无刷直流电机结构.docx
《无刷直流电机结构.docx》由会员分享,可在线阅读,更多相关《无刷直流电机结构.docx(23页珍藏版)》请在冰点文库上搜索。
无刷直流电机结构
1.磁回路分析法
V
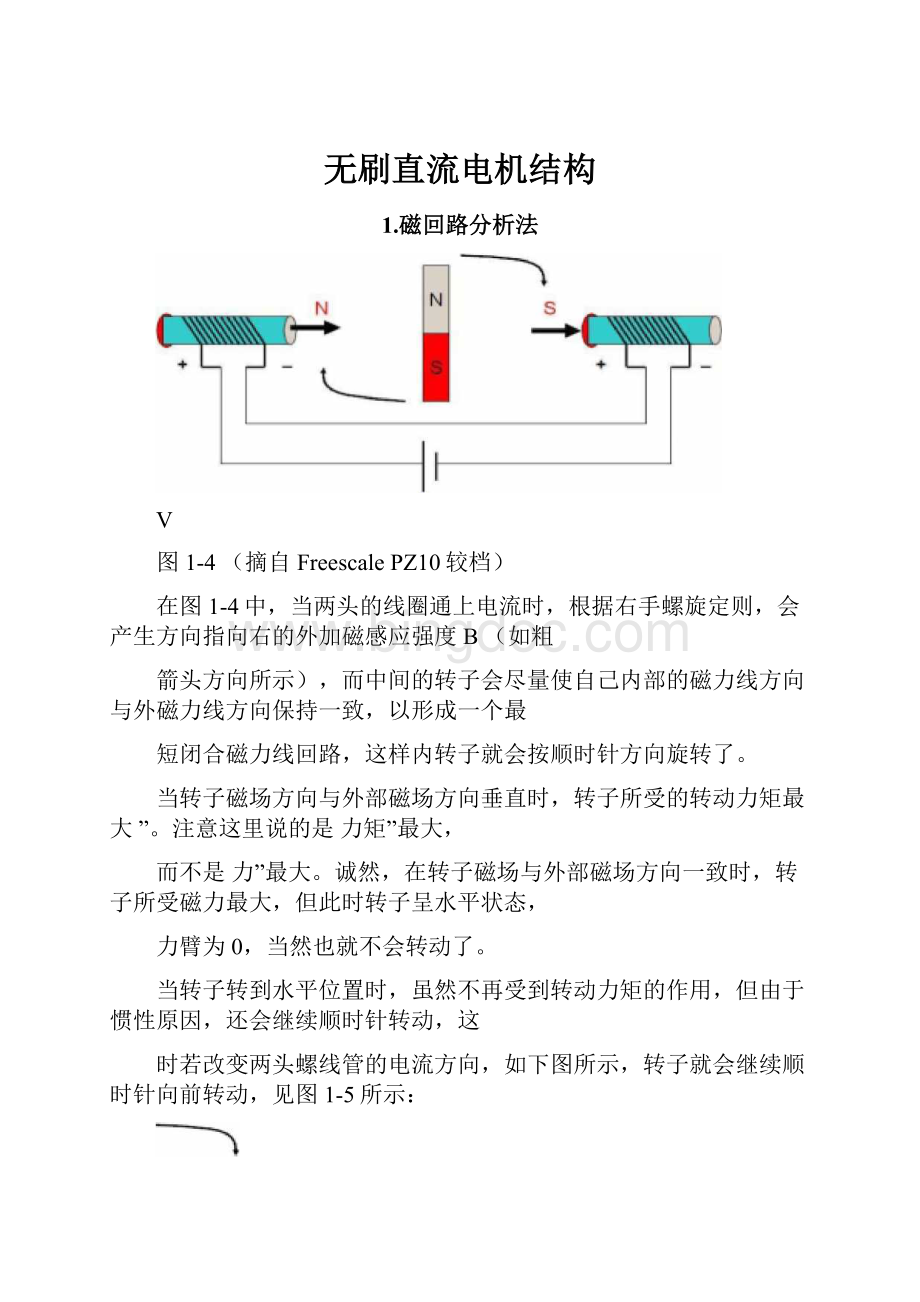
图1-4(摘自FreescalePZ10较档)
在图1-4中,当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗
箭头方向所示),而中间的转子会尽量使自己内部的磁力线方向与外磁力线方向保持一致,以形成一个最
短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大”。
注意这里说的是力矩”最大,
而不是力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,
力臂为0,当然也就不会转动了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这
时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,见图1-5所示:
SN
V
图1-5(摘自FreescalePZ10较档)
如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做
换相(commutation)。
注意:
何时换相只与转子的位置有关,而与转速无关。
以上是两相两级无刷电机的工作原理,,下面我们来看三相两极无刷电机的构造。
2.三相二极内转子电机结构
定子三相绕组有星形联结方式和三角联结方式,而三相星形联结的二二导通方式”最常用。
Starconnection
图1-6(修改自FreescalePZ104文档)
图1-6显示了定子绕组的联结方式(转子未画岀),三个绕组通过中心的连接点以“Y”的方式被联结在一起。
整个电机就引出三根线A,B,G当它们之间两两通电时,有6种情况,分别是AB,AC,BC,BA,CA,CB图1-7(a)〜(f)分别描述了这6种情况下每个通电线圈产生的磁感应强度的方向(红、兰色表示)和两个线圈的合成磁感应强度方向(绿色表示)。
在图(a)中,AB相通电,中间的转子(图中未画岀)会尽量往绿色箭头方向对齐,当转子到达图(a)中绿色箭
头位置时,外线圈换相,改成AC相通电,这时转子会继续运动,并尽量往图(b)中的绿色箭头处对齐,当转
子到达图(b)中箭头位置时,外线圈再次换相,改成BC相通电,再往后以此类推。
当外线圈完成6次换相后,
内转子正好旋转一周(即360。
)。
再次重申一下:
何时换相只与转子位置有关,而与转速无关。
图1-8中画岀了换相前和换相后合成磁场方向的比较与转子位置的变化。
一般来说,换相时,转子应该处于,比与新的合成磁力线方向垂直的位置不到一点的钝角位置,这样可以使产生最大的转矩的垂直位置正好处于本次通电的中间时刻。
图1-8换相前和换相后的情形(摘自FreescalePZ104文档)
3.三相多绕组多极内转子电机的结构
搞清了最简单的三相三绕组二极电机,我们再来看一个复杂点的,图1-9(a)是一个三相
九绕组六极(三对极)内转子电机,它的绕组连线方式见图1-9(b)。
从图(b)可见,其三相绕
组也是在中间点连接在一起的,也属于星形联结方式。
一般而言,电机的绕组数量都和永磁
极的数量是不一致的(比如用9绕组6极,而不是6绕组6极),这样是为了防止定子的齿与转
子的磁钢相吸而对齐,产生类似步进电机的效果,此种情况下转矩会产生很大波动。
3polepairs
(a)电机定子与转子结构(b)绕组联结方式(摘自5iMX论坛)
图1-9三相9绕组3对极内转子无刷直流电机结构
的运动趋势。
图1-10给出了一个对齐的运动趋势的图例。
3polepairs
9coils
图1-10某2相通电时的转子磁极和定子磁极对齐运动的最终位置
无刷直流电机转矩的理论分析
1•传统的无刷电机绕组结构
1-17。
其线圈形状见图1-16,线圈包围整个转子。
电机三相绕组示意图见图
图1-17中为简略示意起见,每相只画出了一个线圈,其实每相应该有
N匝线圈。
其绕组联结方式为:
A
r
B
nA
270
■le^id
/
Moilan
2.转子磁场的分布情况
非常陡峭,梯形波”就变成了方波”根据右手定则E=BLV的公式,在匀速转动下,各绕组
B'、C端通过星形联结在一起,AB、C为电机的三根引出线。
无刷直流电机定子绕组结构如下
大,然后一直保持恒定值不变,直到B点开始下降,到180°的时候下降到零。
然后开始负向增长,在C
图1-19转子磁感应强度分布情况
与此类似,上文提到的另一种正弦波”电机就是一种磁感应强度呈正弦波图形分布的直流无刷电机,也叫
永磁同步电机。
这种电机的绕组结构和我们的梯形波电机的绕组结构不太相同,进而驱动方式也不太相同,
需要用到矢量分析法,由于本文只关注于梯形波的无刷直流电机,故对这种正弦波电机不展开讨论了。
3、转子的受力分析
在图1-20(a)中,AB相通电,电流处于转子产生的磁场内,根据左手定则,我们判断线圈AA'中的上半
部导线A受到一个顺时针方向的电磁力,而AA的下半部导线A'也受到一个顺时针方向的电磁力。
由于线圈
绕组在定子上,定子是固定不动的,故根据作用力与反作用力,定子绕组AA会施加给转子一个逆时针方向
的反作用力,转子在这个力的作用下,就转起来了。
同理,与AA'的情况类似,BB'也会对转子产生一个逆
时针的反作用力。
当转子逆时针转过60°后,到达图1-20(b)的位置,这时线圈BB'已经到达转子磁极的边缘
位置了,再转下去就要产生反方向的力了,所以这时就要换相,换成AC相通电,见图1-20(c)。
这样,每过
60°换相通电,转子就可以一直转下去了
4.
一种近似分析模型
实上,磁力线总是倾向于沿磁阻最小的路径前进,其实并不穿过导线,见下图
图1-21磁力线分布
N匝线圈现都简化成了一
现仍以新西达2212电机为例,为了方便说明问题,每个绕组的
个,而且我们对所有绕组和磁极都做一了个编号,见图1-22。
AB相通电时,A1-1导线处在N极下,根据左手定则,受到一个顺时针方向的作用力,即
同时施加给转子一个逆时针方向的反作用力。
同时,A1-2导线处于S极下,但电流方向与A1-1
相反,所以还是会施加给转子一个逆时针方向的作用力。
图1-22新西达2212电机AB相通电时情形
换相与调速
1.换相基本原理
(1)转子位置与过零检测
前面已经唧唧歪歪过很多遍了,换相的时机只取决于转子的位置,那顺理成章的问题就
是:
转子的位置怎么测
一种比较简单的方式是用光电编码盘,这个东西在工业上用得比较多。
不过由于其价格
比较贵,而且还要接联轴器等一堆乱七八糟的东西,分量也不轻,显然不适合我们做四轴用。
外叫m
图1-23一种4位二进制编码盘
霍耳效应测量器件可以根据转子不同位置时的不同磁场方向分布情况,而给岀1或0的输岀,一般在电
机的不同位置上装三个霍尔传感器,就可测岀转子的位置。
这就是所谓的有感无刷电机的驱动”。
接下来
就是我们本文要主讲的无感”测量方式。
无传感器怎么测量答:
利用第三相的感生电动势。
无感驱动方式
的优点在于省略了三个霍尔传感器,整套系统分量更轻,结构更简单。
回过头再去看图1-20,先看图(a)和
图(b),在AB通电期间,你会发现线圈CC的C边在图(a)中切割N极的磁力线并产生一个正向的感生电动势,
在图(b)中确是切割S极的磁力线而产生一个反向的感生电动势了;C边的情况也类似。
(这里我们定义:
在
电路图见图1-25。
图1-25AB相通电期间线圈AA和BB的等效电路
图1-24六种通电情形下各绕组的电流和感生电动势
从图1-25可以看出,线圈绕组AA和BB上产生的反电动势是很大的,两个加起来几乎略小于12V。
为什么呢,
因为线圈绕组本身的等效电阻很小(约欧左右),如果反电动势不大的话,端电压加载在线圈绕组等效电阻上,会产生巨大的电流,线圈非烧掉不可。
为方便理解,我们姑且假设在额定转速下AA和BB各产生的
反电动势,那么它们串联起来就产生的反电动势,结合图1-25看,那么加载在等效电阻上的电压就为V,最
终通过绕组AB的电流就是,看来这个假设还是比较合理的。
同理,由于各绕组的结构是相同的,切割磁力线的速度也是相同的,所以线圈CC也应该会产生一个大小约为的感生电动势;不同的是:
在AB相通电期间,
CC的感生电动势会整个换一个方向,也即所谓的过零点”
在图1-24的tO时刻(即图1-20(a)的位置),为AB相通电刚开始时的情况,CC产生的感生电动势的等效
电路图如图1-26(a)所示;而在图1-24的t1时刻(即图1-20(b)的位置),为AB相通电快结束时的情况,CC产
(a)to时刻的等效电路图
图1-26AB相通电期间CC的感生电动势
由于中点电势值始终为6V,CC的线圈产生的感生电动势只能在以中点6V电势为基准点的基础上叠加,
仍旧假设在额定转速下CC上会产生的感生电动势,那么在to时刻,如果我们去测量C点的电压,其值应为;在t1时刻,C点的电压值应为。
=也就是说,在AB相通电期间,只要一直监测电机的C引线的电压,一旦发现它低于6V,就说明转子已转过30°到达了t0和t1中间的位置,只要再等30°就可以换相了。
如果电调的MCU足够快的话,可以采用连续AD采样的方式来测量C点电压,不过貌似有点浪费,因为大部分采到的AD值都
是没用的,我们只关心它什么时候低于6V。
这时候模拟比较器的作用就来了,它天生就是干这个活的料。
比较器的联结电路图见图1-27。
一旦C相输出电压低于6V,比较器马上可以感知并在输出端给出一个下降沿。
同理,当电机处于AC相通电时,监测的是B相输出电压;当电机处于BC相通电时,监测的是A相输出电压。
继续往前,当电机开始进入BA相通电时,C相输岀电压一开始会处于一个较低的状态(),过零事件发生时,
C相输出电压会超过6V,也就是说,这时比较器会感知并输出一个上跳沿。
接下来的CA,CB相通电情况也
类似,不再赘述。
图1-27比较器的电路图
可能有人会说,这可是15V的比较器哪,单片机自带的比较器一般只支持最高5V的比较啊。
事实上,
上面这个电路图只是为了方便说明问题,在真正的实用中,会对C相输出电压和6V中点电压再加个分压电路,
而且中点电压也不总是等于6V,这个留待第二章再作详细分析。
(2)换相策略
另一个问题是,就算检测到了C相的过零点,那还要等转子转过30°才可以换相,转这剩下的30°究竟要花多少时间
一种比较简单的做法是近似认为转子转速在这0°~60°的小范围区间内基本是恒定的:
从AB相开始通
电到检测出C相过零的前半段时间,基本等于后半段的时间。
所以只要记录下前半段的时间间隔T1,等过零事件出现后再等待相同的时间,就可以换相了。
另一种比较暴力的做法是检测到过零事件后,也不再等转子再转30°了,立马就换相,事实上德国MK项目的BL-Ctrl电调程序就是这么干的。
我们来看看这样做会有
什么后果:
图1-28(a)同图1-20(a),为AB刚开始通电时的情况。
转过30°后,至U达图(b)的位置时,检测到C相过零,如果此时立刻换相为AC导通,将成为图(c)的状态。
这时,CC线圈还处于NS极的交界处,此时穿过CC的磁感应强度为零,CC上将不产生电磁力。
也就是说此时只有线圈AA在出力,CC处于出工不出力的状态。
不
过这个情况只是瞬时的,只要转子稍微向前再转一点,穿过C和C的磁感应强度就会开始增加,CC就会开始
出力。
回忆一下图1-19,如果梯形波电机工艺做得比较好,磁感应强度上升和下降直线比较陡峭的话,穿过CC的磁感应强度将很快达到最大值,期间损失的效率很小。
如果电机的工艺做得一般般,上升和下降直线比较平缓的话,就会多损失一点效率,电机输出转矩的波动也会大一点。
接着往下看,当转子继续转过30°至肚图(d)的位置时,一切都好,相安无事。
当转子再转过30°到达图(e)的位置时,会检测到B相的过
零事件,此时如果立刻换相成BC相通电,将成为图(f)的状态,刚导通的BB线圈照例会处于星期一综合症”的状态,效率很低、出工不出力,要再过一会儿才能进入最佳工作状态。
综上所述,暴力换相的方法也是可以用的,只不过损失一点效率。
除了首次换相是间隔30°外,以后
的每次的换相间隔也都是60°,转子旋转一周也是换6次相。
如果有时间的话,我会做一个测试实验,比较采用以上两种不同换相策略时的电机功耗情况,测试结果将放于后续附录中。
Ai
2
O
o
A+
A■
AvR
⑻AB相开始通电
(b)转过30
(c)AC相通电
(d)转过30°
(e)转过30°
(f)BC相通电
图1-28暴力换相时各情景的分析
3.调速
无刷直流电机,无论其换相模式多么复杂,一些控制方式和交流同步电机多么相似,
但从本质上来讲,
还是属于直流电机。
只不过将原来有刷直流电机的机械换向器,改成了现在的电子换相器。
直流电机怎么调速当然是用直流电压来控制。
电压越高,转得越快;电压越低,转得越慢。
不过遗憾
的是,单片机并不能输岀可调的直流电压,于是只好变通一下,用脉宽调制(
PWM)方式来控制电机的输
入电压。
PWM占空比越高,等效电压就越高,占空比越低,等效电压就越低。
当然,单片机给出的PWM波形只是控制信号,而且最高电压也只有5V,其能量并不足以驱动无刷直流
电机,所以必须要再接一个功率管来驱动电机。
功率管可以是
MOSFET(场效应管),也可以是IGBT(绝缘
栅双极晶体管)。
关于驱动电路的结构,我们将在下一章详细讲述。
2.无感无刷电调的驱动电路设计
电池电压监测电路
图2-1电池电压监测电路
图2-1是一个电阻分压网络,其中VCC接电源锂电池的正极,GND接电源锂电池负极,U_BAT接MEGA8
的ADC7通道,电容C17用来消除电源中的一些高频波纹的影响。
一节标准锂电池的电压为,一般航模用锂电池都是三节串联,也就是。
若电池即将用尽,VCC会下降,相应的U_BAT测得的电压也会下降。
不过
在MK项目的电调程序版本中,作者把监控电压的工作放在了主控板上,所以在整个电调程序中没有任何测量ADC7通道的代码,本模块基本属于鸡肋。
换相控制电路
换相控制电路主要由6个功率场效应管和一些外围电阻和三极管构成,虽然原理不复杂,但涉及到的相关知识还是蛮多的,所以要分几个部分讲。
1.六臂全桥驱动电路原理
为了清楚地说明问题,我们先将原图作一些简化
图2-2六臂全桥式驱动电路
Q1到Q6为功率场效应管,当需要AB相导通时,只需要打开Q1,Q4管,而使其他管保持截止。
此时,电流的流经途径为:
正极fQ1—线圈A—绕组B—Q4—负极。
这样,六种相位导通模式:
AB,AC,BC,BA,CA,分别对应的场效应管打开顺序为Q1Q4,Q2Q2,Q3Q2,Q3Q6,Q5Q6,Q5Q4Q1~Q6的每个场效应管旁边还并联着一个二极管,这是干什么用的,画蛇添足的设计么非也。
我们在第一章曾经提到,无刷直流电机的调速是用PWM波形的占空比来调,图2-2中,采用的是H_PWM--L_Oh方式来驱动的,也就是上臂采用PWM信号控制,而下臂常开的一种驱动方式。
比如在AB相导通时,单片机给Q1的栅极是PWM信号,而给Q4的栅极是常开信号,这样你就可以通过控制Q1输入端的PWM信号占空比来控制驱动电机的有效电压。
此时A端和B端的电压波形如图2-3的圆圈中所示(我们等会儿再讲C相电压是怎么回事)。
现在问题来了,A相的电压是可以突变的,但是由于电感的作用,流经AB线圈的电流是不能突变的。
你不给人家一条活路,人家是要造反的,这里所谓的造反就是线圈由于自身电感的作用产生极高的瞬时反电动势(回忆一下:
diULdt=)而击穿元器件。
所以这时候二极管的作用就来啦,在PWM信号的低电平期间,电流是按照图2-4所示的箭头路径续流的。
由于负极端电位强制为零,二极管有一个正向压降,A点的电压就可以在瞬间降到比零略小的值,与图2-3的实验结果相吻合。
图2-3各相电压波形
1,1
A
、
A
5二
1
*—
占
图2-4AB相续流期间电流方向
由于A点电位忽上忽下的变化,会导致ABC线圈的中点电位也会忽上忽下的变化(中
点电位总是等于A点和B点电位的平均值),我们来看看这样会对我们采样C点的反电动势有什么影响。
当PWM处于高电平期间,A点的电压值接近12V,中点的电压值接近6V,根据我们在第一章的分析,C线圈产生的感生电动势叠加在中点上,会在C点产生接近于12V
的电压值。
然后PWM进入低电平期间,A点电位迅速降到略小于零,中点电位也会迅速降到略小于零,这时C线圈的感生电动势就会以零为基点往上叠加,此时C点的电压就是略
小于6V,这个也可以在图2-3中得到验证。
虽然C点电压向下穿越了6V,但是回忆一下比较器的结构(见图2-5),由于中点电压和C点电压同时降低和升高,所以不管中点电位如何变化,只要C线圈本身的感生电动势不过零,比较器输出就不会产生跳变。
有人也许会问,
这个悬浮的中点电压是怎么测得的呢,又不能从中点引根线出来。
其实这是通过一个设计很巧妙的分压电路根据A点和B点的电压值估计出来的,这个放到下面的“反电势过零点检
测电路”一小节详讲。
图2-5比较器电路图
随着转子继续旋转,C线圈的感生电动势终将由正变负,而被比较器给感知到。
至于图2-3
的波形图中为什么没有C电压为负值的点,因为C端电压如果负得太厉害,Q2的二极管就
会导通,而将C端电位钳制在-1V左右。
C点理想的电压波形我想应该是这样的:
图2-6C点电压波形
2.功率场效应管的选择
(1)N型和P型MOSFET
上面的图2-2电路图对于理解换相原理来说,是可以用的,但在实际的电路中,是不能用的。
为什么呢问题于N型场效应管的门限开启电压V
先来复习一下场效应管的基本知识,图2-7(a)是一个N沟道型场效应管,图2-7(b)是一
个P沟道型场效应管。
N沟道场效应管有点类似于NPN三极管,只要栅源极间加一个正向
电压,并且其值超过数据手册上的阈值电压时,场效应管的D极和S极就会导通。
一般N
型功率型场效应管的V阈值电压都会在3~20V之间。
图2-7N型和P型场效应管
 升级会员
升级会员 