最优控制求解停车问题.docx
《最优控制求解停车问题.docx》由会员分享,可在线阅读,更多相关《最优控制求解停车问题.docx(11页珍藏版)》请在冰点文库上搜索。
最优控制求解停车问题
停车问题
1问题描述
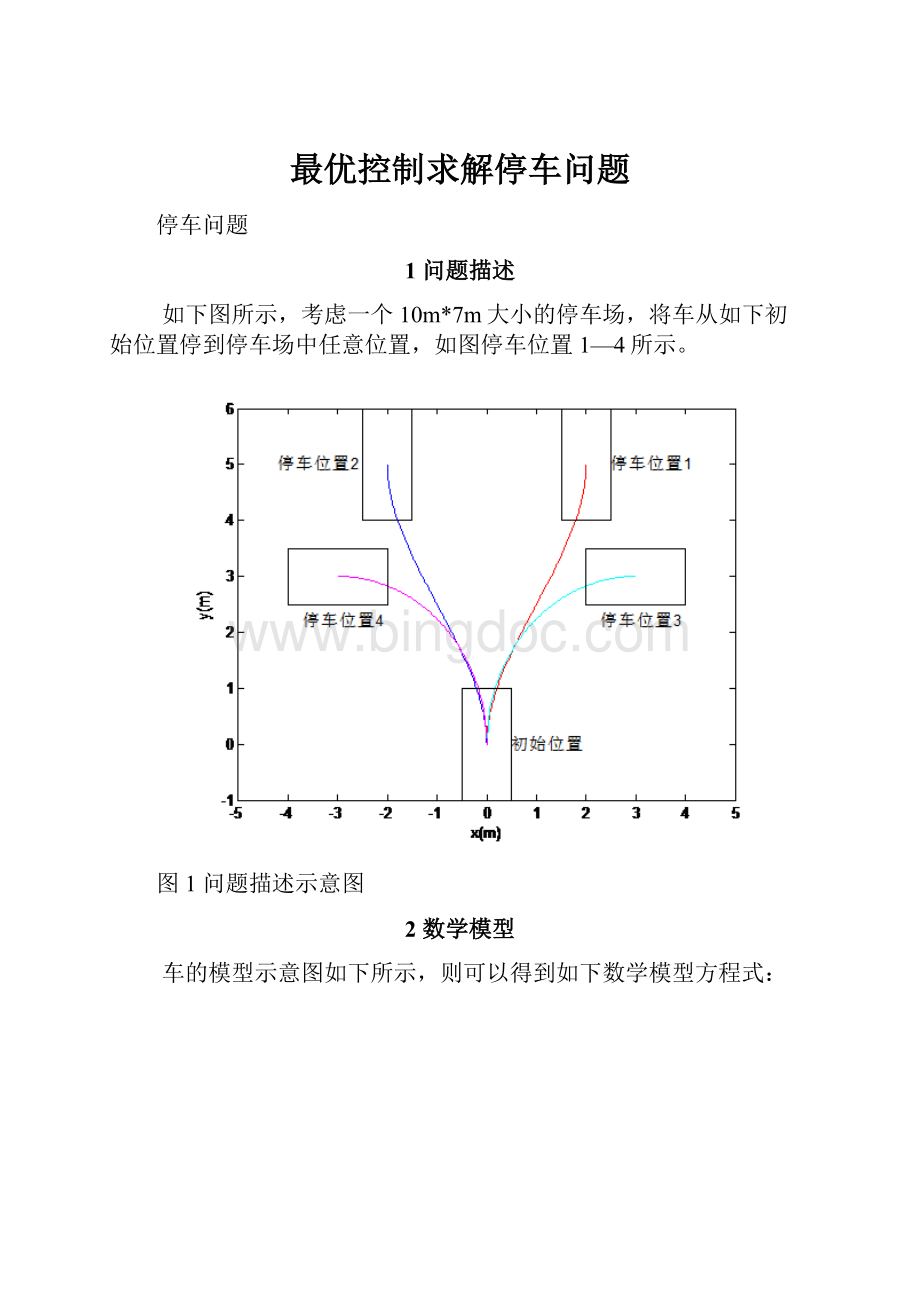
如下图所示,考虑一个10m*7m大小的停车场,将车从如下初始位置停到停车场中任意位置,如图停车位置1—4所示。
图1问题描述示意图
2数学模型
车的模型示意图如下所示,则可以得到如下数学模型方程式:
(1)
图2车的模型示意图
3问题求解
3.1变分法求解最优控制
定义如下性能指标函数:
(2)
通过构建Hamiltonian求解,并采用数值法求解两点边值问题。
(1)停车位置1:
图3变分法求解结果(停车位置1)
(2)停车位置3
图4变分法求解结果(停车位置3)
3.2动态规划法求解最优控制
定义如下性能指标函数:
(3)
采用离散动态规划求解,分别将时间、状态量、控制量、状态方程和性能指标函数离散化。
分别尝试不同的离散化程度。
(1)第一次离散化求解:
运行时间(1120s)
离散化后的维度为:
时间(150);状态(4*10*2*3*6);控制(6*6)
图5动态规划求解结果(第一次离散化)
(2)第二次离散化求解:
运行时间(70291s)
离散化后的维度为:
时间(30);状态(10*25*12*16*15);控制(15*15)
图6动态规划求解结果(第二次离散化)
3.3直接打靶法求解最优控制
定义如下性能指标函数:
(4)
采用SQP方法求解,结果如下:
(1)停车位置1
图7直接打靶法求解结果(停车位置1)
(2)停车位置3
图8直接打靶法求解结果(停车位置3)
3.4模型预测控制求解最优控制
定义如下性能指标函数:
(5)
预测步长
,控制步长
。
(1)停车位置1
图9模型预测控制求解结果(停车位置1)
(2)停车位置3
图10模型预测控制求解结果(停车位置3)
3.5自适应动态规划求解最优控制(尝试)
首先采用经典的HDP92方法进行尝试,但多次试验的效果都不好;之后尝试每次用数值法求解最优的控制量,但效果依旧很差;然后采用值迭代的方法,并尝试用二次型近似值函数和神经网络近似值函数两种方式,但是最后的效果依旧很差(包括一般值迭代和广义值迭代)。
(上述方法对PPT上的例子,效果还不错)
4结果分析
变分法求解最优控制:
针对本问题这样一个相对复杂的模型,变分法无法很好地处理控制量和状态量的约束。
而且在求解过程中,由于无法得到解析解,因而需要采用数值法求解一个两点边值问题。
而在采用BVP4C求解时,需要经过多次初值选择试凑,才能保证可解,否则BVP4C无法求解。
因此只能采用自己编写打靶法程序求解,致使最后的求解结果不是特别好(速度在刚开始一下增加到很大,即加速度过大;针对停车位置3,路径曲线不是很光滑)。
另外,所得结果是一个开环控制。
离散动态规划求解最优控制:
如果对时间、状态、控制的离散化程度太低,则求解结果很差;当增加离散化程度,求解结果有一定的改善,但还远远不够,需要继续提高离散化程度。
然而,由于本问题状态量的维数较大,此时将导致维数灾难问题。
第二次离散化求解的运行时间为70291s(19个多小时),如果继续增加离散化程度,虽然求解结果会更加好,但求解时间会更长。
而针对本问题,如此长的求解时间是没有太多价值的。
直接打靶法求解最优控制:
相比变分法,求解结果更加好。
而且可以比较好地处理控制量和状态量的约束。
但是,最后时刻的控制并不是0,而在实际停车过程中最后时刻控制应该为0。
另外,所得结果是一个开环控制。
模型预测控制求解最优控制:
同样可以比较好地处理控制量和状态量的约束。
而且相比直接打靶法求解,最后时刻的控制能缓慢变为0。
另外,所得结果是一个近似闭环控制,这在实际停车过程中是很有必要的,因为车的每一步运动都会有误差。
自适应动态规划求解最优控制:
我们尝试了几种自适应动态规划的方法,但效果都不是很好。
针对PPT上的例子,这些方法的效果还可以。
在这些例子中,系统最后的稳定状态都是0,而且控制的目标是要使状态尽可能快得到0。
然后,停车问题和这些例子不太相同,并不是使车一下停到终点,状态应该缓慢变化。
所以,可能这些方法不能直接应用于本问题,需要将问题和方法都进行一定的修改,但限于时间因素和自身水平有限,我们没能尝试成功。
 升级会员
升级会员 