三角履带无线监控机器人.docx
《三角履带无线监控机器人.docx》由会员分享,可在线阅读,更多相关《三角履带无线监控机器人.docx(16页珍藏版)》请在冰点文库上搜索。
三角履带无线监控机器人
三角履带无线监控机器人
作者:
DFRobot 文章来源:
www.RoboticF 更新时间:
2008年09月20日 打印此文 浏览数:
25558
注:
此文由DFRobot授权RoboticFan发布,未经许可不得转载。
简介:
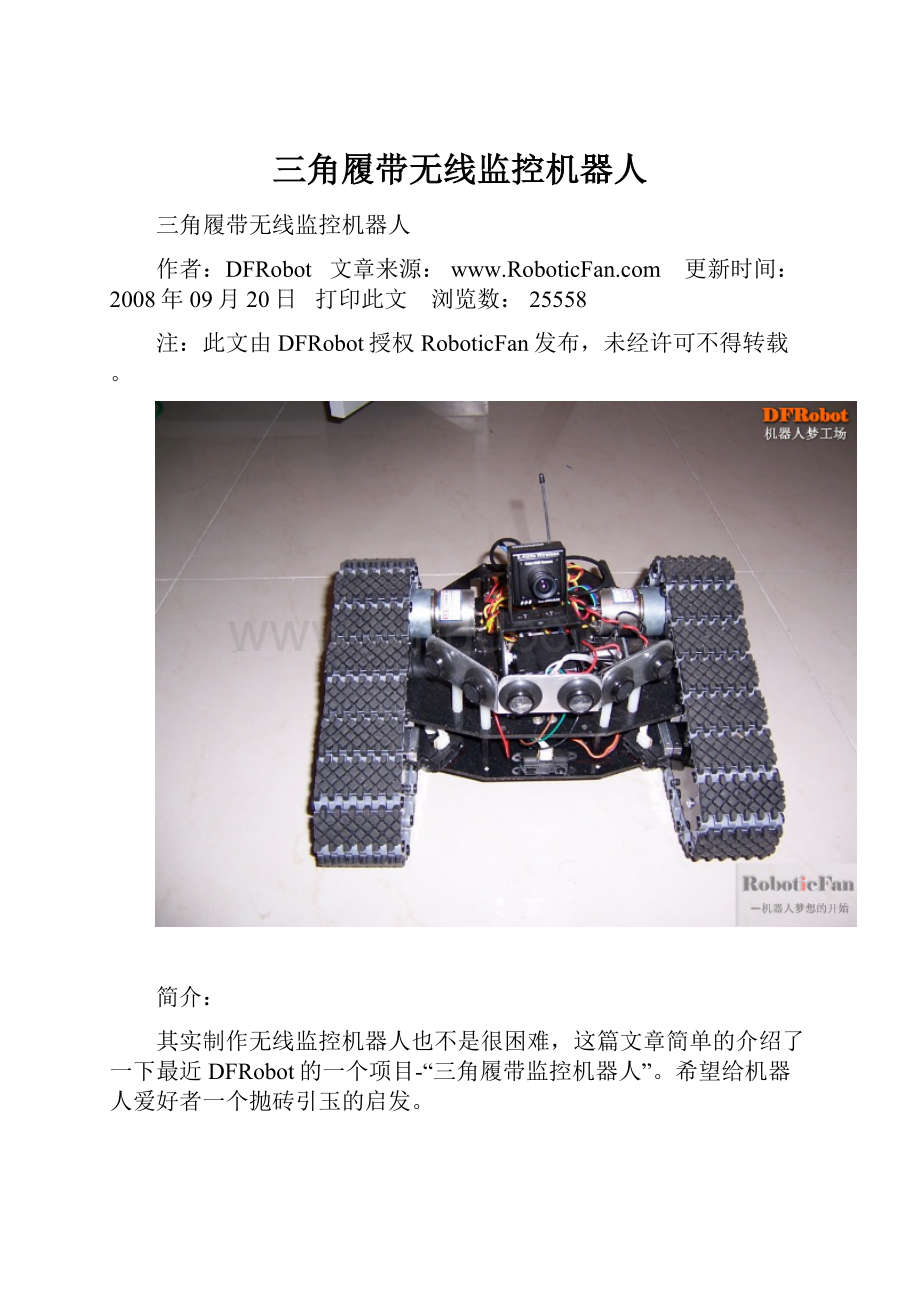
其实制作无线监控机器人也不是很困难,这篇文章简单的介绍了一下最近DFRobot的一个项目-“三角履带监控机器人”。
希望给机器人爱好者一个抛砖引玉的启发。
材料清单:
1)霹雳5号履带底盘
2)DFMoto1.2 直流电机驱动模块
3)Arduino主板
4)3个SharpGP2D12红外传感器
5)3个URMV3.2 超声波传感器
6)一个3D加速度传感器
7)APC220无线通信模块
8)2路云台,由2个舵机组成
实现的功能:
1)通过PC实现无线控制
2)实现无线监控
3)实现自动避障
4)演示加速度传感器和多超声波,红外传感器的物理连接
系统介绍:
整套系统以Arduino板为板载主控单元,主要提供了底层的蔽障处理,以及传感器数据的滤波和处理。
信号通过APC220无线模块发送到PC端。
Arduino板一共连接了3个红外距离传感器,3个URMV3.2超声波传感器,一个3D加速度传感器。
总共6路模拟输入,3路PWM输入。
以及2路摄像头云台的舵机控制,2路PWM输出。
另外用了一套无线摄像头模块,通过PC的视频采集来获取实时的视频图像。
下面看图说明咯。
作者:
DFRobot 文章来源:
www.RoboticF 更新时间:
2008年09月20日 打印此文 浏览数:
25559
图:
加上了DFMoto1.2驱动模块
很简单的连接,直接将2路直流电机连接到DFMoto驱动模块上。
图:
相应的电池模块
电池包放在中间的夹层里。
图:
Arduino模块
著名的Arduino模块,关于Arduino就不多介绍了, 有比较详细的介绍,有兴趣可以去了解一下。
Arduino刚好提供了所需的6路模拟输入。
3路红外和3路加速度计就全部连接在A板的模拟输入口。
作者:
DFRobot 文章来源:
www.RoboticF 更新时间:
2008年09月20日 打印此文 浏览数:
25560
图:
APC220无线通信模块
APC220无线通信模块提供了19200bps的通信速率以及高达1000m的通信距离(在可视情况下),实际的通信距离没有这么远,而且随着距离的增加,通信速率会下降。
但是APC220提供了纠错,因此无需担心无线传输中的误码。
这款APC220连接到Arduino的TX,RX端。
图:
3D加速度传感器
作者:
DFRobot 文章来源:
www.RoboticF 更新时间:
2008年09月20日 打印此文 浏览数:
25561
图:
摄像头云台
这是用于云台控制的舵机。
摄像头放在云台上,就可以控制摄像头的上下,左右。
图:
驱动模块特写
图:
电源开关
作者:
DFRobot 文章来源:
www.RoboticF 更新时间:
2008年09月20日 打印此文 浏览数:
25562
图:
无线摄像头以及云台
作者:
DFRobot 文章来源:
www.RoboticF 更新时间:
2008年09月20日 打印此文 浏览数:
25563
图:
3路超声波传感器
图:
3路红外GP2D12距离传感器
图:
3路红外GP2D12距离传感器
作者:
DFRobot 文章来源:
www.RoboticF 更新时间:
2008年09月20日 打印此文 浏览数:
25564
图:
无线摄像头模块
 升级会员
升级会员 