baccini印刷机常见故障排除方法.docx
《baccini印刷机常见故障排除方法.docx》由会员分享,可在线阅读,更多相关《baccini印刷机常见故障排除方法.docx(20页珍藏版)》请在冰点文库上搜索。
baccini印刷机常见故障排除方法
baccini印刷机常见故障排除方法
常见故障的排除
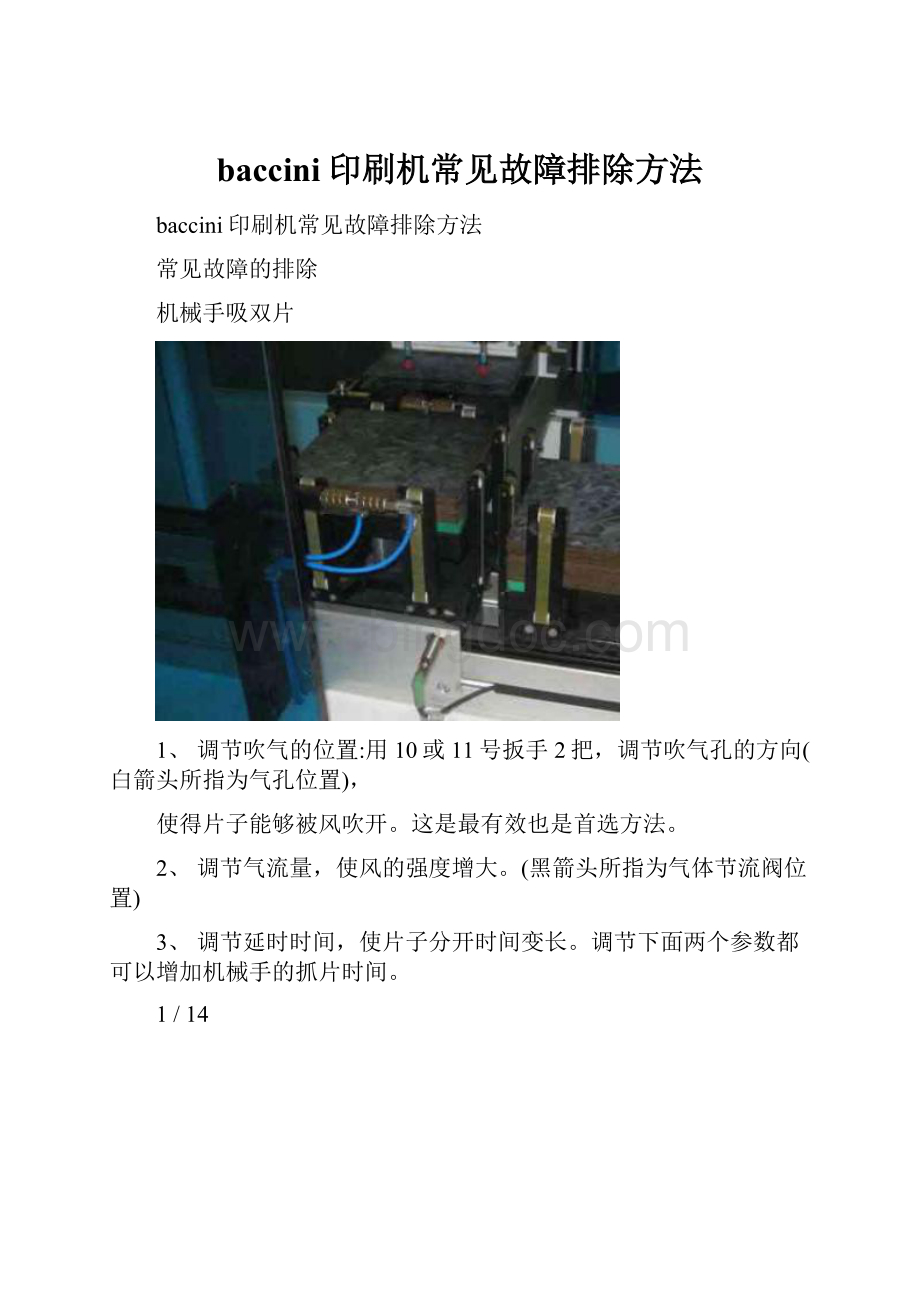
机械手吸双片
1、调节吹气的位置:
用10或11号扳手2把,调节吹气孔的方向(白箭头所指为气孔位置),
使得片子能够被风吹开。
这是最有效也是首选方法。
2、调节气流量,使风的强度增大。
(黑箭头所指为气体节流阀位置)
3、调节延时时间,使片子分开时间变长。
调节下面两个参数都可以增加机械手的抓片时间。
1/14
气孔吹
风时间
吸片器下来
抓片的延时
时间
上料台无法自动上料
其原因一般为对角感应器未接收到信号所致。
带红光的一头是发射端,不带红光的一头是接收端。
解决方法:
观察两端如果都没有红灯则是光纤损坏,立即更换。
如正常则将片盒移走,打开下面盖板,
2/14
在左边可以看见一个光纤放大器,在这里可以看见感应器的状态,先擦拭光纤感应器头部,
看是否只有绿灯亮,如果有表示光纤头部太脏所致;如果还是不行,那么调节下面黄色旋钮,
顺时针为放大,看是否只有绿灯亮;调节到最大还是不行,则调节光纤头部上下位置,调到
只有绿灯亮为止。
绿灯:
只有绿灯一红灯:
红灯亮表示个单独亮才表示
此感应器未接收接收到信号。
到信号。
传送臂错位报警
1、Waitaxisinpositionwindow
3/14
传送臂不能够到达指定位置,因此报警,出来此信息。
解决方法:
1)传送臂里面碎片太多导致,清洁碎片后42-菜单复位即可。
2)加速度太大导致,大的加速度会导致电机无法自由控制。
减小加速度。
3)机械摩擦太大。
手动检查机械摩擦,润滑。
2、Negativepositionlimitexceeded/Positivepositionlimitexceeded
可能对马达设置了一个软件的位置限制,每次马达超过这个限制时,一个停止命令马上
发出,这个错误会出现。
解决方法:
马达参数设置到允许范围之内。
3、Failedtofindelectricalzero
对大部分马达而言复位程序的第一步是测试镀锡卷板的位置(有时机械振动会被误认为
复位程序的开始),如果测试失败则该信息出现。
解决方法:
1)检查译码器工作是否正常。
2)关掉马达的电源(例如按下紧急按钮),检查运动是否由机械振动引起。
3)如果磨擦正常,使用“Composer”Elmo软件重新自动调谐并保存参数。
4、Positionerrorexceeded
马达得到运动的指令时,马达应该沿着Elmo控制器的理论上的运动曲线运动,但运动的过程中会产生误差,这时控制器会增加或减小动力来使误差尽可能小,当这种误差超过控制器的控制范围时,马达停止并提示错误信息。
解决方法:
1)检查马达的机械磨擦,过大的磨擦容易产生大的位置错误,以致Elmo卡关断马达。
2)复位时报此警。
检查HomeSensor是否正常工作。
传送臂进料位置易碎片问题
1、传送臂上下位置不到位
解决方法:
1)调节Help参数:
10_UPPER_POS_INPUT_WB11000017号电机上升位置11_LOWER_POS_INPUT_WB1017号电机下降位置
使得上下位置正好能够正常传输片子,不要有多余的接触,碰撞。
2)调节41-DPHome位置,效果同上。
2、校准片子抓手太紧
解决方法:
调节(增加数值)41-DPHome位置,让抓手张开一些。
3、进料Sensor未感应到
解决方法:
1)擦拭光纤头;
2)打开侧面的盖板会看到一个放大器,按上下箭头可以调节其放大倍数,增大放大倍
数,使感应强度变大。
烘箱托盘运动不到位报警
烘箱定位Sensor错误造成。
解决方法:
打开侧面盖板,看到两个接近式Sensor。
将其位置调节到与感应金属头接近,观察旋转一周无误后盖上盖板。
如果不行请更换此Sensor.
烘箱抓手易碎片问题
4/14
抓手太紧,托盘变形,抓手损坏以及速度太快都可以造成抓手碎片。
、
解决方法:
首先观察碎片的位置,如果指定托盘碎片那么检查托盘;指定抓手碎片检查抓手;其他可在抓手抓片的时候按“cyclestop”看看是否是抓手有些紧,适当增加抓手距离继续观察,也可以适当减小电机速度观察。
挂篮晃动过大,导致翻篮问题
一般是排风过大造成,可以适当调小排风量。
翻片器易碎片问题
翻片器翻转位置不好易造成碎片
解决方法:
拿一个14号开口扳手和一个一字螺丝刀,将翻片器手动打到180?
5/14
用14号开口板将其
扭松,并卡住。
用一字螺丝刀调节,
观察翻片器位置,略
高出横梁即可。
然后用一字螺丝刀卡住卡口,将14号螺丝上紧。
进烧结炉抓手位置错误
抓手太松太紧或者偏移都可以通过调节41-DPHome位置来调节。
有的时候是因为阻力太大造成复位时位置错误,我们可以用手将电机滑动检查,或者打油解决。
再次复位即可。
抓手打开位置太窄可以通过增大Help参数OvenPickupOpenOffset来实现。
6/14
出烧结炉抓手位置错误
1、照相机定位错误;2、测试分选机的炉带测速轮打滑;3、抓片偏移量调节不到位
解决方法:
1)调节照相机的光亮度使得定位准确;重新校准照相机。
详情参看测试照相机校准方法。
2)在下面可以看见测试分选机测速轮的位置。
测速轮位置
7/14
测试分选机测
速轮机构
速轮打滑的现象为下图中的“ActualOvenSpeed”数值跳动很大。
测试机测出
来的速度
清洁测速轮,将测速轮与被测物体压紧。
3)调节上图31-FrontOvenPickup1中“Ovenpickup”调节“X”、“Y”、“T”Offset让抓手抓片子的时候能够抓到正中间。
测试抓手位置报警、位置错误
碎片卡住容易引起测试抓手报警
用手晃动抓手电机,然后运行即可。
如果还是位置错误,需要调节41-DPHome位置。
整体偏移可以调节22-PositionsReleaseCells“ProbeCenteringGrippers”的Offset来整体移动抓手。
8/14
故障:
*001[0E09][01]Aux.Circuitsnotactive–W1
分析:
该信息指出辅助功能未开启,意味着开启马达电源的必要条件未具备,在电气方面关于常规功能的“P2”信号为低电平,0E09输入信号为低电平,马达和一些有条件的输出信号未工作,无条件的输出信号和马达译码器开启,通常在机器开启时或某个紧急按钮被按住时该信息会出现。
处理:
释放所有紧急按钮,按下辅助功能的绿色按钮,检查0E09输入信号是否为高电平。
故障:
*003[Printer][01]MachineAhasn’tbeenreset
分析:
该信息指出自从开机以来,机器A(印刷机)未运行复位程序。
处理:
确保压缩空气与真空已具备。
释放所有紧急按钮。
按下绿色的辅助功能开启按钮。
机器置于自动模式。
点击复位按钮,直至复位程序运行完毕。
故障:
*004[Oven][01]MachineBhasn’tbeenreset
分析处理见003,针对机器B(烘箱)
故障:
*033[0E12][01]Insufficientairpressure–W1
9/14
分析:
压缩空气压力不足
处理:
检查供气是否稳定。
(特别提示该报报警信息会一直提示,即使供气压力已正
常,直
至按下黑色的“alarmreset”按钮。
)
检查机器底部的压力显示,靠近压缩空气连接的地方,工作压力应为6bar。
检查压力传感器,它安装在机器底部并被命名为0E12,如果压力不够高的话,它
的数字显示应该是0,否则为1。
我们可以用一只简单的起子调整。
故障:
*035[0E13][01]Insufficientmainvacuum–W1
分析:
真空压力不足
处理:
检查真空压力是否稳定。
(特别提示该报警信息会一直提示,即使真空压力
已正常,
直至按下黑色的“alarmreset”按钮。
)
检查机器底部的真空压力显示,靠近真空连接的地方,工作压力应为-700毫巴。
检查压力传感器,它安装在机器底底部并被命名为0E13,如果压力不够高的话,
它的数字显示应该是0,否则为1。
我们可以用一只简单的起子调整。
故障:
116[0E14][09]Walkingbeamup(A)-W1
分析:
0E14高电平意味着传送横梁本身在高位置,相反,0E14低电平意味着传送带本
身在低位置。
该信息的解释是,传送横梁在低位置,它应该在高位置,以致程序不能继
续,机器停止并提示错误116。
处理:
在输入-输出页检查有关的输入信号0E14。
该信号取自安装在传送横梁上下气缸表面上的传感器,如果该选项是高电平而错误信息标明“W1”则诊断中可能有误解。
同样,如果该选项是低电平而错误信息标明“W0”则诊断中可能有误解。
在WAGO模块里检查输入信号0E14,每一个输入信号用xExx标明,第一个“x”是节点或
盒号,“xx”是该节点或盒号里面的数字信号,例如0E14就是0号节点或盒号里的14输
入数字信号,不同的盒子被放置在机器的上部,第一个通常在印刷头上面,靠近PC部分,
从正面看节点,可以看到通讯单元,CAN网线连接的地方,几个不同的模块用于数字的
或相似的输入输出信号,这些数字信号被连接在顶上的黄色塑料模块上,每个模块能管
理四个输入信号,它们的状态可以通过黄色塑料下的绿灯检查,从上面的左侧顺时针方
向前进,这样,从最靠近黄色模块通讯单元,输入信号被读作0,1,2,3(第一个模块),
4,5,6,7(第二个模块),8,9,10,11(第三个模块,这样一直下去,因此很容易
地发现0E14,如果它是开着的而输入输出页里却是低电平(或相反),那么可能有一个
软件错误或在输入输出单元有一个配置错误,或者与CAN网卡有一个通讯错误。
10/14
检查信号所来的地方的传感器的状态:
在这个例子中,它被安装在印刷机传送带的上/下气缸表面上,如果传感器是开着的,而WAGO模块里是关着的,(或相反),则从传感器到WAGO的连接电缆可能有问题。
检查传感器本身:
它可能损坏了或者位置发生了偏移。
它很可能因松动而造成状态变化的假象。
检查传感器应该所处的状态,在这个例子中检查传送带的位置,看它是否真的在上面或没有。
检查相关的输出信号:
当传送横梁被要求升上来时,0A15(传送带下降命令)和0E14(传送带上升命令)分别开或关,在输入输出页检查它们的状态是否正确,如果没有发现错误,检查压缩空气的压力。
如果所有的看上去都正确的话,用手动方式检查传送带的移动(向上或向下)。
故障:
*046[Cal][14]Calibrationinprogress分析:
一个相机校准程序正在运行。
处理:
等待该校准程序运行完毕。
故障:
*047[Cal][14]Calibrationerror
分析:
该错误警报通常与在屏幕上另一个窗口出现的有关的相机号的地方一同出现。
它的意思是照相机尺寸收集不完全正确。
处理:
确信正确的程序文件被装载,它通常被命名为“Cal.dat”或“Cal.dat”或“calxxx.dat”,xxx是一版本。
该文件名可以被使用者任意命名。
检查原像:
它可能脏了或不规则了。
检查聚焦和透光(在相机上有两个调整器)。
重做模型:
显像系统把真实的图像和理想的图像相比较,这可能是模型不对,继续“Visionmenu”重做模型(见Cognx操作手册)。
检查搜寻区域,显像系统将只分析搜寻区域。
确信它是足够大以至能够包含提到的不同的标记。
如果开始的地方不够靠近中心,而是靠近搜寻区域的一个边,那么在校准参数页调整它(“CalibrationPositions”)。
11/14
故障:
*048[Cal][14]Linearcalibrationerror
分析:
校准的第一部分直线部分不完全正确,显像系统收集的测量数据和有关的X,Y,
θ轴马达位置不适合被内在的校准运算法则计算。
处理:
重复047错误提示的步骤。
检查X,Y,θ轴马达的移动是否在充许的范围之内。
马达不能在校准限制位置之外工作。
检查马达的正确工作方式,很可能它们在振动,或者在不规则地运动,或者有很大的机械磨擦,或者译码器不工作,所有的这些都能够引起错误。
故障:
*049[][]Angularcalibrationerror
分析处理:
这个错误与048非常相似,但是它与校准的第二部分角度部分关系非常密切,
它包括θ马达,和X,Y一样。
故障:
*043[FILE][]ErrorinaccessingDATA(*.datfiles)
分析:
该讯息表明,当从硬盘里载入一个包含印刷参数(速度,压力,网间距等)的数据时发生了错误。
处理:
访问的文件不存在或且被破坏了,或且被改动了并用Baccini程序以外的错误格式保存,也可能文件被移到了别的文件夹,“Data”是默认文件夹,还原文件到正确的文件夹或从备份文件夹里拷贝。
如果没有文件的拷贝,可以下载一个相近的配方,修改并“另存为”你丢失的文件名。
和印刷参数一起,图像参数也被下载了。
它们被包含进一对和印刷参数同名的文件里,但有不同的扩展名:
“*.te_”(ASCII文件)和“*.tel”(COGNEX格式)。
确信它们存在并没有被破坏,否则寻找一个备份拷贝或者用一个相以的配方修改并重新创建。
故障:
*044[FILE][]ErrorinaccessingAXES(axesparameterfile)
分析:
该信息表明当从硬盘里装入一个Elmo轴参数文件时发生了错误,它包含速度,加
速度,减速度等所有Elmo轴控制参数。
处理:
这个文件被放置在与机器软件相同的文件夹里,处理方法同043。
故障:
*042[Axes][]Checkpage42-Elmomanual,errorwithElmoMGxx
分析:
马达MGxx发生了错误(xx是一个从10开始的数字)。
处理:
到Elmo轴手册42页选择马达MGxx。
在42页检查错误报告。
故障:
*Elmodrivernotoperational
分析:
该信息意思是无法与Elmo驱动卡通讯。
处理:
检查Elmo卡的连接。
拔下并重新插上卡的连接网线。
关上机器再重新启动。
故障:
*Motorshortcircuit
分析:
在这个例子中Elmo卡检测到一个短路故障。
处理:
检查马达到Elmo卡的连接线。
12/14
检查马达连接器本身。
故障:
*Motorfailure
分析处理:
该信息总是与直接来自附加的Elmo文档的详细解释一起出现(见MF=MotorFailure)。
故障:
*Stoppedbyalimitswitch
分析:
如果硬件限位开关被触发这种错误会出现,当马达的位置超出限位开关的限制范围时,限位开关会被触发。
处理:
移动马达到限制范围内。
复位马达。
故障:
*Externalinhibit
分析:
当关于Elmo卡的“使能”输入信号被关闭时该信息通常会出现。
处理:
打开所有的紧急按钮,按下绿色的的辅助按钮。
“使能”信号应该会打开。
检查信号(标明“En”)的电气连接。
故障:
*Positionerrorexceeded
分析:
马达得到运动的指令时,马达应该沿着Elmo控制器的理论上的运动曲线运动,但
运动的过程中会产生误差,这时控制器会增加或减小动力来使误差尽可能小,当这种误
差超过控制器的控制范围时,马达停止并提示错误信息。
处理:
确保电源打开(辅助电路)。
按下开始按钮并等几分钟,马达会自动复位。
检查马达的机械磨擦,过大的磨擦容易产生大的位置错误,以致Elmo卡关断马达。
在Elmo参数页检查速度,加速度,减速度值是否被改变,举例来说,很大的加速度和减速度使马达沿着理论的曲线运动有一点困难。
复原原始值。
在Elmo参数页检查当前的限制范围是否被改变,很狭窄的限制范围使马达沿着理论的曲线运动有一点困难。
复原原始值。
故障:
*Failedtofindelectricalzero
分析:
对大部分马达而言复位程序的第一步是测试镀锡卷板的位置(有时机械振动会被
误认为复位程序的开始),如果测试失败则该信息出现。
处理:
关掉马达的电源(例如按下紧急按钮),检查运动是否由机械振动引起。
如果磨擦正常,使用“Composer”Elmo软件重新自动调谐并保存参数。
检查译码器工作是否正常。
故障:
*Positivepositionlimitexceeded
分析:
可能对马达设置了一个软件正的位置限制,每次马达超过这个限制时,一个停止命令马上发出,这个错误会出现。
处理:
马达回到允许范围之内。
复位马达。
13/14
故障:
*Negativepositionlimitexceeded
分析处理:
这个错误与上面的错误非常相似,只是它是一个负的位置限制。
故障:
*Time-outPDO2message
分析:
当在CAN网络通讯发生超时错误时,该信息会出现。
处理:
在Elmo卡上断开CAN连接器,再重新连上。
关掉机器,重新启动。
故障:
*Motorhardwarefault
分析:
当热保护电路发现马达过热并关掉它时该信息出现。
处理:
检查从马达到Elmo卡的连接电缆。
检查传感器是否正确工作。
确信马达没有被卡住。
机械故障将引起马达过热。
故障:
*Waitaxisinpositionwindow
分析:
当一个程序要求轴在某一位置而它没有时,该信息会出现。
处理:
机器置于手动模式,进入到Elmo手册页,选择当前轴,停下马达的正常运动,每一次指
定轴到一个新的位置,运动停止后实际的位置应该与设置的位置一致,如果不是的话,
检查机械磨擦。
复位整个机器。
14/14
 升级会员
升级会员 