Matlab与adams联合仿真+仿真结果动画的保存与后处理教学文稿Word文档下载推荐.docx
《Matlab与adams联合仿真+仿真结果动画的保存与后处理教学文稿Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《Matlab与adams联合仿真+仿真结果动画的保存与后处理教学文稿Word文档下载推荐.docx(16页珍藏版)》请在冰点文库上搜索。
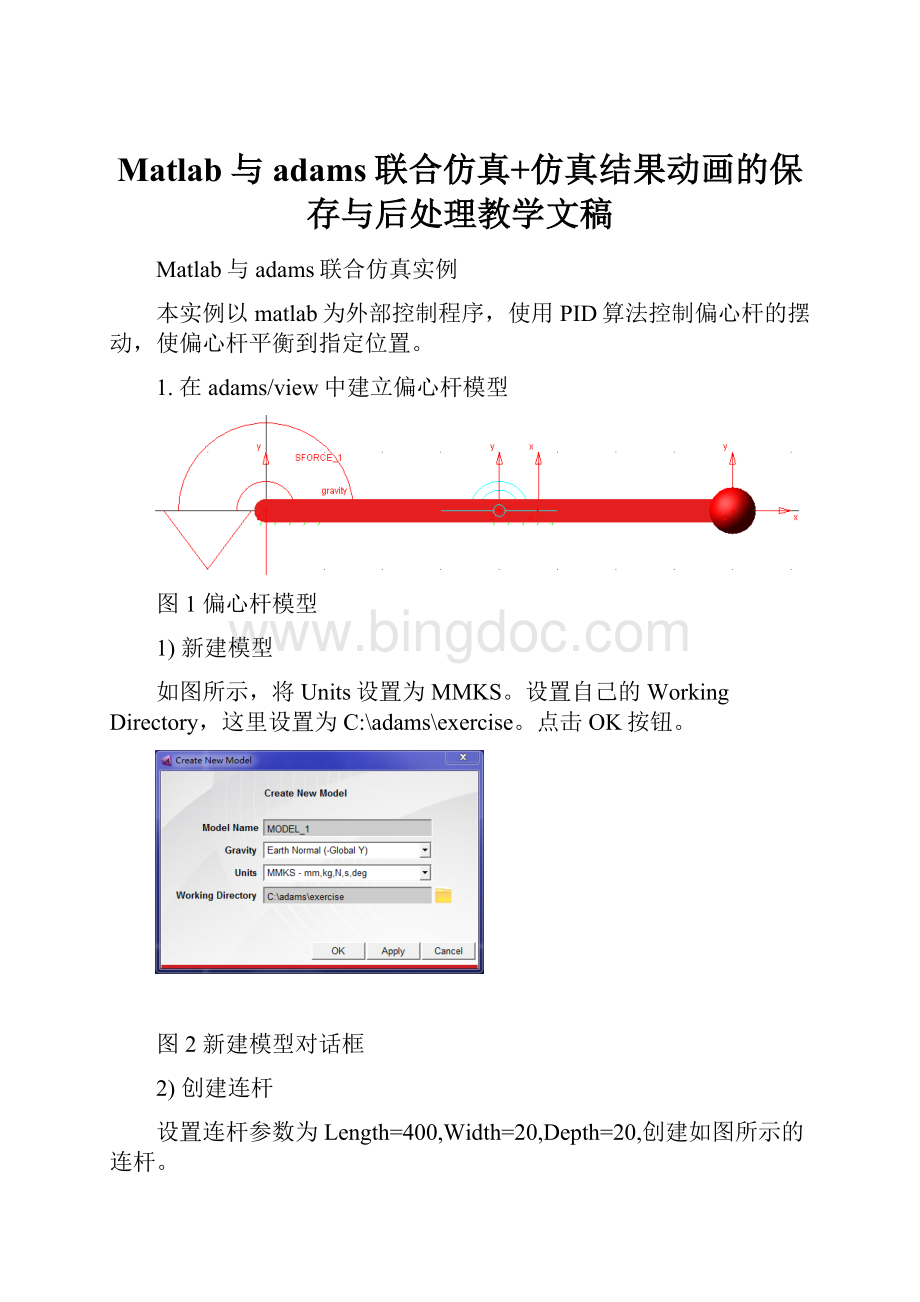
图2新建模型对话框
2)创建连杆
设置连杆参数为Length=400,Width=20,Depth=20,创建如图所示的连杆。
图3创建连杆
3)创建转动幅
在连杆质心MARKER点处创建转动幅,旋转副的参数设置为1Location和NormalTogrid将连杆与大地相连。
图4创建转动幅
4)创建球体
球体选项设置为Addtopart,半径设置为20,单击连杆右侧Marker点,将球体添加到连杆上
图5创建球体
5)创建单分量力矩
单击Forces>
CreateaTorque(SingleComponent)AppliedForces,设置为SpaceFixed,NormaltoGrid,将Characteristic设置为Constant,勾选Torque并输入0,单击连杆,再点击连杆左侧的Marker点,在连杆上创建一个单分量力矩。
图6创建单分量力矩
2.模型参数设置
1)创建状态变量
图7新建状态变量
点击图上所示得按钮,弹出创建状态变量对话框,创建输入状态变量Torque,将Name修改为.MODEL_1.Torque。
图8新建输入状态变量Torque
再分别创建状态变量Angel和Velocity(后面所设计控制系统为角度PID控制,反馈变量为Angel,Velocity为Angel对时间求导,不需要变量Velocity,这里设置Velocity是为了展示多个变量的创建)。
设置Angel的函数AZ(MARKER_3,MARKER_4)*180/PI,Velocity的函数为WZ(MARKER_3,MARKER_4)*180/PI。
(MARKER_3为连杆上的点,MARKER_4为地面上固定的点)AZ(MARKER_i,MARKER_j)表示MARKER_i绕MARKER_j的Z轴旋转的角度,WZ表示MARKER_i绕MARKER_j的Z轴旋转的角速度。
图9新建输出状态变量Angel、Velocity
2)将输入状态变量Torque与模型关联
双击单分量力矩图标,弹出ModifyTorque对话框,修改Function为VARVAL(.MODEL_1.Torque),VARVAL是用于返回Torque的值。
图10将输入状态变量Torque与模型关联
3)指定输入输出变量
点击,右键单击VariableName右边的文本框,如图所示选择Torque。
图11指定输入变量
图12指定输入变量Torque
点击,分别两次右键单击VariableName右边的文本框,分别选择Angel和Velocity。
图13指定输出变量
图14指定输出变量为Angel、Velocity
4)导出控制参数
点击Plugins>
Controls>
Plant_Export。
图15导出控制参数
点击FromPinput,选择PINPUT_1。
图16设置输入输出参数
同样的方法,点击FromPoutput选择POUTPUT_1。
将TargetSoftware设置为MATLAB。
FilePrefix设置为controls_PID,其他按照默认设置不做改动。
图17导出控制参数对话框
3.建立MATLAB控制模型
1)导出ADAMS模型在MATLAB中的模块
启动MATLAB,先将MATLAB的工作目录指向ADAMS的工作目录,方法是修改当前的工作目录为之前在ADAMS中新建模型时的工作目录,这里是C:
\adams。
点击浏览文件夹选择文件夹C:
在命令窗口提示符》下输入Controls_PID,也就是Controls_PID.m的文件名,再在命令提示符》下输入adams_sys,弹出一个新窗口,这个窗口是MATLAB/Simulink的选择窗口其中S-Function方框表示ADAMS模型的非线性模型,即进行动力学计算的模型,State-Space表示ADAMS模型的线性化模型,在ADSMA_sub中包含有非线性方程,也包含许多有用的变量。
图18导出ADAMS在MATLAB中的模块
图19ADAMS在MATLAB中的模块
2)
建立控制方案
在MATLAB/Simulink选择窗口中,单击菜单file>
new>
model或直接单击新建模型按钮,
弹出新的Simulink窗口,单击工具栏中的保存按钮,将新窗口存盘为control_model.mdl(不能与.m文件同名)。
将ADAMS_sub方框拖拽到control_model窗口中,并搭建如图所示控制系统,此控制系统采用角度PID控制对偏心杆的角度进行控制。
也可以采用其他的控制方案。
图20Simulink中PID控制图
3)设置MATLAB与ADAMS之间的数据交换参数
在control_model窗口中双击ADAMS_sub方框,在弹出的新的窗口中双击MSCSoftware,弹出数据交换参数设置对话框,将AdamsSolvertype设置为Fortran(如果设置为C++,ADAMS的构件不会运动,看不到动画效果。
),将Interprocess设置为PIDE(DDE),如果不是在一台计算机上,选择TCP/IP,Animationmode设置成interactive,表示交互式计算,在计算过程中会自动启动ADAMS/View,以便观察仿真动画,如果设置成batch,则用批处理的形式,看不到仿真动画,将SimulationMode设置为continuous,将CommunicationInterval输入框中输入0.005,表示每隔0.005s在MATLAB和ADAMS之间进行一次数据交换,若仿真过慢,可以适当改大该参数,其他使用默认设置即可。
图21数据交换参数设置对话框
4)仿真设置和仿真计算
单击窗口中菜单Simulation>
ModelConfigurationParameters,将StopTime设置为20。
Type设置为Variable-step,其他使用默认选项,单击0K按钮。
单击开始按钮,开始仿真。
(若出现错误,重启MATLAB即可。
每次启动MATLAB都需要选择路径包含Controls_PID.m、Controls_PID.cmd、Controls_PID.adm的文件夹,并输入Controls_PID(.m文件名)和adams_sys(ADAMS与MATLAB的接口命令))。
仿真过程中将自动加载Adams/View窗口,并生成一个aviewAS.cmd的文件,如果你的Adams/View所设置的工作目录中含有此文件,那么启动软件时将不会出现欢迎界面,如果需要在启动时出现欢迎界面必须把此文件删除。
4.结果后处理
在MATLAB示波器中,可以得到角度、角速度和力矩的曲线,Angel、Velocity、Torque的曲线如图所示。
此模型初始受重力作用,产生转动,通过控制力矩地大小,最终角度、角速度、力矩都能达到稳定,角度达到预设值。
控制框图的预设值为幅值为10的阶跃信号,即控制偏心杆的角度为100。
观察角度的变化曲线发现大约在14s时,Angel的值达到预设值10,满足控制要求。
图22角度变化曲线
图23角速度变化曲线
图21角速度变化曲线
图24力矩变化曲线
图25Adams/Viwe中偏心杆在13.3450s时的状态。
在原模型中导入联合仿真结果文件Controls_PID.res(注意ModelName要选择原模型名),这样就可以在adams中进行后处理了。
可以发现在模型树Results中多了一个Controls_PID的结果。
对此结果可以使用adams的后处理模块Postprocessor进行后处理。
图26导入联合仿真结果文件
图26在adams中进行后处理
图27在adsms中对结果进行动画处理
图28adams中力矩后处理结果
 升级会员
升级会员 