如果对编程指令助记符及其含义比较熟悉,利用键盘直接输入指令和参数,可快速放置元件和指令。
编程常用指令,请参考本文第11页,“表2-2 PLC编程常用指令”。
例如:
输入“LD X1”,将在左母线加载一个X1常开触点;输入“ANDF X2”,将串连一个下降沿有效的X2常开触点;输入“OUT T1 K100”,将一个10s计时器的线圈连接到右母线。
2. 编程其他操作
(1) 删除元件 点按键盘Del键,删除光标处元件;点按回退键,删除光标前面的元件;垂直线段的放置和删除,请使用鼠标法。
(2) 修改元件 鼠标左键双击某元件,弹出元件对话框,可对该元件进行修改编辑。
(3) 右键菜单 单击鼠标右键,弹出右键菜单如图2-4所示,可对光标处进行撤销、剪切、复制、粘贴、行插入、行删除等操作。
3. 程序转换、保存及写入等操作
鼠标左键点击“转换程序”按钮,进行程序转换。
此时如果编程区某部分显示为黄色,表示这部分编程
有误,请查找原因予以解决。
鼠标左键点击“工程/保存” ,选择存盘路径和文件名,进行存盘操作。
鼠标左键点击“工程/打开工程” ,选择路径和文件名,调入原有程序。
鼠标左键点击“PLC写入”,将程序写入模拟的PLC主机,即可进行仿真试运行,并根据运行结果调试程序。
§2.2 PLC编程要点和基本原则
1. 梯形图和I/O接线图中继电器触点的状态
梯形图中所显示的继电器触点分合状态,均为继电器线圈未得电、继电器释放时触点的平常状态;I/O接线图中显示的外部信号开关触点分合状态,均为开关未受外力时的平常状态。
总之,梯形图或接线图中触点的通断状态均为“常态”。
设计梯形图,尽量使各继电器在初始状态下处于释放状态,便于程序设计和分析。
2. PLC输入接口和输入继电器X(8进制)
(1) PLC的输入接口,外部连接信号开关,内部连接输入继电器的线圈,将外部控制信号引入,由内部DC24V电源供电。
(2) 输入继电器的线圈仅受外部所连接的信号开关触点的控制,不受内部程序控制。
(3) 只有输入继电器的线圈,受外部开关触点驱动,其他任何软元件,都不受外部开关触点驱动。
(4) 输入继电器的线圈及外部信号开关一一对应,梯形图中仅显示其触点,而不显示其线圈。
(5) 每组标号相同的输入继电器的触点,必定对应一个外部信号开关触点。
(6) 输入继电器的常开触点的分合状态,及对应的外部信号开关触点的分合状态相同,而输入继电器的常闭触点及之相反。
(7) 设计I/O接线图,外部信号开关尽量采用其常开触点,这样PLC初始状态下,内部输入继电器为释放状态,其触点为“常态”,及梯形图显示的触点状态一致,便于程序分析。
如采用信号开关的常闭触点,则初始状态下内部输入继电器的触点为“动作状态”,及梯形图显示的触点状态相反,分析梯形图时需特别留意。
(习题1)
PLC输入接口电路示意图见图2-3(省略PLC内部元件和连线,即为I/O接线图)。
3. PLC输出接口和输出继电器Y(8进制)
(1) PLC的输出接口,外部连接接触器、电磁阀的线圈等输出执行部件,内部连接输出继电器的常开输出触点,将内部控制信号送出,由外部电源供电。
(2) PLC输出端外部所连接的输出执行部件,仅仅受内部输出继电器的常开输出触点控制。
(3) 只有输出继电器的输出触点,能够向外输出控制信号,其他任何软元件都不能向外输出控制信号。
(4) 输出继电器的常开输出触点,及外部输出执行部件一一对应,梯形图中仅显示其线圈,而不显示该触点。
(5) 每个独立动作的输出执行部件,对应一个内部输出继电器的常开输出触点。
(6) 输出执行部件的受电情况,及对应的输出继电器的线圈受电同步变化。
PLC输出接口电路示意图见图2-3。
(习题1)
4. 辅助继电器M
M0—M499是通用辅助继电器。
辅助继电器只能用于程序内部,用来扩充触点数目、完成相应的转换,不能及外部信号开关和输出执行部件直接发生联系。
(习题2)
常用特殊辅助继电器的作用,见本文第12页,“常用特殊辅助继电器功能简介”。
5. 继电器自锁
继电器的常开触点,及继电器启动按钮相并联,可保持继电器的吸合状态,称为自锁。
连续运行控制需设置自锁电路。
(习题3)
6. 继电器互锁
两个继电器各自的常闭触点,及对方继电器线圈相串联,可保证双方不会同时吸合,称为互锁。
电动机换向运行对调两条电源线,需设置互锁电路,以防止电源短路。
(习题5)
7. 计时器 T
T0—T199是通用计时器,计时值是K值的0.1倍。
通用计时器统计线圈加电的时间,到时间吸合。
通用计时器要点:
加电计时,断电丢失,复电重计,到时吸合,失电释放。
通用计时器启动时无法自锁,如有必要,可借助输出继电器或辅助继电器的自锁,向计时器线圈连续供电。
8. 计数器 C
C0—C99是通用加计数器,计数值为K值。
计数器统计线圈的加电次数,到次数吸合。
通用加计数器要点:
加电计次,到次吸合并保持,强制(RST)释放。
计数器吸合后具有自锁功能,因此计数器不必、也不得设自锁。
(习题9) 放置计时器和计数器线圈,切记输入K值,并及元件标号间留有空格。
9. 边沿驱动指令及触点
边沿驱动指令及触点,见第13页表2-2。
其中上升沿驱动指令xxxP功能是:
触点接通瞬间可驱动继电器瞬时吸合;下降沿驱动指令xxxP功能是:
触点分断瞬间可驱动继电器瞬时吸合。
(习题10)
10. 状态继电器S
S0--S9是初始状态继电器,S10—S499是通用状态继电器。
状态继电器的一个常开触点,作为步进顺序控制的步进接点。
由步进指令STL置位使状态继电器吸合,将接通的步进接点放置到左母线,形成副母线。
由SET指令转向新工步,则本工步步进接点分断。
步进顺序控制有关指令和用到的特殊辅助继电器,请参考本文第12页,“表2-1 步进控制中一个工步所包含内容”和“常用特殊辅助继电器功能简介”。
11. 母线连接
左母线仅连接继电器的触点、步进接点,不得连接继电器线圈。
触点之间可以并联、串联、混联(块电路)。
右母线仅连接继电器的线圈,不得连接继电器触点。
继电器线圈允许并联,但是不允许串联。
除去步进顺序控制程序,在一个程序中不允许重复出现同一个线圈(禁止双线圈输出)。
12. 触点块及块指令
多个继电器触点串连或者并联,组成触点块,应将触点块尽量安排在程序的前端,减少块指令的使用。
由块指令ANB或者ORB判断是块串联,还是块并联。
块指令xxB为触点块的终点,前面及之相邻的LD(LDI)为触点块的起点,二者之间为一个触点块。
xxB及LD(LDI)成对出现。
串联块前面由OR或ORB建立的垂直线段,看作是串联块起点的小母线。
13. PLC执行程序的顺序
用梯形图编制的PLC用户程序,转换成指令语句表时,将按照梯形图中各元件、指令的排列位置,遵循从上至下、从左至右的顺序依次转换,程序运行时,也是依此顺序扫描执行。
14. 顺序控制及步进指令
(1) 使用步进接点置位指令“SET Sn”,置位接通下一工步步进接点,同时将本工步的步进接点复位分断。
(2) 使用放置步进接点指令“STL Sn”,将上一工步置位接通的本工步步进接点放置到左母线,形成副母线。
副母线一则直接驱动线圈,也可连接触点或指令以驱动线圈,二则连接转移条件和转移指令“SET Sm”,构成一个完整的工步。
(3) 工步内驱动负载允许无条件输出、有条件输出、并行输出、纵接输出、置位(SET)输出。
(4) 工步内驱动负载不允许多路输出,但是允许无输出驱动,而仅有转移条件和转移方向。
- 12 -
(5) 步进程序结束,必须使用步进返回指令“RET”,撤销步进接点和副母线,将程序返回到左母线。
(6)“STL Sn”指令前必须有“SET Sn”指令。
(7) 步进顺序控制程序中,不同的工步,允许出现同一个线圈,但是相邻工步中不得使用相同的定时器,而相隔的工步中可以使用相同的定时器,节省定时器的用量。
15. 步进指令编程顺序
(1) 总原则先上下,再左右;
(2) 多个工步时,先工步之内,再工步之间;
(3) 工步之内先输出驱动,再转移; (4) 先无条件输出,再有条件输出。
16. 梯形图编程注意事项:
(1). 触点之间应紧密相连,否则转换后也会自动紧密相连。
(2). 垂直线段应及触点紧密相连,否则程序可能无响应或者报错。
(3). 输入元件标号,注意不要将数字0误为字母O。
(4). 输入定时器、计数器线圈,切记输入参数,而且标号和参数之间须留有空格。
(5). 指令和操作数之间需留有空格。
(6). 梯形图中的交叉线即为连接线,这点及电路图不同。
常用特殊辅助继电器功能简介
M8000:
PLC运行期间该继电器一直吸合,直接利用其触点。
M8002:
PLC运行开始该继电器瞬间吸合,直接利用其触点。
M8034:
该继电器被控吸合后,禁止全部输出。
M8040:
该继电器被控吸合后,禁止步进转移。
注:
1. 派生连接指令的xx系指连接指令的两位助记符简写;xxx系指连接指令的两
位或者三位助记符全写。
2. 基本指令语句格式:
<助记符> <元件> <参数>。
如 OUT T1 K50,意为驱动5s计时器T1。
3. 功能指令语句格式:
<助记符> <源元件> <目标元件>。
如 BCD C1 K1Y0,意为将C1中的数据变换成BCD码,传送到以Y0为首的1组4个元件中。
§2.3仿真练习
请遵循前面介绍的编程方法和编程规则,根据仿真练习题目提出的工艺要求,设计梯形图,并进行仿真调试。
题目后面的编号,是仿真软件的章节编号,也是满足题目要求的仿真现场工艺过程和工艺条件所在的章节,请在编号所在的仿真软件章节下编制程序、仿真调试。
§2.3.1基本控制程序编程仿真练习
所谓基本控制程序,是指利用极少数元件,实现一个简单控制的程序。
任何一个复杂完整的控制程序,都是有多个基本控制程序有机组合而成,所以要熟练掌握基本控制程序。
01点动控制B3 按下PB2,红灯亮,绿灯灭;抬起PB2,红灯灭,绿灯亮。
(提示:
X21常开触点控制Y0,X21常闭触点控制Y1)
02辅助继电器应用B3 借助辅助继电器实现第1题要求。
(体会继电器线圈吸合、释放,及常开、常闭触点动作的关系)
03启动及停止B3 按下PB2,红灯点亮;抬起PB2,红灯不得熄灭;点动PB1,红灯熄灭。
(要点:
继电器自锁控制)
04置位及复位B3 利用置位指令SET和复位指令RST,实现第3题要求。
05互锁控制B3 点动PB2,红灯常亮,绿灯不能点亮;点动PB3,绿灯常亮,红灯不能点亮;点动PB1,灯光熄灭。
(要点:
继电器互锁控制,电动机正反转换向运行,必须设置互锁控制)
06延时接通B3 点动PB2,3s后红灯常亮;点动PB1,灯光熄灭。
(体会计时器计时必须连续供电,断电清零)
07延时分断B3 点动PB2,红灯常亮;3s后自动熄灭。
08间歇控制B3 点动PB2,红灯点亮5s,熄灭5s循环;点动PB1,停止工作。
09计数控制B3 点动PB2五次,红灯常亮;点动PB1,灯光熄灭。
(体会计数器断电保持,必须用RST强制清零)
10边沿驱动B3 按下PB2,由触点上升沿驱动,使红灯常亮;抬起PB3,由触点下降沿驱动,使绿灯常亮;点动PB1,停止工作。
(重点体会后沿驱动的效果)
11单键控制B3 使用线圈交替控制指令,实现单键控制。
点动PB2,红灯点亮;再次点动PB2,红灯熄灭;如此循环。
§2.3.2应用程序编程仿真练习
将上述基本控制程序有机组合,可以构成较为复杂控制程序。
12交替亮灯计数B3 点动PB2,红绿灯交替点亮各5s;重复5次,停止工作。
点动PB1紧急停止。
(课本P61-16 要点:
间歇控制)
13分别控制B3 用PB2和PB3分别点亮红、绿灯,用PB1关闭;用PB4同时点亮红绿灯,用PB1关闭。
(课本P68-23)
14客人呼叫系统D1 客人点动桌面按钮,对应的指示灯常亮,值班室PL4同时点亮;点动值班室PB1,各灯熄灭复位。
(要点:
自锁控制)
15手动顺序启动同时停止B4 由PB2、PB3、PB4顺序启动红、绿、黄三灯转动;点动PB1,三灯同时熄灭。
(课本P67-17 要点:
顺序控制)
16自动顺序启动同时停止B4 点动PB2,红灯转动;5s后绿灯转动。
再过6s两灯同时停止。
点动PB1,紧急停止。
(课本P68-24 要点:
定时和顺序控制)
17手动输送A3 点动PB2,输送带连续运转;点动PB3,机器人供料;点动PB4,机械臂推料;点动PB1,停止工作。
(要点:
点动和连续控制)
18自动输送A3 点动PB2,输送带运转,机器人供料;部件到达X0处,输送带停止机械臂推料。
以后自动循环供料、推料。
点动PB1,停止工作。
19自动计数输送B4 点动PB2,绿灯转动,机器人连续供料,输送带送料;送料5件,停止运转,蜂鸣器响,红灯转动;点动PB1,紧急停车和停止鸣响。
(提示:
为了避免最后一个部件停留在输送带上,请利用下降沿触发指令PLF,或者定时器延时)
20输送带试验B4 点动PB2,输送带正转3s,绿灯转动,停止2s;然后输送带反转3s,黄灯转动,停止2s。
如此循环共30s,试验时间到,停止运转,红灯转动并且鸣响。
点动PB1,紧急停车和停止鸣响。
(课本P67-22)
21四组抢答器B4 PB1—PB4为各组的抢答按钮,PL1—PL4为各组指示灯,任意一组抢答后本组灯亮,响铃3s,其他组再按钮无效。
SW1为主持人复位开关。
(课本P68-25 要点:
互锁控制)
§2.3.3步进顺控指令编程仿真练习
对于更加复杂的控制过程,可利用步进顺控方式编程,将一个复杂的控制过程分解成多个简单的控制过程,每个工步完成一个小的程序,最终实现总的控制要求。
步进控制的优点是每个工步相对独立,编程思路清晰。
本章节的第22、23、24题,分别及前面的第8、18、19题,控制结果完全相同,请比较基本指令编程和步进指令编程,编程指导思想的不同之处。
步进顺序控制编程有关指令和应用到的特殊辅助继电器,请参考本文第10页,“表2-1 步进控制中一个工步所包含内容”和“常用特殊辅助继电器功能简介”。
22延时关门C1 点动PB2,绿灯亮,大门升起;大门全部开启,绿灯灭红灯亮;5s后黄灯亮,大门下降关闭。
23步进循环启动及停止C3 点动PB2,开始工作,红灯点亮5s,熄灭5s循环。
点动PB1,立即灭灯。
24自动计数输送B4 点动PB2,绿灯转动,机器人连续供料,输送带正转;送料5件,停止运转,蜂鸣器响,红灯转动;点动PB1,紧急停车和停止鸣响。
(提示:
为了避免最后一个部件停留在输送带上,请利用下降沿接通指令。
)
25输送带试验B4 点动PB2,输送带正转、绿灯亮3s,停止2s;然后输送带反转、黄灯亮3s,停止2s。
如此循环共30s,试验时间到,停止运转,红灯亮并响铃。
点动PB1,紧急停车停止响铃。
(课本P67-22)
26三
 升级会员
升级会员 