完整word版单回路负反馈控制系统的设计.docx
《完整word版单回路负反馈控制系统的设计.docx》由会员分享,可在线阅读,更多相关《完整word版单回路负反馈控制系统的设计.docx(10页珍藏版)》请在冰点文库上搜索。
完整word版单回路负反馈控制系统的设计
单回路负反馈系统
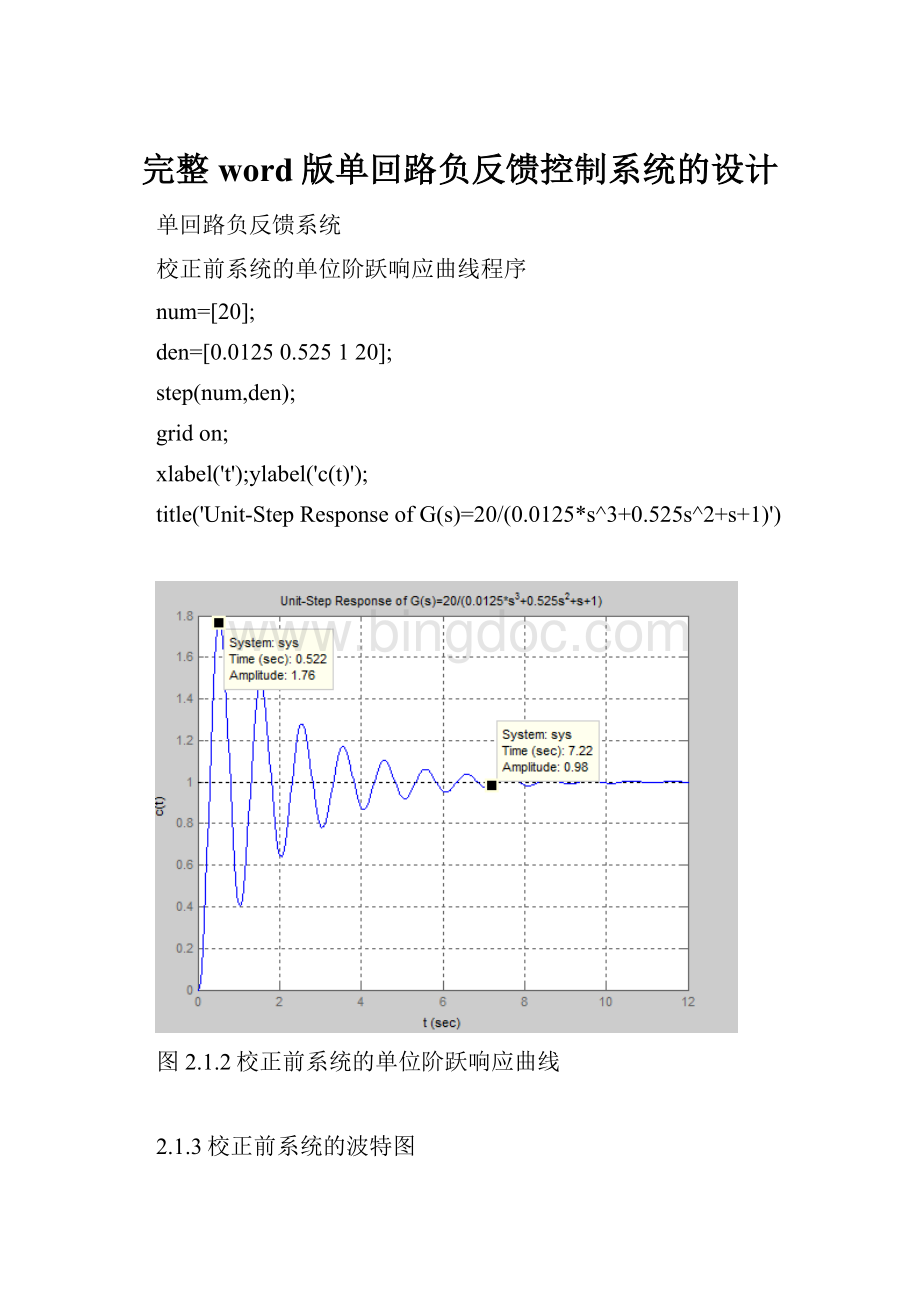
校正前系统的单位阶跃响应曲线程序
num=[20];
den=[0.01250.525120];
step(num,den);
gridon;
xlabel('t');ylabel('c(t)');
title('Unit-StepResponseofG(s)=20/(0.0125*s^3+0.525s^2+s+1)')
图2.1.2校正前系统的单位阶跃响应曲线
2.1.3校正前系统的波特图
校正前波特图程序
num=[20];
den=[0.01250.5251];
w=logspace(-2,3,100);
bode(num,den,w);
gridon;
title('BodeDiagramofG(s)=20/[s*(0.5s+1)*(0.025s+1)]')
图2.1.3校正前的波特图
校正前根轨迹图程序
K=20;
Z=[];
P=[0-2-40];
[num,den]=zp2tf(Z,P,K);
rlocus(num,den);
V=[-452-2525];
axis(V);
TITLE('Root-locusplotofG(s)=4.08(0.432s+1)/[s(0.088s+1)(0.5s+1)(0.025s+1)]');
xlabel('Re');
ylabel('Im');
图2.1.1校正前根轨迹图
图2.1.4校正前的仿真图
图2.1.5校正前的仿真阶跃响应曲线
校正后系统的单位阶跃响应曲线
num=[01.76264.0800];
den=[0.00110.05870.61302.76264.08];
step(num,den);
gridon;
xlabel('t');ylabel('c(t)');
title('jlyC(s)/R(s)=20*0.204*(0.432*s+1)/((0.088*s+1)*(0.0125*s^3+0.525s^2+s+1)+20*0.204*(0.432*s+1))');
图2.3.3校正后系统的单位阶跃响应曲线
2.3.4校正后的波特图
校正后波特图程序
num=[1.76264.0800];
den=[0.00110.05870.61301.00000];
bode(num,den);
gridon;
title('jlyC(s)/R(s)=20*0.204*(0.432*s+1)/((0.088*s+1)*(0.0125*s^3+0.525s^2+s+1)+20*0.204*(0.432*s+1))');)
图2.3.4校正后波特图
图2.3.5校正后的仿真图
图2.3.6校正后的仿真图
校正后根轨迹图程序
K=4.08;
Z=[-1/0.432];
P=[0-1/0.088-2-40];
[num,den]=zp2tf(Z,P,K);
rlocus(num,den);
V=[-452-2525];
axis(V);
TITLE('Root-locusplotofG(s)=4.08(0.432s+1)/[s(0.088s+1)(0.5s+1)(0.025s+1)]');
xlabel('Re');
ylabel('Im');
图2.3.2校正后的根轨迹图
图3.1.3校正装置的仿真图
图3.1.4校正装置的阶跃响应仿真图
校正装置的仿真图及频率特性图
图3.1.1校正装置的解阶跃响应曲线图
图3.1.2校正装置的波特图
 升级会员
升级会员 