三阶系统综合分析与设计Word下载.docx
《三阶系统综合分析与设计Word下载.docx》由会员分享,可在线阅读,更多相关《三阶系统综合分析与设计Word下载.docx(14页珍藏版)》请在冰点文库上搜索。
于开环零点(包括无限零点)。
根据系统开环传递函数k可知:
系统
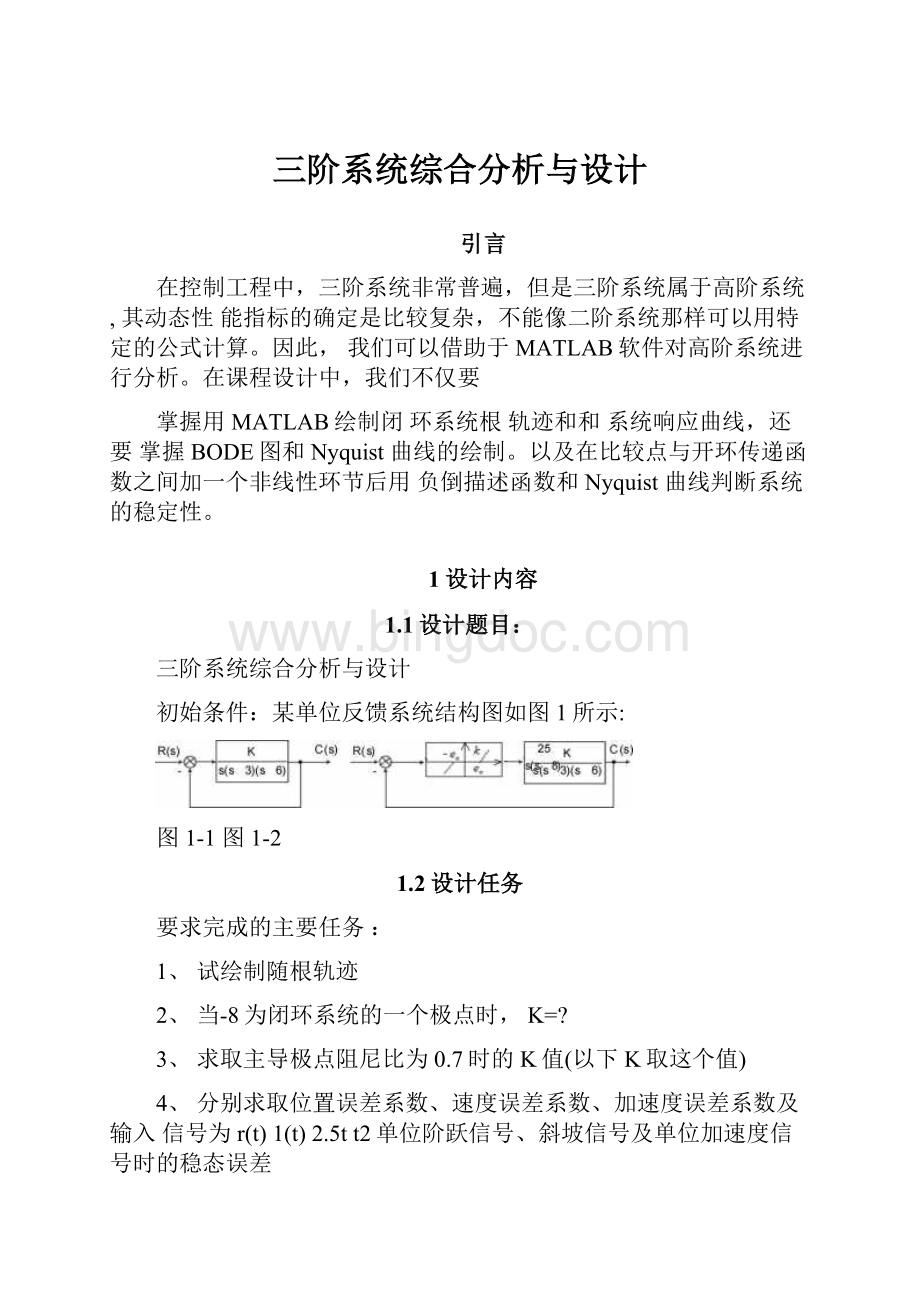
s(s3)(s6)
根轨迹有3条分支,开环零点无限远,有三个开环极点,分别是0,-3,-6。
2、实轴上的根轨迹是那些在其右侧开环实数零点和开环实数极点总数和为
奇数的区间,所以该系统根轨迹在实轴上的区间为(-%,-6]、[-3,0]。
3、该系统根轨迹有3条渐近线,求渐近线与实轴交点,得[-3.0j],而渐近线
与实轴正方向的夹角为m1,既有-,,5。
则可绘制系统根轨迹渐近线。
333
4、根轨迹与虚轴的交点;
闭环系统的特征方程:
1
s(s3)(s6)
即s3
9s218sk
令sj代入上式,可得:
318
解得3^2
5、根轨迹的分离点:
11
解得d33
d0d(
3)d(6)
MATLAB为绘制根轨迹编程如下:
num=[1];
den=[19180];
syms=tf(num,den);
rlocus(syms)
绘制出的根轨迹如图2-1所示:
O
1.
■
RootLocus
图2-1闭环根轨迹
2.2求取当闭环系统的一个极点为-8时的k值
闭环系统的特征方程为:
32
s39s218sk0
令G(s)=0,将闭环极点s8代入方程式中,从而可以得到k=80.所以当-8为闭环系统的一个极点时,k等于80。
2.3求主导极点阻尼比为0.7时的K值
系统的动态性能基本上由接近虚轴的闭环极点确定,这样的极点被称为主导极点。
故主导极点定义为对整个时间相应过程中起到主要作用的闭环极点,只有
既接近虚轴,又不十分接近闭环零点的闭环极点才能成为主导极点。
在全部闭环极点中,选取最靠近虚轴又不十分靠近闭环零极点的一个或几个闭环极点作为主导极点,略去不十分接近原点的偶极子,以及比主导极点距虚轴
远6倍以上的闭环零、极点。
该系统中只有无限远零点,极点分别是0、-3、-6,其中0及-3比-6更加
靠近虚轴,可以作为主导极点,-6则可忽略,对系统的影响较小。
s3sk
2
又典型二阶系统的闭环传递函数为:
(s)-n2
0.7,可以求
s2nSn比较上式,可得kn,2n3,又系统主导极点阻尼比
得n2.143,k4.59
2.4稳态误差及稳态误差系数的计算
控制系统的稳态误差数值,与开环传递函数G(s)H(s)的结构和输入信号R(s)
的形式密切相关,对于一个给定的稳定系统,当输入信号形式一定时,系统是否存在稳态误差就取决于开环传递函数描述的系统结构。
一般,分子阶次为m,分母阶次为n的开环传递函数课表示为:
m
G(s)H(s)
K「(i1)
vmv
svjQs1)
2.4.1误差系数的求取
1、若r(t)R1(t),R为输入阶跃信号的幅值,则
R(s)=R/s,此时有稳态误差
R
1帆G(s)H(s)
1KP
静态位置误差系数Kp=limG(s)H(s)
s0
2、若r(t)Rt1(t),R为输入速度信号的幅值,则R(s)=R/s2,此时有稳态误差
RR
ess
limsG(s)H(s)KV
459
静态速度误差系数KvlimsG(s)H(s)lim―一0.255
s0s0(s3)(s6)
3、若r(t)Rt2/2,R为输入加速度信号的幅值。
则R(s)R/s3,此时有稳态
误差
lims2G(s)H(s)
静态加速度误差系数Kalims2G(s)H(s)lim4.59S0
s0s0(s3)(s6)
4、则当输入信号为r(t)1(t)2.5tt2时,稳态误差的求法如下:
首先将输入信号r(t)分解为三个信号的叠加:
弾)1(t),r2(t)2.5t」3(t)t2
r(t)A(t)b(t)
“(t)。
输入信号R(t)
的稳态误差就是信号
态误差的和。
输入信号为
R(t)
1(t)时,稳态误差
ess/
Kp
G(t)
2.5t,时,稳态误差ess
2.5
Kv
0.255
D(t)
t时,稳态误差
Ka
所以输入信号r(t)的稳态误差为ess
A(t)、D(t)、b(t)的稳
11.11
2.5绘制单位阶跃响应曲线
绘制单位阶跃响应利用的函数是step函数
MATLAB绘制单位阶跃响应曲线编程如下:
num=[4.59];
den=[19184.59];
step(tf(num,den))
2-2所示:
绘制出的单位阶跃响应曲线如图
图2-2单位阶跃响应曲线
由图中可以看到单位阶跃响应最终趋向于1,所以稳态误差为0,所以该系
统是稳定的。
2.6绘制BODE图和Nyquist曲线及求取幅值裕度和相角裕度
2.6.1绘制BODE图
Bode图又称对数频率特性曲线图,由对数幅频曲线和对数相频曲线组成,是工程中广泛使用的一组曲线。
绘制轨迹利用的函数是bode函数:
G(s)
4.59
0.225
s(s/31)(s/61)
1、将传递函数写成伯德标准型,确定开环传递系数和各转折频率。
系统的开环频率特性为
j(j/31)(j/61)
由伯德标准型容易看书,开环传递系数为K0.225,转折频率为13,
2、确定低频段:
由传递函数可知该系统为1型系统,即有微分环节,所以
绘制低频段,可过1,L
(1)20logK20log0.22512.96作一条斜率为
-20dB/dec的斜线。
3、绘制开环对幅频特性的渐近线:
将低频段延伸到第一个转折点频率
13处。
因为第一个转折频率是惯性环节的转折频率,所以,开环对数频率特
性的渐近线下降20dB/dec,再延伸到第二个转折频率20.5处,因为也是惯性
环节,所以再下降20dB/dec。
4、绘制相频特性:
绘制各个环节的对数相频特性曲线,然后逐点叠加。
一般在一些特征点上进行叠加,如各个转折频率处。
5、修正对数幅频特性。
MATLAB绘制9BODE图编程如下:
bode(num,den);
gridon
绘制出的BODE图如图2-3所示:
BodeDi殖ram
50
-
00
'
I
Il1II11
1■
11
HH
1i
i
J
1i1
-1
T
-i~rri-i
■一(--
~r
~T
~rr
T
_"
1_
~i1
~1~r
itr
ri
-r~
_r
-T-
r
—
l>
•
i>
ii<
ii
>
1N
t1
bl<
14
ii
iPV
iiiiii
E1
1[1
111
IIl<
II
l
i1
Il>
II
*<
1I
iah■I
i■
■i
■ii
ici
■I
i■i
ii
Ii■*■-!
■■
4
■rl
5
3
J1-
eo
._
10
Frsquency(r^d/sec)
R(s)
/
%
25KC(s)
sG(s8)3)(s6)
图2-6加入非线性环节的反馈结构图
根据系统结构图可知该非线性类型为死区特性,又其中
e01,k2
2.7.2
系统稳定性的判定
由描述函数可知负倒数函数为
实轴交于
-0.02833,没有包围
N(A)曲线,根据非线性系统稳定判据,该系统
N(A1)
稳定。
-0.12
-0.1
-□.OS
-0.06
RealAxis
-0.04
-0.020
NyqLiistDiagram
图2-6奈氏曲线放大图
3体会和总结
通过这次自动控制原理课程设计,我学到了关于MATLAB方面的很多知识,
MATLAB它有着强大的数据处理能力,处理速度快,精度高,它不仅可以用来绘制曲线,而且可以用来帮助解方程,以及做仿真处理,帮助验证理论分析的真确性。
这次我做的是一个三阶系统的综合分析和设计,主要完成的任务是绘制根轨
迹、绘制单位阶跃响应、求稳态误差、绘制BODE图和Nyquist曲线、求幅值裕
度和相角裕度以及加入非线性死区利用负倒描述函数和Nyquist曲线来判断系
统的稳定性。
这些问题在课堂上老师都讲过,但是做起课程设计时还是遇到了一点困难,对于加入非线性死区利用负倒描述函数和Nyquist曲线来判断系统的稳
定性这方面我比较陌生。
但是通过翻阅资料,认真分析,我最终还是解决了问题。
这次课程设计是对平时学习的一个检验,我不仅学会了用理论来分析检验实践,也学会了用实践来验证理论,总的来说,通过这次课程设计我受益匪浅。
参考文献
[1]王万良编.《自动控制原理》,高等教育出版社,2008.6
[2]胡寿松编.《自动控制原理(第四版)》,科学出版社,2001.9
[3]刘慧英主编•《自动控制原理导教•导学•导教(第四版)》,西北工业大学
出版社,2003.11
[4]袁冬莉编.《自动控制原理(解题题典)》,西北工业大学出版社,2003.3
⑸张静编.《MATLAB在控制系统中的应用》,电子工业出版社,2007
 升级会员
升级会员 