三维激光扫描仪工作流程.docx
《三维激光扫描仪工作流程.docx》由会员分享,可在线阅读,更多相关《三维激光扫描仪工作流程.docx(14页珍藏版)》请在冰点文库上搜索。
三维激光扫描仪工作流程
三维激光扫描仪应用于地形测量操作流程:
第一步、建立工程及数据下载
1.1新建工程:
点击工具栏"project”命令-“New”-选择工程在计算机中存贮位置并为工程命名;
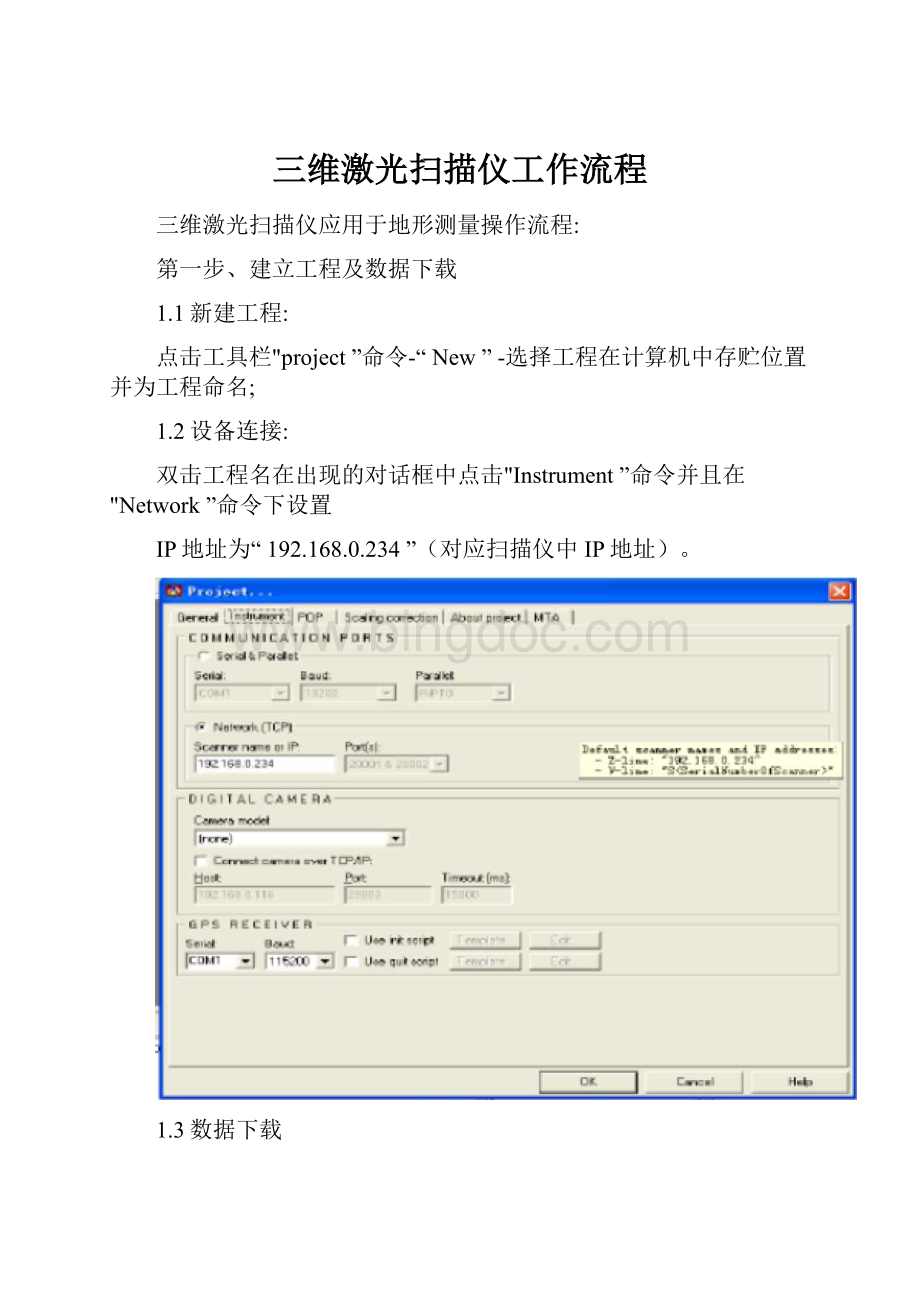
1.2设备连接:
双击工程名在出现的对话框中点击"Instrument”命令并且在"Network”命令下设置
IP地址为“192.168.0.234”(对应扫描仪中IP地址)。
1.3数据下载
点击工具栏"HELP”-“downloadandconvert”-选取需要的数据进行下载。
(可右键工程名称点”checkall”全选所有数据)第二步、选取反射片或公共点。
在新接触RIEGL扫描仪或无明显公共特征地物的情况下不建议运用选取公共点进行点云
数据的拼接,最好是每站摆设3个反射片来进行粗拼和坐标系的转换。
选取反射片一般在2D视图下灰度模式中的点云数据中选取
在反射片的中心点击右键,选择"createtiepointhere”输入点名称(点名称应便于记
住并且与选取的公共点区分开)
在2D视图中选取反射片后,可在3D视图中拖入标记的反射片来检查标记的反射片位置是
否正确,若发现反射片偏离,可在TPL中删除改点,在3D视图中重新选择。
第三步、导入外业实测反射片坐标(反射片坐标是用RTK测得)
FfiAJWI^||1VinTlIEfi"|illfIfa'"dtflgln1[存星血「・T■专■!
|■*FiaUI^b1b||i亍
29出」。
李坍喇谓百L冬H35**&iL
孑室诩口.'■:
匚■锲弄尹|軒口快■■$AfiF■甘|A.JX・■□鼻■■
如果我们是用选取公共点进行站站之间的粗拼,或用反射片进行粗拼,可以在TPL(GLCS)
中选取所有点右键,复制到TPL(PRCS)。
注意:
一般我们在野外作业时都是用磁罗盘进行定向配合GPS进行数据扫描,内业一般
就可以不用进行粗拼,第四步可以跳过,所以我们不用将TPL(GLCS)中的点复制到
TPL(PRCS)中。
第四步、粗拼
粗拼就是将站站之间的位置在一定的误差范围内重合。
粗拼有三种方法
一、在野外作业时都是用磁罗盘进行定向配合GPS进行数据扫描,相对位置不会发生
太大的变化,我们可以理解为已经粗拼完成。
某些个别站因为各种原因可能会发生相对位置变化很大的情况,我们可以通过改变某站扫描数据的X、Y、Z坐标进行粗拼。
例:
假设第一站(①)的点云数据相对位置正确,我们将第二站(②)的点云数据与
①的点云数据进行粗略拼接。
步骤为
将①②的点云数据放到一个视图窗口上,调整至较为清晰的公共部分
在右边的视图框中选中第二站的点云数据,右键选择
modifyorientation&
position”命令
二、通过扫描仪中反射片坐标TPL(socs)与RTK所测坐标进行点与点匹配进行粗拼
将RTK所测的TPL(GLCS)在每站的TPL里面选择TPL(GLCS)寻找“同名点”(和导入的控制点匹配)点到点,设置正确的容差和匹配点个数,如果无法匹配的时候首
先检查容差设置和匹配点数量的设置,如果还不行打开3D点云看选取的位置是否在
所要选取的位置上。
如果在这一站里没有找到这三个反射片可以通过手选3个公共点与有公共部分的站进行匹
配
三、手动拼接
在相关两站点云中分别选择至少三对同名点,通过每一站的TPL(SOCS)中的“寻
找同名点功能”与其他站进行拼接。
用此拼接方法时需注意设定一站为基础站,其他站一次往这站上拼,每进行一次粗
拼,就要马上做一次精拼(例如scanposOOl为基准站,首先在scanposOOl和
scanpos002的点云中选取至少三对同名点,然后在scanpos002的TPL中点击寻
找同名点,勾选scanposOOl站进行粗拼,之后马上对这两站进行精拼,然后在选
取scanpos003与scanpos002的同名点进行粗拼)。
注意:
手动拼接的方法可与之前两种粗拼方法混用,而粗拼方法一和二不得一起使用。
第五步精拼(多站点拼接)
max
5.1准备数据
在工具栏拼接命令下进行创建用于拼接的基础数据,设置参数(如果是做地形
5.2精拼
打开多站点拼接命令,锁定基础站,如果多站已拼接好需将拼好站锁定(拼好一站锁一站),在拼接过程中一定要一站一站拼
需要设置的参数(设置搜索半径,半径大小根据粗拼的结果来定;设置误差递减,幅度不要太大;)根据计算的结果重复设置更小参数直至达到最优结果;检查点云数据,看无明显分层即可。
第六步坐标转换
若采用每站三个反射片粗拼的方法(即粗拼方法二),首先需要删除TPL(prcs)里的所
有点,之后将每一站TPL(socs)中的点复制到TPL(prcs),打开TPL(prcs)进行点对点匹配(坐标转换)。
若没有才用三个反射片粗拼的方法,可直接将每一站TPL(socs)中的点复制到TPL
(prcs),打开TPL(prcs)进行点对点匹配(坐标转换)。
第七步数据分块
对于较大区域的测图,由于GPS误差、拼接误差等多方面因素的影响,外业所采集的
控制点在坐标转换过程中不可能完全应用,为了提高精度我们需要将数据分为几块,保证每
一块内采集的所有控制点都能在满足精度要求的情况下使用。
第八步数据合并和抽希
在OBJECTS里面的POLYDATA中右键新建一个POLYDATA文件,然后再出现的对话框中选择所要合并的文件,并在设置中点击octree命令在increment栏中确定抽希的间隔距离,勾选Conbine命令合并选择的数据。
上图为0.8平方的矿坑采集的点云数据
上图为左边为数据抽希后的数据右边为没有抽希的点云数据。
第九步剔除植被
打开合并好的数据,通过正视图、侧视图等删除躁点;部分选取数据,点击terrianfilter按钮,选择工程坐标系(GLCS)设置vegetation剔除植被、mining-object剔除矿上上
的物体、mining-pointsbelowterrain为剔除低于地面的点。
在运行剔除植被之后,所有
被计算机认为是植被的点将处于选择状态,在这当中通常会有一些坡坎点,我们需要手动的
将这些有用的点进行保留,进入选择状态,选择空五角星图标,手动选择需要保留的点。
对点云进行检查把不参与生成等高线的点(噪点、植被、房屋等)手动框选删除。
第十步选取地物点
为了在CAD中描图更加明显,我们通常选取原始点云中的地物进行绘制,打开有地物
点的原始点云数据,手动选择地物部分,用复制命令将这些点创建为一个新的polydata。
第十一步导出点云数据
在polydata中选取处理好的数据点击右键选取export命令-选择保存类型
1、选择ascii格式导出IDXYZ,加一列逗号当高程点导入CAD;
石甩帝应.悟比归畀2號M堆,-H礼出呂J
1,UbbU.4旳彩口曲fJ^lJ/b.J6S
L51閔陡一红4竝<5至一242J1L竟1
玄blt-bSt.0佗,妁匕_JtO.
J51品議一13E,434】5B2.9丑二九勺_3E8
b,blbtM.Q=W・电如飙4Jh,L^i.m
®51656E.啊434353?
.4S,L^L3T7
t,bit缶轧."Q・电如血・畑LJtl.Jty
8,El隔653X4341536.L耳二忍478
I'.口甜阻・址4別Ibzfb.他二如那
10.F165竺一1丸,48415^,5^5,LC2Z.W阳
1:
七】轴制■扎缶业4:
必卜・住缶1X^,4郭
12.=16563,717,1E410S&.1腕LHS.4關
13.El65€£・3E7.4E4153S.627.LC21.415
14.曰馬筲•翱X装兀去£俺匕LC2;.^3S
IE.El麻二珂葩4卫.1E7,1C20.4E0
1乩町碍徒.兀心佥*丐尊.170,LC21/237
r.E16K6.1E6t4IE415E4:
.319.LC20.774
15.ElftSFE.S^4E41554.LC2:
525
B.E1SESE.373.北4》翼”2E7.LC22.154
2fl.2凹,1&41553.5^7.LC22.MCI
21.E1G5GL^7,4F41554.窗.1C22.E铀
22.曰£旺匚Mg裝匸壬虹3(73,LC23.4J1C1
23'E1防輿.313,做拓.358.LC2:
^45
24上1収匚%4E41555.fE6,LC2:
.783
3^E1®E.374,4£4:
5^.2C2.LC2:
.E3F
2歸曰&誉E.SCZ1E41525.973,LC2:
l?
D0
2T.El陆化.752,4E415E4.BC9.LC22.£34
逼516M4.花勻装4•壬轧335,LC2?
.390
29.E1靄GE・3G6,4^41534.貳hLC23.^S2
凯曰£SR.3df,1^41524.3C4.LC13.220
31.El0571.210.4E413E6.4E&LC14,⑻
32.ElftCTl.276,1E41^&.逊LC15.C51
33.El&571.现业4卫.l£0.LC14.767
別.目陌门.並2曲盛乩3Cn,LC15^3fi
35.El0570.3E0,4E415E7.魁.1C15.485
36.=1(>571.277,1641527.亞9,LC15.PS4
3T.E1&571.5CCL4E4L52&.3C7.LC15.E5L
38.516571.7=7,4S41528,2C2,LC15.=55
30.EK573.7£C,业4AR.353.LC13.柬0
2,选择地物导出DXF格式可以作为底图加载进CAD进行画草图。
到此就可以把dat数据导入cass进行画图了。
(三维激光扫描仪自带单方相机取景画图遇到不清楚的地物可以提取照片作为参考)其他基本功能及操作
、点云附色
在原始点云数据上点击右键,选择colorfromimage,本站拍摄的照片将会附到点云
数据上,之后通过在视图中选却turecolor一项查看彩色点云数据。
二、生成DEM模型
打开剔除植被、地物点的点云数据(polydata),在右边窗口中选择全球坐标系,点击俯视
图,在视图中右键,"选择选择所有”,再次点击右键,“Triangulateplane
triangulate”,在弹出对话框中设置参数1、最大三角网边长(根据点云数据漏洞大小设置)
2、三角网与视角的角度(为了获得更多的三角网数据通常设置为90。
,无限制)3、最小三
角形内角(为了避免生成的三角网过于尖锐,通常需要给定一个最小三角形内角,但是为了
生成的三角网少有漏洞,通常设置此值为0)
三、动画制作
在VIEW文件夹中新创建一个视图窗口,在视图窗口中右键,选择createnew
animation,在视图中拖入需要的点云数据,在视图中旋转角度旋转合适位置后,点击add
position添加一帧,依此类推。
添加所有关键帧后,点击recorder命令中的record按钮,
开始渲染视频,此过程很长需耐心等待。
以上内容为简要介绍,需详细了解请查看相关视频和中文繁体版操作手册。
 升级会员
升级会员 