国外相关星载SAR及InSAR卫星的系统参数.docx
《国外相关星载SAR及InSAR卫星的系统参数.docx》由会员分享,可在线阅读,更多相关《国外相关星载SAR及InSAR卫星的系统参数.docx(4页珍藏版)》请在冰点文库上搜索。
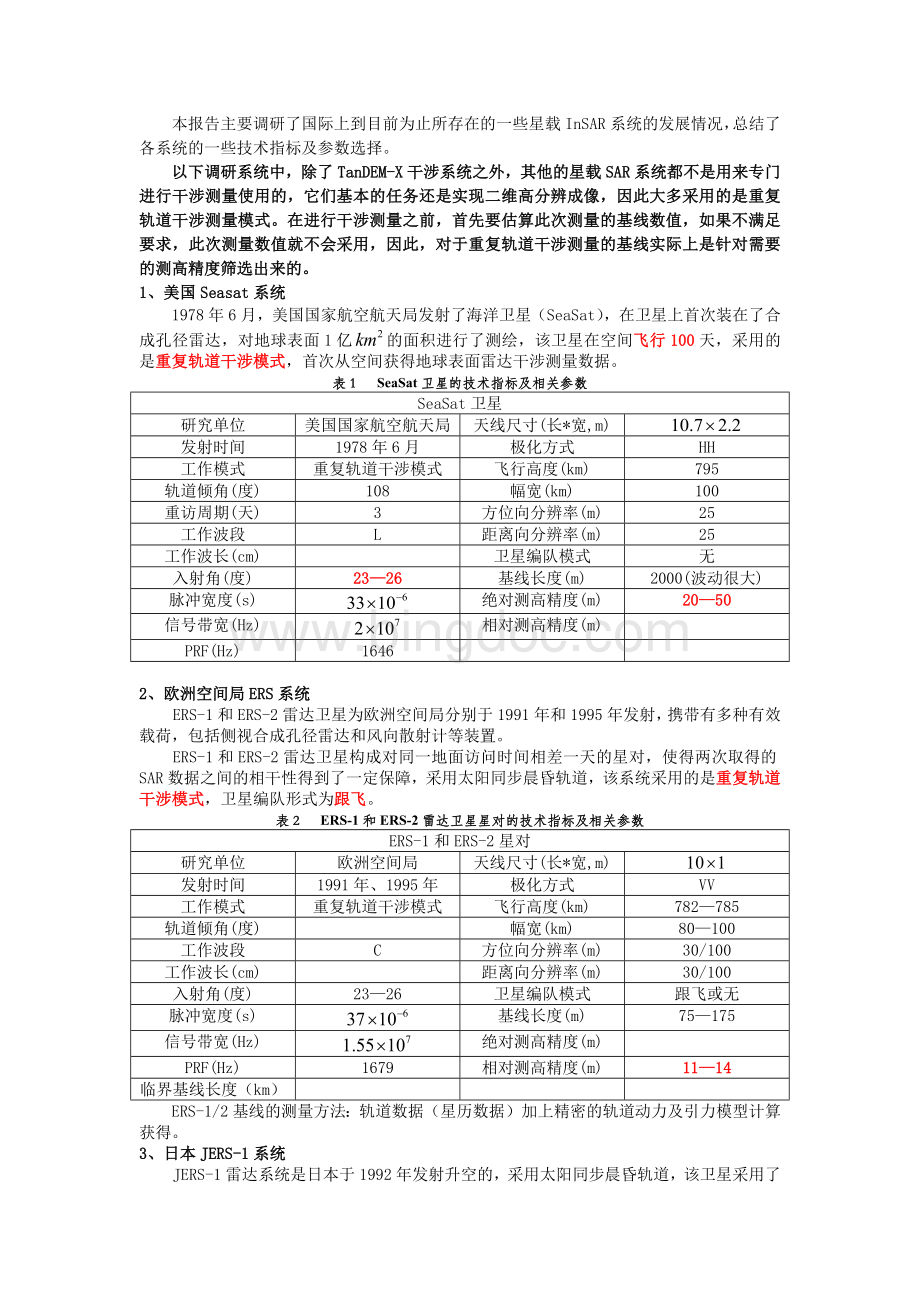
本报告主要调研了国际上到目前为止所存在的一些星载InSAR系统的发展情况,总结了各系统的一些技术指标及参数选择。
以下调研系统中,除了TanDEM-X干涉系统之外,其他的星载SAR系统都不是用来专门进行干涉测量使用的,它们基本的任务还是实现二维高分辨成像,因此大多采用的是重复轨道干涉测量模式。
在进行干涉测量之前,首先要估算此次测量的基线数值,如果不满足要求,此次测量数值就不会采用,因此,对于重复轨道干涉测量的基线实际上是针对需要的测高精度筛选出来的。
1、美国Seasat系统
1978年6月,美国国家航空航天局发射了海洋卫星(SeaSat),在卫星上首次装在了合成孔径雷达,对地球表面1亿的面积进行了测绘,该卫星在空间飞行100天,采用的是重复轨道干涉模式,首次从空间获得地球表面雷达干涉测量数据。
表1SeaSat卫星的技术指标及相关参数
SeaSat卫星
研究单位
美国国家航空航天局
天线尺寸(长*宽,m)
发射时间
1978年6月
极化方式
HH
工作模式
重复轨道干涉模式
飞行高度(km)
795
轨道倾角(度)
108
幅宽(km)
100
重访周期(天)
3
方位向分辨率(m)
25
工作波段
L
距离向分辨率(m)
25
工作波长(cm)
卫星编队模式
无
入射角(度)
23—26
基线长度(m)
2000(波动很大)
脉冲宽度(s)
绝对测高精度(m)
20—50
信号带宽(Hz)
相对测高精度(m)
PRF(Hz)
1646
2、欧洲空间局ERS系统
ERS-1和ERS-2雷达卫星为欧洲空间局分别于1991年和1995年发射,携带有多种有效载荷,包括侧视合成孔径雷达和风向散射计等装置。
ERS-1和ERS-2雷达卫星构成对同一地面访问时间相差一天的星对,使得两次取得的SAR数据之间的相干性得到了一定保障,采用太阳同步晨昏轨道,该系统采用的是重复轨道干涉模式,卫星编队形式为跟飞。
表2ERS-1和ERS-2雷达卫星星对的技术指标及相关参数
ERS-1和ERS-2星对
研究单位
欧洲空间局
天线尺寸(长*宽,m)
发射时间
1991年、1995年
极化方式
VV
工作模式
重复轨道干涉模式
飞行高度(km)
782—785
轨道倾角(度)
幅宽(km)
80—100
工作波段
C
方位向分辨率(m)
30/100
工作波长(cm)
距离向分辨率(m)
30/100
入射角(度)
23—26
卫星编队模式
跟飞或无
脉冲宽度(s)
基线长度(m)
75—175
信号带宽(Hz)
绝对测高精度(m)
PRF(Hz)
1679
相对测高精度(m)
11—14
临界基线长度(km)
ERS-1/2基线的测量方法:
轨道数据(星历数据)加上精密的轨道动力及引力模型计算获得。
3、日本JERS-1系统
JERS-1雷达系统是日本于1992年发射升空的,采用太阳同步晨昏轨道,该卫星采用了重复轨道干涉模式,但其轨道控制方式不太理想,在交轨方向的基线分量不如日本之后发射的ALOS卫星。
表3中的基线长度是对JERS-1持续观测四年(1993年—1994年)期间的基线变化范围。
表3JERS-1雷达卫星的技术指标及相关参数
JERS-1卫星
研究单位
日本
极化方式
HH
发射时间
1992年
飞行高度(km)
568
工作模式
重复轨道干涉模式
幅宽(km)
75
轨道倾角(度)
方位向分辨率(m)
18
工作波段
L
距离向分辨率(m)
18
工作波长(cm)
基线长度(m)
87—707
入射角(度)
35
绝对测高精度(m)
卫星编队模式
无
相对测高精度(m)
10—25
4、加拿大Radarsat雷达卫星
雷达卫星Radarsat除了有一个地面卫星数据接收站外,卫星上还载有磁带记录器,可覆盖全球。
该卫星除陆地及海洋应用外,其还肩负两个方面的重要任务:
一是对南极大陆提供第一个完全的高分辨率卫星覆盖,二是对全球产生多次卫星覆盖。
Radarsat雷达卫星由加拿大于1995年11月4日发射,具有7种模式、25种波束及不同入射角,因而具有多种分辨率、不同幅宽和多种信息特征,使用于全球环境、土地利用和自然资源监测等。
表4Radarsat雷达卫星的技术指标及相关参数
Radarsat卫星
研究单位
加拿大
极化方式
HH
发射时间
1995年11月4日
飞行高度(km)
793—821
工作模式
重复轨道干涉模式
幅宽(km)
45—500
轨道倾角(度)
方位向分辨率(m)
9—100
工作波段
C
距离向分辨率(m)
6—100
工作波长(cm)
基线长度(m)
286—1978
入射角(度)
10—60
绝对测高精度(m)
卫星编队模式
无
相对测高精度(m)
15—50
5、美国SRTM任务
2002年2月美国“奋进”号航天飞机发射升空,执行耗资亿美元,称为“航天飞机雷达测绘使命(SRTM)”的空间飞行任务。
它采用的方式为单航过双天线干涉测量,即在航天飞机上构建双天线实施InSAR地形测绘。
该任务历经11天顺利完成任务,共计进行了222小时23分钟的数据采集工作,获取的雷达影像数据达万亿字节,数据覆盖范围在北纬60°至南纬56°之间,覆盖面积超过亿,数据产品为间距30m和90m的数字高程模型数据,相对测高精度为6m。
(天线直径,交轨基线长度60m,顺轨基线长度7m,采用频段C/X,绝对测高精度:
水平20m,垂直16m,相对测高精度:
水平15m,垂直4m)。
6、欧洲ENVISAT雷达系统
ENVISAT雷达卫星属极轨对地观测卫星系列之一,于2002年3月升空。
星上载有10种探测设备,其中4中是ERS-1/2所载设备的改进型。
作为ERS-1/2雷达卫星的延续,ENVISAT雷达卫星数据主要用于检测环境,即对地球表面和大气层进行连续的观测,供制图、资源勘查、气象及灾害判断之用。
表5ENVISAT雷达系统的技术指标及相关参数
ENVISAT卫星
研究单位
欧洲
极化方式
HH,VVHH/VVHH/HV,VV/VH
发射时间
2002年2月
飞行高度(km)
786—813
工作模式
重复轨道干涉模式
幅宽(km)
56—405
轨道倾角(度)
方位向分辨率(m)
6—1000
工作波段
C
距离向分辨率(m)
9—1000
工作波长(cm)
基线长度(m)
213—2230
入射角(度)
15—45
绝对测高精度(m)
卫星编队模式
无
相对测高精度(m)
10—40
7、日本ALOS观测卫星
2006年1月日本发射了先进陆地观测卫星(ALOS),它携带有L波段相控阵合成孔径雷达(PALSAR),该卫星主要用于对全球陆地资源和环境实施全天候监测,在高分辨率模式下距离向分辨率优于2m,轨道定位精度10m。
PALSAR有较高的距离向分辨率和较高的信噪比,并且在交轨方向对轨道有较好的控制。
表6ALOS观测卫星的技术指标及相干参数
ALOS卫星
观测模式
高分辨率模式
扫描模式
多极化模式
极化
HH/HV或VV/VH
HH或VV
HH/VV/HV/VH
侧视角(度)
10—60
18—43
8—30
距离向分辨率(m)
10(2视)/20(4视)
100(多视)
24—89
扫描幅宽(km)
40—70
250—350
20—65
数据率(M)
240
天线尺寸
*
工作模式
重复轨道干涉模式
基线长度(m)
交轨大于50m,顺轨小于2公里
绝对测高精度(m)
相对测高精度(m)
10—20
8、加拿大Radarsat-2雷达系统
Radarsat-2是加拿大第二代地球观测卫星,于2006年12月发射升空,它几乎保留了Radarsat-1的所有优点,雷达采用C波段,HH极化,数据分辨率3—100m,幅宽10—500km,设计使用寿命为7年,采用多极化工作模式,轨道定位精度15m。
能够大大增加可识别地物或目标的类别,能够左视和右视,并且可以实现相互转换,主要用于测绘以及环境和自然资源的检测等方面。
表7Radarsat-2卫星的主要性能指标及相关参数
Radarsat-2卫星
轨道参数
倾角(度)
重访周期(天)
使用寿命(年)
轨道高度(km)
轨道
°
24
7
798
极轨,太阳同步轨道
可选极化方式
部分波束模式
标称分辨率
距离*方位(m)
标称幅宽(km)
HH,HV,VH,VV
标准
35*28
100
宽幅
38*28
150
精细
10*8
50
HV或VH
精细(1/4景)
11*9
25
HH或VV
超精细宽
3*3
20
超精细窄
3*3
10
相对测高精度(m)
2—20
基线长度(m)
顺轨小于2公里
编队形式
前后跟飞
标称间距(m)
10
9、德国TanDEM-X任务
德国TanDEM-X任务是利用两颗TerraSAR-X卫星进行编队飞行的一个高精度的雷达干涉测量系统,第一颗TerraSAR-X卫星于2007年发射升空,计划使用寿命为5年,第二颗TerraSAR-X卫星于2009年发射升空,计划使用寿命为5年,两颗卫星有三年的工作交叠期,德国预计在这三年中生成全球的高精度DEM数字高程模型,高程定位精度优于2m,DEM网格间距为12m。
表8TanDEM-X干涉系统的性能指标及相关参数
TanDEM-X干涉任务
交轨基线
顺轨基线
基线测量
轨道
系统寿命
300m—2km
小于2km(一发双收)
200m—2km(双发双收)
2mm—4mm
太阳同步轨道
大于5年
SAR基本参数
SAR模式
波段
入射角
分辨率
像素定位精度
条带,少量扫描
X
25°—50°
6m(4视)
小于5m
数字高程模型(HRTI-3)
垂直精度
水平精度
DEM间距
2m—4m(相对),10m(绝对)
10m
12m
卫星编队模式
前后跟飞、并列绕飞
表9给出了以上几种星载干涉系统在不同基线的情况下高程模糊度的具体数值
表9不同垂直基线下的高程模糊度(单位:
m)
垂直基线长度
卫星
SEASAT
JERS-1
ALOS
ERS-1/2
ENVISAT/ASAR
RADARSAT
TerraSAR-x
125
294
323
91~563
69
58~81
31~155
21~56
200
184
206
57~352
43
37~51
20~97
14~35
500
74
83
23~141
17
15~21
8~39
6~14
不同波段下系统干涉的性能比较
表10上述几种星载干涉系统的相对测高精度对比
系统名称
相对测高精度(m)
SeaSat海洋卫星(L波段)
20—50
ERS-1和ERS-2星对(C波段)
11—14
JERS-1卫星(L波段)
10—25
Radarsat-1卫星(C波段)
15—50
ENVISAT系统(C波段)
10—40
ALOS卫星(L波段)
10—20
Radarsat-1和Radarsat-2星对(C波段)
2—20
TanDEM-X干涉系统(X波段)
2—4
L、X、C波段所生成的SAR图像有其各自的特点,高程信息的精度主要取决于雷达波长和相干系数。
对于同一区域的SAR图像干涉处理,L波段的图像相干性高于X、C波段的图像,但是就高程信息的敏感度,X、C波段优于L波段。
 升级会员
升级会员 