加热炉出口温度与炉膛温度串级控制系统设计.docx
《加热炉出口温度与炉膛温度串级控制系统设计.docx》由会员分享,可在线阅读,更多相关《加热炉出口温度与炉膛温度串级控制系统设计.docx(14页珍藏版)》请在冰点文库上搜索。
加热炉出口温度与炉膛温度串级控制系统设计
第一章系统分析与控制方案的确立
1.系统分析
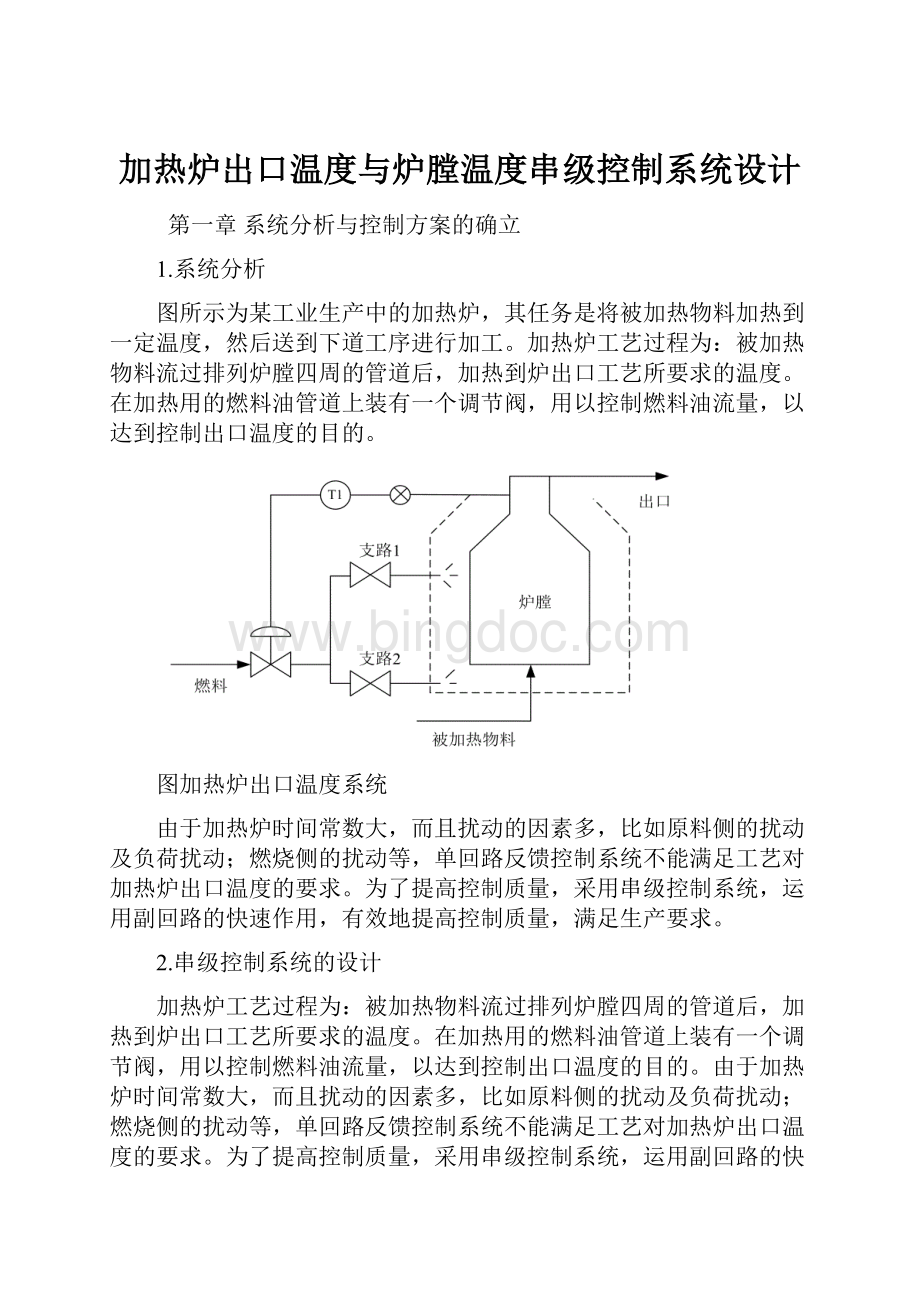
图所示为某工业生产中的加热炉,其任务是将被加热物料加热到一定温度,然后送到下道工序进行加工。
加热炉工艺过程为:
被加热物料流过排列炉膛四周的管道后,加热到炉出口工艺所要求的温度。
在加热用的燃料油管道上装有一个调节阀,用以控制燃料油流量,以达到控制出口温度的目的。
图加热炉出口温度系统
由于加热炉时间常数大,而且扰动的因素多,比如原料侧的扰动及负荷扰动;燃烧侧的扰动等,单回路反馈控制系统不能满足工艺对加热炉出口温度的要求。
为了提高控制质量,采用串级控制系统,运用副回路的快速作用,有效地提高控制质量,满足生产要求。
2.串级控制系统的设计
加热炉工艺过程为:
被加热物料流过排列炉膛四周的管道后,加热到炉出口工艺所要求的温度。
在加热用的燃料油管道上装有一个调节阀,用以控制燃料油流量,以达到控制出口温度的目的。
由于加热炉时间常数大,而且扰动的因素多,比如原料侧的扰动及负荷扰动;燃烧侧的扰动等,单回路反馈控制系统不能满足工艺对加热炉出口温度的要求。
为了提高控制质量,采用串级控制系统,运用副回路的快速作用,以加热炉出口温度为主变量,选择滞后较小的炉膛温度为副变量,构成炉出口温度与炉膛温度的串级控制系统有效地提高控制质量,以满足工业生产的要求,系统的串级控制结构图如图所示。
图加热炉出口温度串级控制系统结构图
串级控制系统的工作过程,就是指在扰动作用下,引起主、副变量偏离设定值,由主、副调节器通过控制作用克服扰动,使系统恢复到新的稳定状态的过渡过程。
由加热炉出口温度串级控制系统结构图可绘制出其结构方框图,如图所示。
图加热炉出口温度串级控制系统结构方框图
(1)主被控参数的选择
应选择被控过程中能直接反映生产过程中的产品产量和质量,又易于测量的参数。
在加热炉出口温度与炉膛温度的串级控制系统中加热炉出口温度为系统的主被控参数,因为加热炉出口温度是整个控制作用的关键,要求出口物料温度维持在某给定值上下。
如果其调节欠妥当,会造成整个系统控制设计的失败。
(2)副被控制参数的选择
从整个系统来看,加热炉的炉膛温度虽然不是我们要控制的直接目标,但是炉膛温度会很大程度上影响出口物料的温度,因此我们选择炉膛温度为副被控参数。
(3)控制器的选择
主控制器的选择:
主被控变量是工艺操作的主要指标(温度),允许波动的范围很小,一般要求无余差,主控制器应选PI控制规律。
副被控变量的设置是为了保证主被控变量的控制质量,提高系统的反应速度,提高控制质量,可以允许在一定范围内变化,允许有余差,但是副被控对象中含有延时环节,因此副控制器要选PI控制规律。
第二章控制系统仿真
通过MATLAB中的SIMULINK工具箱可以动态的模拟所的构造系统的响应曲线,以控制框图代替了程序的编写,只需要选择合适仿真设备,添加传递函数,设置仿真参数。
下面根据前文的分析的模型对串级控制系统进行仿真,以模拟实际中的阶跃响应曲线,考察串级系统的设计方案是否合理。
取主被控制对象的传递函数为
,副被控对象的传递函数为
,纯滞后时间τ=8s,反馈环节增益为1。
主调节器选择比例积分控制规律(PI),副调节器选择比例积分控制率(PI)。
1.阶跃响应性能
在时间为0时刻对不加入副回路的系统加入大小为1的阶跃信号,设置主控制器的PI参数为KP=,KI=,观察阶跃响应曲线。
系统的SIMULINK仿真框图和MATLAB仿真曲线图如图和图所示。
图不加副回路的SIMULINK仿真框图
图不加副回路MATLAB仿真曲线图
在时间为0时刻对加入副回路的系统加入大小为1的阶跃信号,在主控制器的PI参数为KP=,KI=的基础上,设置副控制器的PI参数为KP=,KI=,观察阶跃响应曲线。
系统的SIMULINK仿真框图和MATLAB仿真曲线图如图和图所示。
图加入副回路的SIMULINK仿真框图
图加入副回路的MATLAB仿真曲线图
由和两图对比可见,引入副回路的串级控制系统的动态特性比不加入副回路的控制系统有了很大的改善,提高了系统的工作频率,对被控对象的调节能力变得更强。
2.抗干扰性能
对不加入副回路的系统,250S时,在副被控制对象上加上单位阶跃的干扰信号。
系统的SIMULINK仿真框图和MATLAB仿真曲线图如图和图所示。
图不加副回路,250S时在副被控对象上加入单位阶跃干扰信号的SIMULINK仿真框图
图不加副回路,250S时在副被控对象上加入单位阶跃干扰信号的MATLAB仿真曲线图
对不加入副回路的系统,250S时,在主被控制对象上加上单位阶跃的干扰信号。
系统的SIMULINK仿真框图和MATLAB仿真曲线图如图和图所示。
图不加副回路,250S时在主被控对象上加入单位阶跃干扰信号的SIMULINK仿真框图
图不加副回路,250S时在主被控对象上加入单位阶跃干扰信号的MATLAB仿真曲线图
对加入副回路的系统,250S时,在副被控制对象上加上单位阶跃的干扰信号。
系统的SIMULINK仿真框图和MATLAB仿真曲线图如图和图所示。
图加入副回路,250S时在副被控对象上加入单位阶跃干扰信号的SIMULINK仿真框图
图加入副回路,250S时在副被控对象上加入单位阶跃干扰信号的MATLAB仿真曲线图
对加入副回路的系统,250S时,在主被控制对象上加上单位阶跃的干扰信号。
系统的SIMULINK仿真框图和MATLAB仿真曲线图如图和图所示。
图加入副回路,250S时在主被控对象上加入单位阶跃干扰信号的SIMULINK仿真框图
图加入副回路,250S时在主被控对象上加入单位阶跃干扰信号的MATLAB仿真曲线图
通过比较图和图可知,加入副回路的串级控制系统能够对加入到副被控对象的单位阶跃的干扰信号有很强的拟制能力,而不加副回路的系统对加入到副被控对象的单位阶跃信号的干扰却很难进行拟制,所以加入副回路的串级控制系统比不加副回路的系统拟制二次干扰的能力要强的多。
通过比较图和图可知,加入副回路的串级控制系统能够对加入到主被控对象上的单位阶跃的干扰信号具有有相当好的拟制能力,而不加副回路的系统对加入到主被控对象上的单位阶跃干扰信号不能进行有效的拟制,所以加入副回路的串级控制系统比不加副回路的系统拟制一次干扰的能力也要强很多。
第三章系统的不足与改进
1.系统的不足
通过以上的仿真可知,加热炉出口温度与炉膛温度串级控制系统的控制效果确实比不加副回路的单回路反馈系统的要好,而且抗干扰性能也比单回路系统要好的多。
但是,从上面的仿真结果中我们可以看到,即使加入了串级控制,系统的控制效果还不是那么理想,系统响应的超调量比较大,响应的时间比较长,因此应该考虑对系统进行改进。
2.系统的改进
从以上的仿真中我们可知,根据原被控对象的特点,我们假设的副被控对象模型中含有一个较大的滞后环节,因此,可考虑在副回路中加入Smith预估补偿控制。
Smith预估控制是针对大时延过程的预估补偿,其原理是按照过程的特性预估出一种模型加入到反馈控制系统中,使被延时了τ时间的被控量超前反映到调节器的输入端,使调节器提前动作,从而明显地减小超调量和加速调节过程。
Smith预估控制是得到广泛应用的对纯滞后对象的补偿控制方法,其原理如下。
对于图所示的具有纯滞后环节的对象G(s),有
式中
为对象中除去滞后环节的部分,τ为滞后时间。
引入纯滞后预估补偿器
,即Smith预估器,与对象G(s)相并联,补偿后对象的等效传递函数模型中不包含纯滞后项
,其中
针对不带滞后的对象
,应用连续系统的设计方法,设计控制器D(s)。
实际上,Smith预估器并不并联在被控对象上,而是并联在控制器D(s)上,等效为带Smith预估器的控制器
。
如图所示。
图中,控制器
为:
对控制器
进行离散化处理,得到离散化控制器传递函数模型
。
如果将对象用零阶保持器法进行离散化处理,则可以用上章介绍的离散化设计方法进行控制器的设计,其控制系统结构如图所示。
图Smith补偿结构图
图Smith预估控制器结构图
图离散化设计的Smith预估控制器结构图
图中,
,控制器
为针对不带滞后的环节
设计的离散控制模型。
表达式为:
系统的副回路采样周期为1s,则d=8,
则G’(s)=。
系统的SIMULINK仿真框图和MATLAB仿真曲线图如图和图所示。
图加入smith预估控制器的SIMULINK仿真框图
图加入smith预估控制器MATLAB仿真曲线图
通过比较图和图可知在副回路中加入smith预估控制器后系统的超调量和调整时间都得到了很大程度的改善,所以该改进措施是有效的。
参考文献
[1]关守平.计算机控制理论与设计[M].沈阳:
东北大学出版社,2011,85-89,95-96
[2]陈莉,张峰.串级-Smith预估控制在温度大滞后系统中的应用.仪表控制,2007,2(37-39)
[3]张国范,顾树生,王明顺等.计算机控制系统.北京:
冶金工业出版社,2004
[4]郭姝梅,张颖超.串级与Smith预估补偿相结合的控制系统仿真研究.武汉理工大学学报,2002,26(5):
72-74
[5]王春民,刘兴明,嵇艳鞠.连续与离散控制系统.北京:
科学出版社,2008
[6]王建辉,顾树生.自动控制原理.北京:
清华大学出版社,
 升级会员
升级会员 