磁盘驱动读取系统 (1).doc
《磁盘驱动读取系统 (1).doc》由会员分享,可在线阅读,更多相关《磁盘驱动读取系统 (1).doc(24页珍藏版)》请在冰点文库上搜索。
磁盘驱动读取系统
这个设计实例将在本教材的各章中循序渐进的加以讨论。
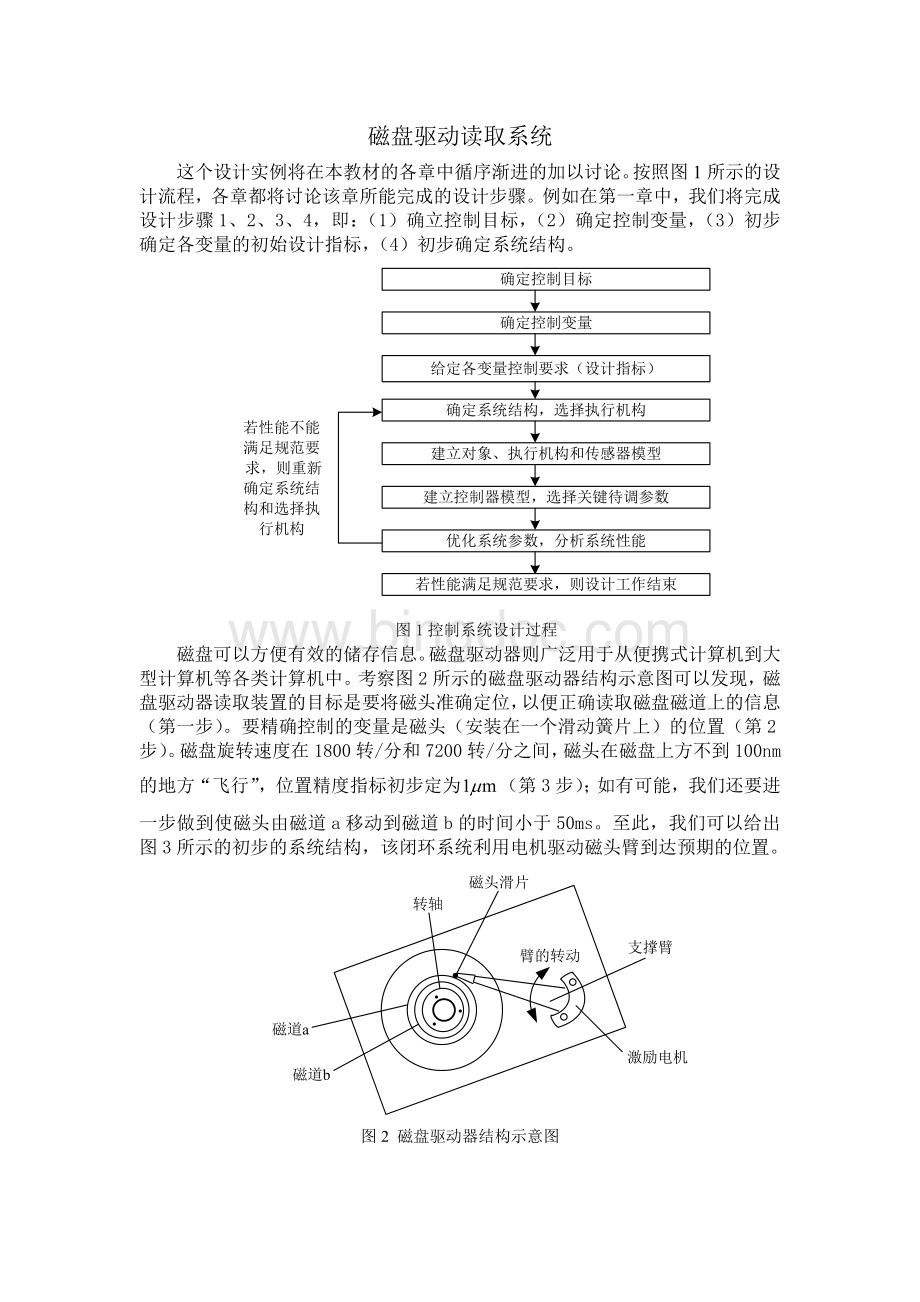
按照图1所示的设计流程,各章都将讨论该章所能完成的设计步骤。
例如在第一章中,我们将完成设计步骤1、2、3、4,即:
(1)确立控制目标,
(2)确定控制变量,(3)初步确定各变量的初始设计指标,(4)初步确定系统结构。
图1控制系统设计过程
磁盘可以方便有效的储存信息。
磁盘驱动器则广泛用于从便携式计算机到大型计算机等各类计算机中。
考察图2所示的磁盘驱动器结构示意图可以发现,磁盘驱动器读取装置的目标是要将磁头准确定位,以便正确读取磁盘磁道上的信息(第一步)。
要精确控制的变量是磁头(安装在一个滑动簧片上)的位置(第2步)。
磁盘旋转速度在1800转/分和7200转/分之间,磁头在磁盘上方不到100nm的地方“飞行”,位置精度指标初步定为(第3步);如有可能,我们还要进一步做到使磁头由磁道a移动到磁道b的时间小于50ms。
至此,我们可以给出图3所示的初步的系统结构,该闭环系统利用电机驱动磁头臂到达预期的位置。
图2磁盘驱动器结构示意图
图3磁盘驱动器磁头的闭环控制系统
在上述内容中,我们指出了磁盘驱动系统的基本设计目标:
尽可能将磁头准确定位在指定的磁道上,并且使磁头从1个磁道转移到另一个磁道所花的时间不超过10ms。
现在,我们将完成设计流程(图1)的第4、5步。
首先应选定执行机构、传感器和控制器(第4步),然后建立控制对象和传感器等元部件的模型。
磁盘驱动读取系统采用永磁直流电机驱动读取手臂的转动(见图2)。
磁头安装在一个与手臂相连的簧片上,它读取磁盘上各点处不同的磁通量并将信号提供给放大器,簧片(弹性金属制成)保证磁头以小于100nm的间隙悬浮于磁盘之上(见图4)。
图5a中的偏差信号是在磁头读取磁盘上预先录制的索引磁道时产生的。
如图5b所示,我们假定磁头足够精确,传感器环节的传递函数为;作为足够精确的近似,我们用图6给出的电枢控制直流电机模型()来对永磁直流电机建模;此外,图中也给出了线性放大器的模型;而且我们还假定簧片是完全刚性的,不会出现明显的弯曲。
图4磁头安装结构图
图6电枢控制直流电机框图
图5磁盘驱动读取系统系统框图模型
表1磁盘驱动读取系统典型参数
参数
符号
典型值
手臂与磁头的转动惯量
1N·m·s2/rad
摩擦系数
放大器系数
电枢电阻
电机系数
5N·m/A
电枢电感
1mH
表1给出了磁盘驱动读取系统的典型参数,于是我们有:
还可以改写为:
其中,。
由于,因此常被略去不计,因此有:
,或
该闭环系统的框图模型见图7。
利用框图变换化简规则,我们有
利用的2阶近似表示,可以有,当时,最后可得:
图7闭环系统的框图模型
使用MATLAB的函数step,可以得到时如图8所示的系统阶跃响应。
图8时,图7所示系统的时间响应
设计磁盘驱动器系统可以联系如何进行折中和优化。
磁盘驱动器必须保证磁头的精确位置,并减小参数变化和外部振动对磁头定位造成的影响。
机械臂和支撑簧片将在外部振动(如对笔记本电脑的振动)的频率点上产生共振。
对驱动器产生的干扰包括物理振动、磁盘转轴轴承的磨损和摆动,以及元器件老化引起的参数变化等。
本节将讨论磁盘驱动器对干扰和参数变化的响应特性,讨论调整放大器增益时,系统对阶跃指令的瞬态响应和稳态误差。
本节内容对应于图1所示设计流程的第6步和第7步。
考虑图9所示的系统,该闭环系统将可调增益放大器用作控制器。
根据表1给定的参数,可得到图10所示的传递函数。
图9磁盘驱动器磁头控制系统
图10具有表1所示典型参数的磁盘驱动器磁头控制系统
首先我们确定当输入为单位阶跃信号,干扰为时,系统内部的稳态误差。
当时,我们有:
,于是。
即系统对单位阶跃输入的稳态跟踪误差为零,这个结论不会随着系统参数的改变而改变。
MATLAB文本1:
Ka=10;%选择Ka
nf=[5000];df=[11000];ng=[1];dg=[1200];
[num,den]=series(Ka*nf,df,ng,dg);
[n,d]=cloop(num,den);
t=[0:
0.01:
2];
y=step(n,d,t);
plot(t,y),grid;
ylabel('y(t)'),xlabel('Time(sec)')
(a)Ka=10时的阶跃响应曲线
(b)Ka=80时的阶跃响应曲线
图11闭环系统
现在我们来研究调整时系统的瞬态响应特性。
时的闭环传递函数为:
应用MATLAB文本1,可得到和时系统的响应如图11(a)和图11(b)所示。
可以看出,当时系统对输入指令的响应速度明显加快,但响应却出现了振荡。
接下来研究干扰对系统的影响[令]。
我们希望将干扰的影响减小到很低的水平,当时系统对的响应为:
应用MATLAB文本2,当,时,可以得到如图12所示的系统响应。
为进一步减小干扰的影响,需要增大至超过80.但此时系统对阶跃指令,的响应会出现不能接受的振荡。
后续内容我们将给出的最佳设计值,以使系统响应能够满足既快速又不振荡的要求。
MATLAB文本2:
Ka=80;%选择Ka
nf=[5000];df=[11000];ng=[1];dg=[1200];
[num,den]=feedback(ng,dg,Ka*nf,df);
num=-num;%干扰信号取负值
t=[0:
0.01:
2];
y=step(num,den,t);
plot(t,y),grid;
ylabel('y(t)'),xlabel('Time(sec)')
图12时系统对阶跃干扰的响应曲线
下面进一步讨论图11给出的系统。
图13重新给出了控制系统的设计流程,以下仍然按该设计流程展开讨论。
正如第3步所要求的,我们先确定预期的系统性能,然后调整放大器增益,以便获得尽可能好的性能。
图13控制系统的设计流程
我们的目标是使系统对阶跃输入有最快的响应,同时
(1)限制超调量和响应的固有振荡;
(2)减小干扰对磁头输出位置的影响。
这些指标要求在表2中给出。
表2瞬态响应的性能要求
性能指标
预期值
超调量
小于5%
调节时间
小于250ms
对单位阶跃干扰的最大响应值
小于5×10-3
考虑电机和机械臂的2阶模型,忽略线圈感应的影响,于是可得到如图14所示的闭环系统。
图14具有电机和负载的2阶模型的控制系统
当时,系统的输出为:
于是,。
我们可用MATLAB来计算系统的响应,如图15所示。
表3则给出了取不同值时系统性能指标的计算结果。
MATLAB文本3:
Ka=30;%选择Ka
t=[0:
0.01:
1];
nc=[Ka*5];dc=[1];
ng=[1];dg=[1200];
[n,d]=series(nc,dc,ng,dg);
[num,den]=cloop(n,d);
y=step(num,den,t);
plot(t,y),grid;
ylabel('y(t)'),xlabel('Time(sec)')
图15分别为30和60。
系统对单位阶跃输入的响应,,
表32阶系统的单位阶跃响应
20
30
40
50
60
超调量
0
1.2%
4.3%
10.8%
16.3%
调节时间
0.55
0.40
0.40
0.40
0.40
阻尼比
1
0.82
0.707
0.58
0.50
对单位阶跃干扰的响应最大值
-10×10-3
-6.6×10-3
-5.2×10-3
-3.7×10-3
-2.9×10-3
从表3可以看出,当增加到60时,干扰作用的影响已减小了一半。
此外,我们还能用图示方式显示在单位阶跃干扰输入作用下的输出,如图16所示。
显示,要想达到设计目的,就必须选择一个合适的增益。
这里折中选择了,注意,它并不能满足所有的性能指标。
MATLAB文本4:
Ka=30;%选择Ka
t=[0:
0.01:
1];
nc=[Ka*5];dc=[1];
ng=[1];dg=[1200];
[num,den]=feedback(ng,dg,nc,dc);
num=-num;%改变干扰信号的符号
y=step(num,den,t);
plot(t,y),grid;
ylabel('y(t)'),xlabel('Time(sec)')
图16分别为30和60。
系统对单位阶跃输入的响应,,
现在我们继续讨论可调时,磁盘驱动读取系统的稳定性,并重新考虑设计流程的第4步见图13。
考虑如图17所示的系统。
除去新添加的速度传感器,它和上面讨论的带电机和载荷的系统是同一个系统。
首先考虑开关开启时的情况,这时的闭环传递函数为:
图17带速度反馈的磁盘驱动器读头闭环系统
其中,。
于是特征方程为
或
建立Routh判定表为:
1
20000
1020
其中。
当时,,出现了临界稳定的情况。
借助辅助方程,即
。
可知系统在虚轴上的根为。
为了保证系统的稳定性,应该要求。
现将图17中的开关合上,相当于增加了速度反馈。
此时,系统的闭环传递函数为:
。
如图18所示,其中的反馈因子为。
图18当速度反馈开关合上时的等价系统
于是可得特征方程为:
即
故有
对应的Routh判定表为:
1
1020
其中。
为保证系统的稳定性,在的条件下,所取的参数应使得。
当,时,利用MATLAB求得的系统响应如图19所示,响应的调节时间(2%准则)近似为260ms,超调量为零。
表4总结了系统的性能指标,从中可以看出,以上设计近似满足性能指标要求。
如要严格达到调节时间不大于250ms指标要求,则需要重新考虑的取值。
表4磁盘驱动器系统的性能
性能指标
预期值
实际值
超调量
小于5%
0%
调节时间
小于250ms
260ms
单位扰动的最大响应
小于5×10-3
2×10-3
MATLAB文本:
Ka=100;K1=0.05%选择速度反馈增益K1和放大器增益Ka
ng1=[5000];dg1=[11000];
ng2=[1];dg2=[1200];
nc=[K11];dc=[01];
[n,d]=series(Ka*ng1,dg1,ng2,dg2);
[num,den]=feedback(n,d,nc,dc);
t=[0:
0.001:
0.5];
y=step(num,den,t);
plot(t,y),grid;
ylabel('y(t)'),xlabel('Time(sec)')
图19带有速度反馈的磁盘驱动器系统的响应
现在为磁盘驱动读取系统设计一个合适的PD控制器,使得系统能够满足对单位阶跃响应的设计要求。
给定的设计要求如表5所示,闭环系统的框图模型如图20所示。
从图中可以看出,我们为闭环系统配置了前置滤波器,其目的在于消除零点因式对闭环传递系数的不利影响。
为了得到具有最小节拍响应的系统,针对图20给出的2阶模型,我们将预期的闭环传递函数取为:
表5磁盘驱动器控制系统的设计要求与实际性能
性能指标
预期值
实际值
超调量
小于5%
0.1%
调节时间
小于150ms
40ms
单位扰动的最大响应
小于5×10-3
6.9×10-5
由表6可知,对应的标准化传递函数的系数应为:
标准化调节时间应为:
图20带有PD控制器的磁盘驱动器控制系统(2阶系统模型)
表6最小节拍系统的标准化传递函数的典型系数和响应性能指标
系统阶数
系数
超调量
欠调量
90%上升时间
100%上升时间
调节时间
2
1.82
0.10%
0.00%
3.47
6.59
4.82
3
1.90
2.20
1.65%
1.36%
3.48
4.32
4.04
4
2.20
3.50
2.80
0.89%
0.95%
4.16
5.29
4.81
5
1.70
4.90
5.40
3.40
1.29%
0.37%
4.84
5.73
5.43
6
3.15
6.50
8.70
7.55
4.05
1.63%
0.94%
5.49
6.31
6.04
而实际系统对调节时间的设计要求为,于是可取。
在这种情况下,调节时间的预期值为,满足了设计要求。
这样的分母则为:
。
由此可得到图20所示闭环系统的特征方程为:
比较和的系数,有,,可解得,。
至此,便得到了所需要的PD控制器为。
然后,将前置滤波器取为,就能进一步对消引入PD控制器新增的闭环零点。
本例的模型忽略了电机磁场的影响,但所得的设计任然是很准确的。
表5给出了系统的实际响应,从中可以看出,系统的所有指标都满足了设计要求。
现在为磁盘驱动读取系统设计合适的状态变量反馈控制器,以便使系统具有预期的响应特性。
给定的设计要求如表7中第一列所示,系统的2阶开环模型如图21所示。
我们将在该2阶开环模型的基础上,设计所需要的闭环系统,并同时采用2阶和3阶开环模型来计算系统响应,以便检验我们的设计结果。
图21磁头控制系统的开环模型
表7磁盘驱动控制系统的设计要求与实际性能
性能指标
预期值
2阶模型响应
3阶模型响应
超调量
<5%
<1%
0%
调节时间
<50ms
34.3ms
34.2ms
单位阶跃干扰的响应峰值
5.2×10-3
5.2×10-5
5.2×10-5
首先将状态变量取为和,如图22所示。
再假定磁头的位置和速度均可以测量,因此,可以如图22中所示的那样引入状态变量反馈信号。
另外,为了使变量及时准确的跟踪,我们取。
图22具有两条状态变量反馈回路的闭环系统
由图21可知,开环系统的2阶状态微分方程为:
再由图22可知,闭环系统的状态微分方程为
将带入后可得,闭环系统的特征方程为:
为了满足设计要求,应该取,。
在此情况下,预期的闭环特征方程为:
。
于是有或,又因为要求,于是又有。
至此,我们为磁盘驱动读取系统设计了一个合适的状态变量反馈控制器。
利用2阶开环模型,我们仿真机算了闭环系统的实际响应,所得结果如表7中的第3列所示。
这些结果表明,闭环系统满足了所有的设计要求。
如果考虑磁场电感的影响,并设电感mH,则磁盘驱动器读取系统的模型中应该增加以下环节:
由此可以得到更精确的3阶开环模型,利用含有电感的3阶开环模型,并沿用前面为2阶系统选取的反馈增益,我们同样仿真机算了闭环系统的实际响应,并将结果列于表7的第4列。
由此可见,3阶闭环系统同样满足了设计要求。
但比较2阶和3阶模型的响应可以看出,两者差别甚微,这说明2阶开环模型足以精确的描述磁盘驱动读取系统。
下面是三个励志小故事,不需要的朋友可以下载后编辑删除!
!
!
谢谢!
!
!
你可以哭泣,但不要忘了奔跑
2012年,我背着大包小包踏上了去往北京的火车,开启了北漂生涯。
彼时,天气阴沉,不知何时会掉下雨滴,就像我未知的前方一样,让人担忧。
去北京的决定是突然而果决的,我在宿舍纠结了一天,然后在太阳逃离窗口的时候打电话告诉父母,我要到首都闯一闯。
消息发出去之后,并没有预料之中的强烈反对,父亲只给我回了一个字:
好。
就这样看似毫无忧虑的我,欣喜地踏上了北上的路。
有些事情只有真正迈出第一步的时候,才会迎来恐惧。
当我踏上北上的列车时,才惊觉对于北京,除了天安门、央视大楼这些着名建筑,我知之甚少。
俗话说无知者无畏,可于我而言,这句话并不适用,因为在坐上火车那一刻,我就开始对未来胆战心惊,毫无底气。
火车开动之后,我的心情变得更加复杂而紧张,甚至一度心生退意。
人类果然是一个无解的方程式,看似无畏的勇气背后不知藏下了多少怯懦和犹豫。
旁座的姐姐见我一人,开始和我有一搭没一搭地聊起了天。
几分钟后,我们竟如同许久未见的好友一般,开始聊起了各自的生活。
我说出了自己的恐惧与未见,期冀从她那里得到些许安慰和鼓励。
出乎意料地,她并没有说一些心灵鸡汤般的哲理语句,反而给我讲了一个故事,一个让我在很长一段时间都印象深刻,每次想起便会荷尔蒙再度升高的故事,一个她自己的故事。
那是一段并不愉快的经历,整段经历是蜿蜒前行的。
高考中,她因为做错了三道大题,成为家里的罪人。
朋友极尽嘲笑,亲戚们也开始暴露自己毒舌的属性,父母当时并没有过多指责,因为他们正在跟自己的兄弟姐妹们为了祖母的遗产争得死去活来。
那被人类歌颂的血缘、亲情,在所有的利益面前瞬间分崩离析。
那时的她,像极了一个被遗弃的孩子。
或是为了远离当时一片狼藉的场面,家境拮据的她,怀着可能被众叛亲离的勇气,报考了一个三本院校。
当她怀揣着自己暑假赚的6000块钱踏进学校的时候,她以为一切喧闹终将与自己隔绝。
但是事实上,天真的想法只维系了几天,便不攻自破。
专业老师并不看好这个寡言少语的孩子,因为在她看来,法律专业除了要掌握专业知识之外,利索的嘴皮子也是一名律师出人头地不可缺少的法宝,而这个孩子,显然并没有这方面的天赋。
糟糕的情况在不断地蔓延,那段时期,她如同造物者手中的失败品,什么都做不好,注意力像手中的沙子一般怎么握都握不住。
课文理解不了,丧失阅读能力,法律条款、单词统统在跟她作对,连最简单的问题都会堵住她的嘴。
考试更不用提了,考前总是睡不好觉,刚迈进考场全身就开始发抖,像个从来没有上过战场的士兵一样。
她一直溺在泪水中,从未上岸,深度抑郁,一度心生退学的想法。
她深夜给母亲打去电话,想要获取安慰,家人说当初你自己做的决定,于是她只好自己硬撑着。
为了防止自己再胡思乱想,她报了八门选修课,把自己的时间填得满满的。
为了应付每科超过6000字的论文,她总是第一个跑到食堂去打饭,背日语,背法语,做英语听力,背法律常识虽不至于像匡衡一样凿壁偷光,但是只要有光的地方,她都待过。
一个追着阳光跑的人,是永远不会输在路上的。
在不停歇的灌输之下,大脑勉强接受了来自外界的压迫。
虽不能到达天才的地步,但是起码恢复了正常的记忆功能。
四年的大学生涯也在马不停蹄中准备落下帷幕,为了能够拿到好的工作机会,她到处参加比赛,只是为了让自己在与聘用单位较量时能够多一点筹码。
与此同时,她还要忙毕业论文。
在有限的时间内打一场不能失败的战争,是那时她的唯一目标。
上天果然不会亏待努力的人,她的毕业论文很惊艳,老师甚至生出了让她留校任教的打算,不过还是被她拒绝了,因为她已经进入了当地最着名的一家律师事务所。
在刚进入事务所的时候,她过去光鲜的外衣再次黯然失色。
为了能够追赶同事的步伐,她过上了每天哒哒哒飞速敲打键盘的生活。
为了跟进一个案子,她常常整夜都在做准备,等到一切就绪时,晨光也恰好如期而至。
如今,她已经成为北京最着名的律师事务所的招牌律师之一。
这次她本可坐飞机回京,只是因为贪恋沿途的风景才会与我相遇。
在最难熬的时光要学会一路狂奔,不要多想,也不要把希望寄托在别人身上,人生来便是要努力的,你可以哭泣,但是不要忘了奔跑。
她拍着我的肩膀,身上散发着莲花的香味,清新而让人愉悦。
终点站很快到达,天空依然阴沉着,不知下一秒云上染墨,雨滴降落,还是阳光冲破云雾,普照大地。
当我与她告别,重新背着沉重的行李,阔步向前,我知道等待我的不一定是美好的未来,但是只有拼一拼,才足够对得起自己。
每个人都有一个蜕变的过程,这个过程只能自己咬着牙度过,熬过了便化茧成蝶,熬不过,便像蒲公英一样,被生活的风吹着走。
一辈子走好一条路
有两个西班牙人,一个叫布兰科,一个叫奥特加。
虽然他们同龄,又是邻居,但家境却相差很远。
布兰科的父亲是一个富商,住别墅,开豪车。
而奥特加的父亲却是一个摆地摊的,住棚屋,靠步行。
从小,布兰科的父亲就这样对儿子说:
“孩子,长大后你想干什么都行,如果你想当律师,我就让我的私人律师教你当一名好律师,他可是出名的大律师;你如果想当医生,我就让我的私人医生教你医术,他可是我们这里医术最高的医生;如果你想当演员,我就将你送去最好的艺术学校学习,找最好的编剧和导演来给你量身定做角色,永远让你当主角;如果你想当商人,那么我就教你怎样做生意,要知道,你老爸可不是一个小商人,而是一个大商人,只要你肯学,我会将我的经商经验全都传授给你!
”
奥特加的父亲则总是这样对儿子说:
“孩子,由于爸爸的能力有限,家境不好,给不了你太多的帮助,所以我除了能教你怎样摆地摊外,再也教不了你任何东西了。
你除了跟我去学摆地摊,其他的就是想也是白想啊!
”
两个孩子都牢牢地记住了自己父亲的话。
布兰科首先报考了律师,还没学几天,他就觉得律师的工作太单调,根本就不适合他的性格。
他想,反正还有其他事情可以干,于是,他又转去学习医术。
因为每天都要跟那些病人打交道,最需要的就是耐心,还没干多久,他又觉得医生这个职业似乎也不太适合他。
于是,他想,当演员肯定最好玩,可是不久后,他才知道,当演员真的是太辛苦了。
最后,他只得跟父亲学习经商,可是,这时,他父亲的公司因为遭遇金融危机而破产了。
最终,布兰科一事无成。
奥特加跟父亲摆了几天地摊后,就哭着不肯去了,因为摆地摊日晒雨淋不说,还常遭人白眼。
可是,一想到除了摆地摊,再也没别的事可干,他又硬着头皮跟父亲出发了。
可是,还没干几天,他又受不了了,又吵着闹着不肯去了。
因为没事可干,不久,他又跟着父亲出发了。
慢慢地,他竟然从摆地摊中发现,要想永远摆脱摆地摊的工作,就得认真地将地摊摆好。
结果,几年后,他终于拥有了自己的专卖店。
30年后,他拥有了属于自己的服装集团。
如今天,该集团在世界68个国家中总计拥有3691家品牌店,一跃成为世界第二大成衣零售商。
奥特加(AmancioOrtega)以250亿美元个人资产,位列《福布斯》2010年世界富豪榜第9位。
人并不是选择越多越好,因为多了反而拿不定主意,无法坚持到底。
反而是那些没有选择的人,最终获得了成功。
把理想推远一点
比尔·拉福是美国当代的著名企业家。
比尔从商的志向来自他的父亲,他的父亲在商界滚打多年却始终没有取得什么骄人的成绩。
受父亲影响,比尔从小就立志要做一位成功的商人,更何况他的父亲也认为他做事机敏果断,敢于创新,非常具有商业天赋,所以一直鼓励比尔去读经济或者商贸类大学。
让父亲没有想到的是,比尔在高中毕业后,却来到麻省理工学院学习工科中最基础最普通的机械制造专业。
比尔的父亲生气地指责比尔说:
“你一定是忘记了自己的理想,要知道,你并不是要做一位出色的工人,而是做一位成功的商人,你为什么不读商业贸易,反而要来学机械制造呢?
你这不是拉近理想,分明是把理想推得更远了!
”
比尔不赞同父亲的观点,他觉得适当把理想推远一点是正确的,因为工业商品在商贸中占了绝对的大多数,如果不具备工科知识,就不能了解产品的性能、生产制造等各方面的情况,将来很难保证能在经商中占到优势,更何况工科学习不仅是增强工业技能,还能帮助一个人建立严谨求实的思维能力,培养一种脚踏实地的工作态度,这些素质都是经商所不能缺少的。
听了比尔的解释,他的父亲终于明白了比尔的想法,比尔也得以留在麻省理工学院继续读书,四年的大学,比尔没有拘泥于本专业,他同时还学习了许多化工、建筑、电子等方面的基本知识,毕业后,立志从商的比尔并没有立刻带着这些知识投身商海,而是考入了芝加哥大学继续攻读经济学的硕士学位,这
 升级会员
升级会员 