自转旋翼机的基本构造和基础学习知识原理1.docx
《自转旋翼机的基本构造和基础学习知识原理1.docx》由会员分享,可在线阅读,更多相关《自转旋翼机的基本构造和基础学习知识原理1.docx(18页珍藏版)》请在冰点文库上搜索。
自转旋翼机的基本构造和基础学习知识原理1
自转旋翼机的基本构造和原理
自转旋翼机的基本构造包括:
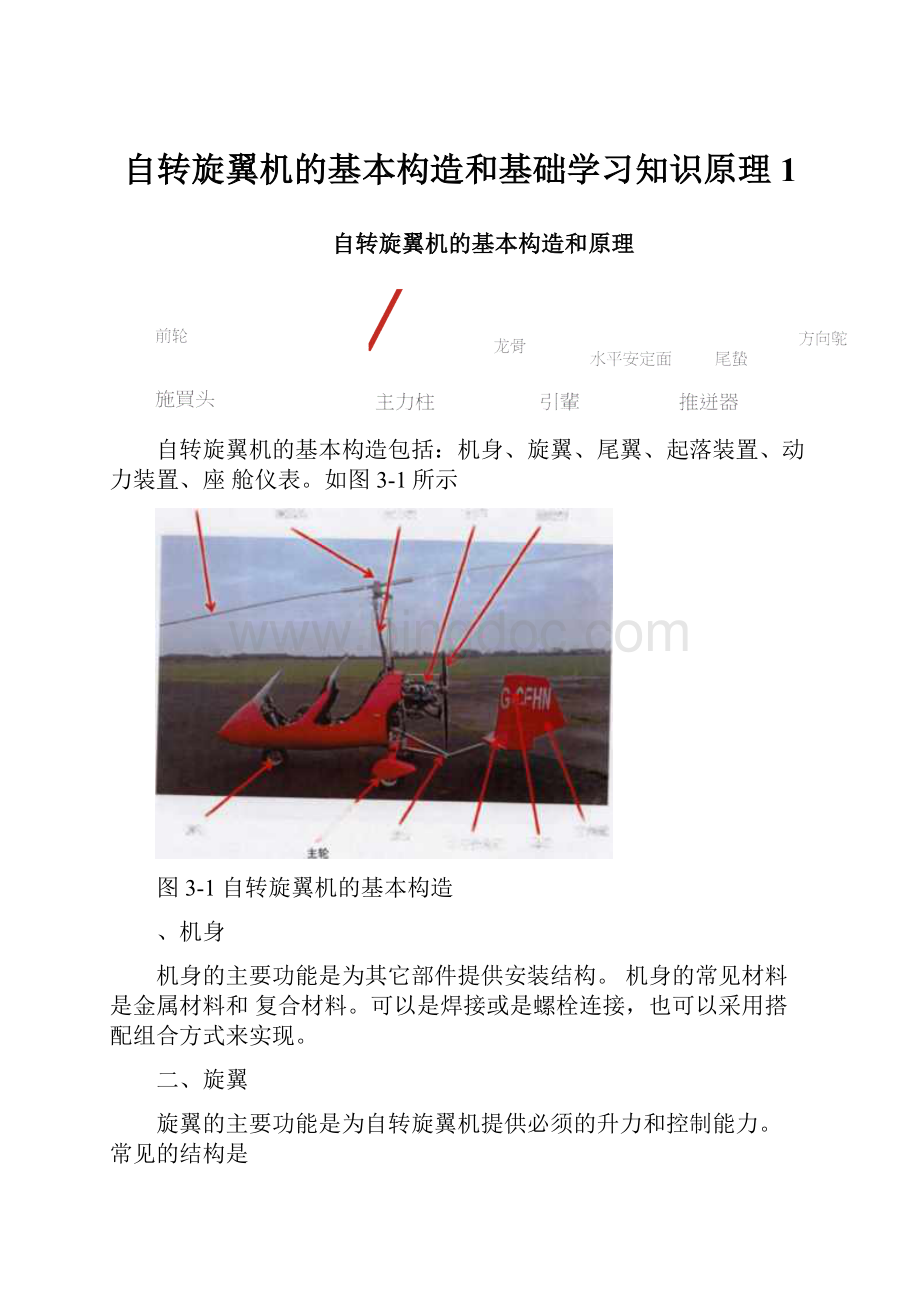
机身、旋翼、尾翼、起落装置、动力装置、座舱仪表。
如图3-1所示
图3-1自转旋翼机的基本构造
、机身
机身的主要功能是为其它部件提供安装结构。
机身的常见材料是金属材料和复合材料。
可以是焊接或是螺栓连接,也可以采用搭配组合方式来实现。
二、旋翼
旋翼的主要功能是为自转旋翼机提供必须的升力和控制能力。
常见的结构是
带桨毂倾斜控制的跷跷板式旋翼。
翘翘板式旋翼,也就是两片桨叶刚性地连接在
起,当一片桨叶向上运动时,另一片桨叶向下运动
淒动螺栓
图3-2跷跷板式结构的旋翼头
三、尾翼
尾翼由垂直尾翼和水平尾翼组成。
主要功能是为自转旋翼机提供稳定性及偏
转控制。
四、起落装置
起落装置的功用是提供航空器起飞、着陆和地面停放之用。
它可以吸收着陆
冲击能量,减少冲击载荷,改善滑行性能。
自转旋翼机一般有三个起落架,其中两个主要起落架位于重心附近的机身两
侧,起主要的支撑作用,另一个起落架在机头或机尾。
若在机尾,则称为后三点
式,较适合在粗糙道面上行进;若在机头,则称为前三点式,为大多数自转旋翼机所采用,并且该前轮可通过方向舵脚蹬控制偏转,以便地面滑行时灵活转弯。
轮式起落架一般设有减震装置,能吸收大部分着陆能量,可以在硬性路面上进行滑行起飞和降落。
能在水上起降的自转旋翼机,采用浮桶式起落架。
五、动力装置
为自转旋翼机提供动力,推动其前进的装置称为动力装置。
它由发动机、燃
料系统以及导管、附件仪表等组成。
在地面,动力装置提供旋翼系统预旋的动力;飞行时,动力装置不为旋翼系统提供动力。
六、座舱仪表
座舱仪表是提供给飞行员观察和判断飞行状态,以做出正确的操纵控制。
它
们一般包括发动机仪表(如转速表、油压表等)、气动仪表(如空速表、升降速度表等)、电子仪表(如地平仪、导航仪)等。
不同的自转旋翼机根据结构复杂程度选装不同配置的仪表。
图3-6为常见的自转旋翼机座舱仪表
谓注毎蠻飞机实且恢羸3的17看聲■矗有序不同"这毎决于税疋•胸可科骼査
图3-6常见的自转旋翼机座舱仪表
自转旋翼机的工作原理
自转旋翼机是通过旋翼来产生升力的,因此,了解旋翼空气动力的产生和变
化,是掌握自转旋翼机运动规律和操纵原理的基础。
本章介绍旋翼、桨叶的工作参数,分析旋翼升力、阻力的产生和影响因素,以及桨叶运动的空气动力
第一节旋翼和桨叶
、旋翼
(一)旋翼直径和桨盘载荷
旋翼直径:
旋翼旋转时,桨尖所划圆圈的直径,叫做旋翼直径,用D表示。
如图4-1所示。
图4-1旋翼直径
桨盘面积:
桨叶旋转所划圆的面积,叫桨盘面积,用F表示。
桨盘载荷:
自转旋翼机的飞行重量与桨盘面积的比值,叫做桨盘载荷。
即
P=G
式中:
P-桨盘载荷(千克/米2)
G-旋翼机的飞行重量(千克)
F-旋翼的桨盘面积(米2)
(二)旋翼实度(或称充填系数)
所有桨叶面积之和同桨盘面积的比值,叫做旋翼实度,用C表示。
KF叶
F
式中K-片数
F-一片桨叶的面积(米2)
(三)旋翼转速和桨毂旋转平面
旋翼转速:
旋翼每分钟旋转的圈数,叫旋翼转速,用n表示。
旋翼转动的
快慢又可用角速度(Q)表示。
角速度以每秒钟转过的弧度为单位(弧度/秒)。
两
者的关系为:
Q=2n(n/60)=m/30(弧度/秒)
圆周速度(Qr):
桨叶某一切面在旋转中的切向速度。
其数值等于旋翼的旋转角速度和该切面至旋转中心的距离的乘积,即Qr。
桨毂旋转平面:
桨毂旋转时与桨毂轴垂直的旋转平面,叫桨毂旋转平面。
在研究问题时,它是桨叶和旋翼很重要的基准面。
(四)旋翼的有效工作面积
旋翼工作时,整个桨盘面积并不都有效地产生拉力。
桨叶尖端由于存在桨尖涡流,桨盘上下压力差减小,产生的拉力很小。
桨毂不产生拉力,因此,在计算有效面积时应减去旋翼桨盘面积的中心和边缘部分。
有效面积约为桨盘面积的92%-96%
(五)旋翼迎角
旋翼迎角:
相对气流与桨毂旋转平面之间的夹角,叫旋翼迎角。
二、桨叶
(一)桨叶的平面形状
桨叶通常有矩形、梯形、混合梯形和桨尖具有后掠形,目前旋翼机普遍采用
矩形桨叶。
如图4-2所示。
—桨尖具丽掠形
图4-2桨叶的平面形状
(二)桨叶的切面形状
桨叶通常为平凸型、双凸型和对称型,如4.3图所示。
自转旋翼机通常采用
S翼型,如8H-12翼型。
平凸胆双卄科对称型
NACA
图4-3桨叶的切面型状
(三)桨叶的工作参数
1.桨叶切面安装角
桨叶的弦线与桨毂旋转平面之间的夹角,叫桨叶安装角,用©表示。
如图4-4所示。
相对于桨毂旋转平面,桨叶前缘高于后缘,©为正。
桨距:
桨叶半径等于0.7R处的切面(该切面称特性切面)的安装角。
总距:
各片桨叶的桨距的平均值叫旋翼的总距,用©7表示。
图4-4桨叶安装角
2.桨叶切面迎角
桨叶旋转时,桨叶切面的相对气流合速度(W)与其翼弦之间的夹角,用a表示。
相对气流从弦线下方吹来,迎角为正。
通常特性切面的迎角,叫桨叶迎角,用a7表示。
桨叶迎角和旋翼迎角是不同的。
3.桨叶切面来流角
桨叶的相对气流合速度W与桨毂旋转平面的夹角。
用&表示。
相对气流合速
度与桨毂旋转平面一般是不平行的。
W从上方吹向桨毂旋转平面,&为正;反之,
从下方吹向桨毂旋转平面,£为负。
如图4-5所示。
旋转轴
U二
图4-5桨叶安装角、迎角、来流角三者的关系
从图4-5中不难看出,安装角、桨叶迎角、来流角三者之间的关系为:
a=©-£
第二节旋翼的自旋
一、自旋
直升机和自转旋翼机之间的一个根本不同:
在于依靠动力维持飞行的过程中,
直升机通过发动机的动力旋转翼面,从上方吸收气流;自转旋翼机旋翼系统工作在自旋状态下。
这意味着旋翼依靠向上流过翼面的气流维持自身的自由旋转。
在
自旋过程中产生的力一方面维持旋翼的旋转,另一方面产生将飞行器维持在空中的升力。
从空气动力学的角度而言,在正常飞行时自转旋翼机旋翼系统的运转和
直升机的旋翼系统在发动机失效时,向前自旋下降时的运转方式一样。
如图4-6所示。
图4-6在自转旋翼机上气流通过旋翼系统的方向和动力飞行状态下的直升机相反
、垂直自旋
当旋翼机垂直下降时,桨叶也可以产生自旋,这称为垂直自旋。
由于旋翼机做垂直下降,这相当于有一个垂直气流吹向桨叶,另外,由于桨叶在自旋,这相当于有一个与桨叶转动盘面平行的气流吹向桨叶。
也就是说,有两股气流吹向桨叶(见图4-7,图中所示为桨叶的某一剖面)。
其中,吹向桨叶的垂直气流的速度通常是不变的,等于下降速度,而平行桨盘吹向桨叶某一剖面的气流速度实际上是该桨叶剖面转动的线速度,其大小正比于该桨叶剖面到转轴的半径,也就是
说,在桨盘外侧桨尖处,平行桨盘吹向桨叶的气流速度大,在桨盘内侧桨毂处,平行桨盘吹向桨叶的气流速度小(见图4-8)。
旋翼上某一桨叶剖面升力的定义跟固定桨叶上升力的定义是相同的,升力方向都是垂直于相对气流的方向。
注意,桨叶剖面的升力与旋翼升力的概念是不同的,旋翼上垂直于飞行方向的力称为旋翼升力,由图图4-8可见
图4-7某一桨叶剖面所处的相对气流与合成的相对气流
■ftfLli旋
图4-8桨尖和桨毂处的相对气流
三、桨盘分区
无论选用何种翼型,平行桨盘吹向桨叶的气流速度从桨毂到桨尖逐渐增大,
而向上气流速度不变,因此,从桨尖到桨毂迎角逐渐增大(在桨叶没有扭转的条
件下)。
这样,在桨毂附近,由于迎角大,可能超过失速迎角,桨毂附近就称为失速区(见图4-9)。
在桨尖附近,由于迎角小,升力几乎都在垂直方向,略向
前(即桨叶运动方向)倾斜,加上阻力后,合力就略向后倾斜,这意味着合力阻
碍桨叶转动,这里就称为被动区,由于此处的升力、阻力特性就像直升机螺旋桨一样,因此,也称为螺旋桨区,另外,由于桨尖附近相对气流速度高,升力大,平衡自转旋翼机重量的旋翼升力大部分都是在此区产生的。
在桨叶中段,迎角逐
渐增大,升力向前(即桨叶运动方向)倾斜的角度也增大,加上阻力后,合力向前倾斜,这意味着合力驱使桨叶转动,这里就称为驱动区,因为桨叶不需要发动机动力驱动而自行转动。
垂直自旋
TAF
TAF
亠I动力fll
』先于聲转轴
图4-9被动区/驱动区/失速区
图4-10桨叶不同部位产生的力
旋翼桨尖部位的受力主要是垂直向上的(参见图4-10),正是这部分垂直向上的力(即旋翼升力)使自转旋翼机飞在空中,而在旋翼的中间部位,旋翼主要受到推力而向前转动。
四、前飞行时旋翼的自旋
前面,我们讲述了自转旋翼机垂直下降时,旋翼的相对气流、迎角以及桨盘的分区。
自转旋翼机通常的飞行状态是前飞,此时旋翼的相对气流速度就要考虑前飞速度。
前行桨叶的相对气流速度是转动速度加上前飞速度,升力增大;后行桨叶的相对气流速度是转动速度减去前飞速度,升力减小。
前行和后行桨叶的相对气流速度不同,导致桨盘左右两侧的升力不对称,为了避免升力不对称,可以让前行桨叶向上挥舞以减小迎角和升力,同时另一侧的后行桨叶向下挥舞以增大
迎角和升力。
实现桨叶上下挥舞的机构如图4-11所示,旋翼围绕挥舞铰做跷跷板式的上下挥舞。
魏器梅凰統遠一点移动
—牛荣叶向上时.另一半桨叶向下
图4-11桨叶上下挥舞的机构
具体来说,前行桨叶产生的升力大于后行桨叶产生的升力,那么前行桨叶向上挥舞,同时,后行桨叶将向下挥舞。
由于桨叶的向上挥舞或向下挥舞,导致流向桨叶的相对气流的方向发生变化,即迎角发生变化。
桨叶的向上挥舞导致迎角减小,桨叶的向下挥舞导致迎角增大。
桨叶前行时迎角减小,这就增大了被动区,桨叶后行时迎角增大,这就增大了失速区,这样使桨盘的分区向后行桨叶一侧偏移(参见图4-12)。
图4-12后行桨叶失速
后行桨叶失速
前飞时自转旋翼机后行桨叶失速发生在从桨毂向外20%到40%左右区域
(见图4-12),而直升机后行桨叶失速发生在桨尖。
由于自转旋翼机后行桨叶失速是固有的,失速区在后行桨叶内侧,随着前飞速度增大,后行桨叶的迎角需要增大以避免左右两侧力不对称,这样,失速区会向后行桨叶的外侧移动,因为失
速区是由内侧向外侧发展,并不像直升机失速一开始就出现在桨尖(在桨叶没有扭转的条件下,直升机从桨毂到桨尖迎角逐渐增大,刚好与自转旋翼机相反),
所以,相对自转旋翼机的重心,力矩变化较小,驾驶员可能感到抖动有一点增加,但不会感觉会有较大俯仰或滚转的趋势
第三节旋翼的平衡
、旋翼的锥体和拉力的方向
旋翼拉力的方向与旋翼转动时所处的位置有关。
旋翼不旋转时,桨叶受本身重力的作用而下垂。
旋翼旋转时,每片桨叶上的作用力除重力外,还有空气动力和惯性离心力。
图4-13旋翼上挥形成锥体
如图4-13所示,当旋翼高速旋转时,桨叶拉力(T叶)对桨毂形成使桨叶上挥的力矩。
重力(G叶)对桨毂形成的力矩使桨叶下垂。
惯性离心力(F惯)将桨叶向外拉。
三个外力迫使旋翼产生弹性变形形成向上挥舞的锥体,从而使旋翼处于平衡状态。
旋翼的桨叶不论转到哪个方位,都是向上倾斜的,所以拉力向内倾斜。
旋翼
产生的拉力始终与桨盘法线方向一致。
当旋翼受到气流扰动或由于机动飞行使两
片桨叶的气流速度不一致时,旋翼会自发地产生挥舞运动来平衡两桨叶的不均匀拉力。
、旋翼的挥舞运动
旋翼的挥舞运动,即旋翼叶片在绕旋翼转轴旋转的同时周期性地上下运动。
这是旋翼用来抵消由于速度差产生的升力不均匀的主要途径。
图4-14旋翼挥舞时迎角的变化
在桨盘的一边,叶片向前运动(与飞行方向一致),称前行桨叶;而另一边叶片向后运动(称后行桨叶)。
由于整个飞行器是向前飞行的,前后行桨叶存在速度差。
前行桨叶上某一点的来流速度等于旋转的线速度加上飞行速度;而后行
桨叶上相对称的一点上的来流速度等于旋转的线速度减去飞行速度。
速度差的存
在使得前行桨的升力大于后行桨产生的升力,这称为升力的不对称。
翘翘板式的旋翼依靠周期性的挥舞运动来自发地抵消升力的不对称。
由于广义不平衡力的存在,旋翼在惯性力的作用下产生周期性的挥舞运动,而挥舞运动使旋翼在旋转的各个位向上的实际迎角发生变化,从而产生附加的气动力来平衡
两边升力的不对称。
如图4.14所示,在0°至180°方位内,桨叶的相对气流速度大;在180°至360°方位内,相对气流速度较小。
由0°至90°方位,相对气流速度逐渐增大。
桨叶相对气流速度增大愈多,由于桨叶自动调整拉力向上挥舞的就愈快,在90°方位桨叶相对气流速度增大最多,上挥最快。
由90°至180°方位,相对气流速度的增量逐渐减小,上挥速度逐渐减慢,但桨叶仍继续上挥。
转至180°方位,相对气流速度的增量为零,桨叶上挥速度为零,但桨叶挥舞的位置最高。
桨叶挥舞最快和最高的方位相差90°。
由于跷跷板式旋翼的特点是一边向上运动,一边则向下运动,一边向上运动的速度与另一边向下运动的速度大小一样,方向相反,因此,当一片桨叶在0°至90°方位上向上作加速挥舞运动时,另一片桨叶在180°至270°方位上向下作加速挥舞运动;同理,当一片桨叶在90°至180°作减速挥舞运动时,另一片桨叶在270°至360°方位上作减速挥舞运动。
旋翼挥舞运动的特点是在于飞行方向成0°和180°的地方,旋翼挥舞有最大幅值,而在90°和270°的地方挥舞运动速度最大。
由于有了挥舞运动,前行桨叶的实际迎角比无挥舞运动时的迎角要小,升力也相对要小一些;而后行桨的实际迎角比无挥舞时的迎角要大,升力也相对大一些。
于是,这种附加的升力匹配调整了前后行桨叶的升力的不对称,从而使旋翼保持稳定
 升级会员
升级会员 