汽车总动员竞赛规则.docx
《汽车总动员竞赛规则.docx》由会员分享,可在线阅读,更多相关《汽车总动员竞赛规则.docx(10页珍藏版)》请在冰点文库上搜索。
汽车总动员竞赛规则
“汽车总动员”竞赛规则
一、任务
在一个虚拟的物理环境下,要求机器人在规定的时间从赛道的起点抵达终点。
在赛道中设置多个得分标记和能量补充站,完成得分动作越多、用时越少,得分越高。
在比赛中,参赛队员除了要掌握机器人编程和对物理、力学平衡等知识的应用外,还要考虑如何面对一个多任务的项目,在有限时间通过合理高效的策略取得最好的成绩。
二、竞赛场景
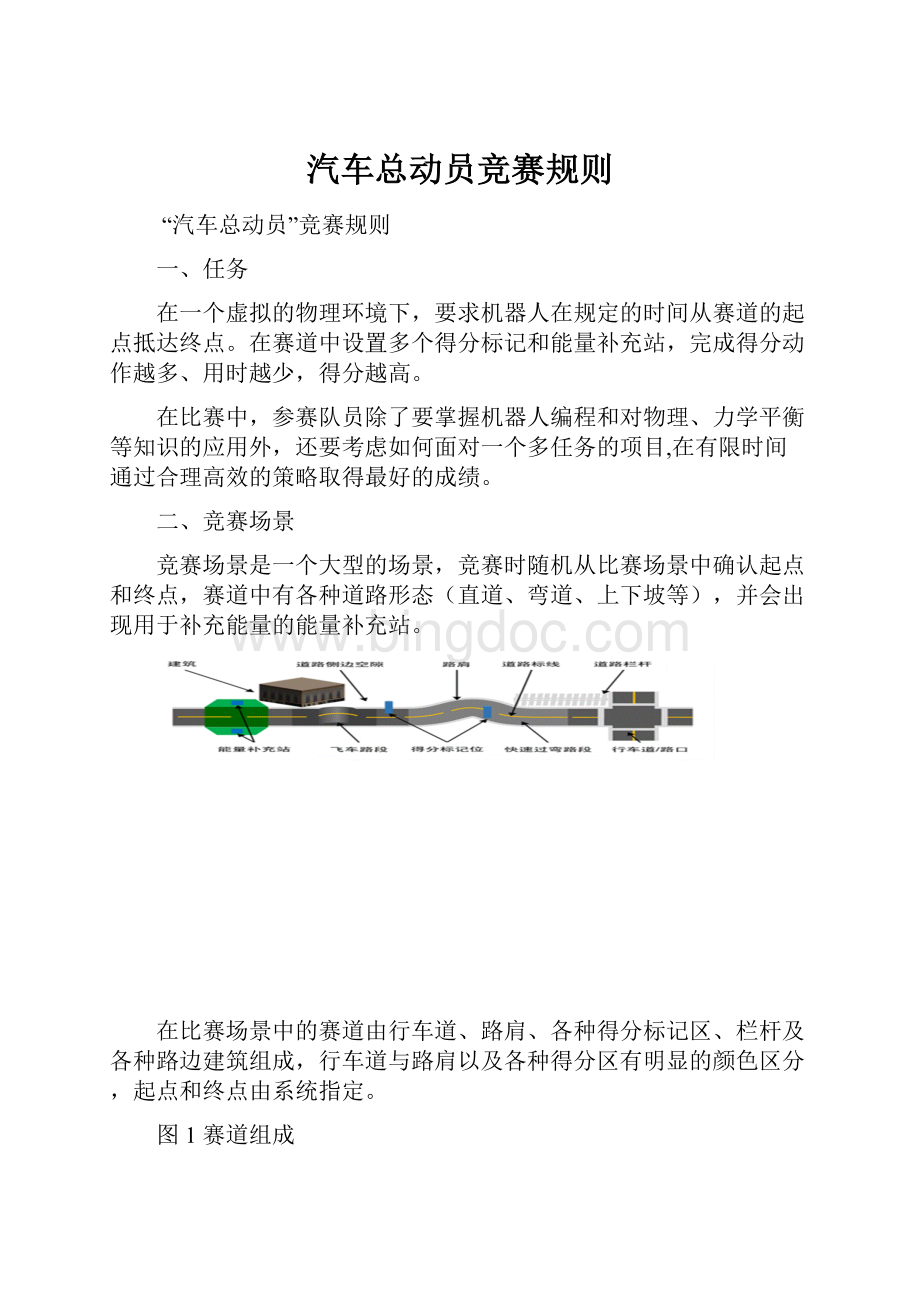
竞赛场景是一个大型的场景,竞赛时随机从比赛场景中确认起点和终点,赛道中有各种道路形态(直道、弯道、上下坡等),并会出现用于补充能量的能量补充站。
在比赛场景中的赛道由行车道、路肩、各种得分标记区、栏杆及各种路边建筑组成,行车道与路肩以及各种得分区有明显的颜色区分,起点和终点由系统指定。
图1赛道组成
竞赛环境中重力加速度为固定值,各种物体有各自的物理属性,参赛队在设计机器人时应考虑各种应对措施。
三、任务规则
(一)竞赛路线
要求机器人从起点出发,在规定时间到达终点,选手可自行选择路线完成任务。
注:
赛道终点有明显可见标记,并提供终点GPS坐标。
(二)赛道变化因素
起始点和终点在赛前指定,赛道中的以下元素可能会产生变化,如:
1.得分标记的数量和位置;
2.快速过弯有效时间;
3.各交叉路口可能会出现数量不等的道路隔离栏杆,包括但不限于以下情形:
图2交叉路口
4.快速过弯得分和飞车得分有效次数将会发生改变。
如指定快速过弯有效得分次数为8次,获得8次得分后的快速过弯得分就不再算分;飞车得分次数以此类推。
快速过弯得分和飞车得分的有效次数将在竞赛时具体指定。
(三)任务中止
任务仿真过程中发生以下情况,将导致当次仿真的终止:
1.超过任务限时;
2.机器人脱离赛道;
3.任务过程中机器人尺寸超出限制;
4.选手手动结束仿真;
任务中止后,选手可选择是否提交当次仿真的成绩。
(四)任务相关时间
1.竞赛时长:
指竞赛的整个过程的时长,选手需在此时长完成搭建机器人、编写控制程序和完成仿真等所有操作。
本次比赛各组别竞赛时长为120分钟。
2.任务限时:
指机器人从起点出发到达终点所用的最长时间,在此时间未到达终点时,任务自动结束。
各组别的任务限时分别如下:
小学组:
160秒;
初中组:
140秒;
高中组:
120秒;
3.任务耗时:
指机器人从起点出发到达终点实际经过的时间。
(五)机器人规格
搭建的参赛机器人应符合以下规格:
1.机器人的直径不能超过5米,具体尺寸以系统的计算结果为准。
机器人在赛道的全程中不能超过此限制。
2.机器人最多可安装5个距离传感器。
3.整个机器人的所有部件(包含控制器、直流电机、轮子、传感器、安装块等部件)的数量不得超过100个。
(六)机器人能量
机器人控制器自带能量,各组别的机器人的能量如下:
小学组:
3000单位能量
初中组:
2000单位能量
高中组:
2000单位能量
(七)任务得分
任务得分的计算公式如下:
任务得分=基础分+附加分+时间奖励分
各分值说明:
基础分:
各组别机器人在任务限时从起点出发到达终点时可获得基础分100分。
附加分:
机器人在任务中有多种获得附加分的方式——标记位得分、快速过弯得分、飞车得分。
机器人在任务限时未成功到达终点,获得的附加分依然有效。
各附加分的分值如下:
标记位得分:
5分;
快速过弯得分:
10分;
飞车得分:
10分
时间奖励分:
机器人在任务限时从赛道起点达到终点时,可获得时间奖励分,其计算公式如下:
时间奖励分=(任务限时–任务耗时)(秒)×1分
(八)名词解释
1.标记位得分:
在赛道中有多个区域会出现能发射红外光的得分标记点,当机器人接触到此得分标记,将获得本处标记位得分。
在机器人获得某标记位的得分后,标记位即消失。
2.快速过弯得分:
在赛道中有一个或多个具有明显标记的弯道,机器人在规定时间通过弯道时,可获得快速过弯得分。
通过弯道的时间在机器人任何一部分进入弯道路段开始计时,在机器人整体离开弯道时停止计时。
通过快速过弯路段后,无论是否获得此快速过弯得分,再次通过时均不会再得分。
3.飞车得分:
在赛道中有一个或多个有明显标记的上下坡路段,机器人经过此路段时,能整体腾飞并在空中滑行超过2米,在机器人驶出此路段时,可获得飞车得分。
飞车距离从机器人整体离开路面时为起点,机器人任何一部再次接触路面时为终点进行计算。
通过飞车路段时,无论是否获得此路段飞车得分,再次通过时均不会再得分。
4.能量补充站:
在机器人运行过程中,各种电子组件需要消耗能量,在机器人自带的能量不足以很好的完成比赛的情况下,可以进入能量补充站补充能量。
能量补充站在赛道中会出现多个,并有明显标记。
只有机器人的控制器在垂直投影上进入能量补充站时才开始补充能量,能量补充站每秒钟为控制器补充100个单位的能量。
机器人可多次进入能量补充站以补充能量。
四、竞赛
(一)竞赛平台
使用竞赛专用虚拟机器人仿真平台(竞赛平台支持使用python编程),选手凭组委会分配的用户名和密码登录省中小学电脑机器人竞赛虚拟机器人比赛平台服务器。
(二)竞赛时长
各组别的竞赛时长为120分钟,要求选手在竞赛时长完成构建机器人、编写控制程序、调试并完成竞赛任务。
在此时长选手可多次修改机器人或控制程序,但修改之后将从起点重新开始仿真。
(三)成绩提交
在各组别选手的成绩提交次数为5次,成绩提交有以下几种情形:
1.任务成功完成后,出现成绩结果时,选手可选择提交本次成绩;
2.超出任务限时,出现成绩结果时,选手可选择提交本次成绩;
3.任务进行过程中,选手可主动结束当前仿真,并可选择提交本次成绩;
4.任务中止时,出现成绩结果时,选手可选择提交本次成绩;
(四)竞赛成绩与排名
选手的竞赛成绩是所有提交的成绩中(最多5次)的最好成绩。
排名以最好成绩为依据,当2个以上选手的最好成绩相同时,比较第2高的成绩,第2高的成绩更好的选手排名靠前,依此类推。
当5次成绩都相同时,通过抽签决定最终名次。
(五)竞赛顺序
竞赛按小学、初中、高中分组进行,同一组别的参赛选手需在同一时段参与竞赛。
(六)比赛安排
竞赛环境由活动主办方提供,参赛选手不得携带U盘、手机等任何具有存储功能的设备进入比赛现场。
在同一组别所有选手入场后,正式发布本次比赛场景,不同组别将随机指定不同的起点和终点。
(七)故障处理
如果竞赛用计算机及竞赛环境中途出现故障(网络中断或死机等),选手可重新启动计算机或更换电脑后继续比赛,之前的比赛信息(机器人、控制程序和已提交过的成绩)将做一定时间的保留,如果裁判认定某一队故意利用本规则获利,该队将受到警告,严重者将取消其比赛资格。
五、
图3赛道平面示意图
场景平面示意图
六、
练习与竞赛过程
练习与竞赛过程如图所示。
图4竞赛过程
(一)注册账号
练习期间需要注册账号。
启动“省中小学电脑机器人竞赛虚拟机器人比赛”客户端软件,在登录界面中单击“注册”,在浏览器中打开注册页面,填写完整信息,单击“注册”并通过激活账号。
在注册成功后记住用户名和密码。
(二)登录
启动“省中小学电脑机器人竞赛虚拟机器人比赛”客户端软件,在登录窗口(见图6)输入已注册并激活的用户名、密码,单击“Go!
”开始登录。
(三)
编辑机器人和控制程序,选择组别和座位
根据规则,选择相应的组别房间,可首先搭建机器人和编写控制程序,并选择好机器人和控制程序,单击房间场地的空座位,开始进入仿真,如图7示。
(四)仿真及编辑机器人和控制程序
编辑机器人
编辑程序
开始
复位
在仿真窗口中,可开始、复位仿真,在停止或复位仿真后可以编辑机器人和控制程序,并可重新开始仿真。
图8仿真窗口
(五)比赛完成
不提交成绩
剩余提交次数
提交成绩
得分
图9仿真窗口
一次仿真结束时或手动结束时,会显示任务得分,可选择提交当前成绩或返回仿真,选择提交时使用一次提交机会。
详情请关注汽车总动员专题网页.irobotq./cars.html
 升级会员
升级会员 