电子科技大学839自动控制原理模拟题一文档格式.doc
《电子科技大学839自动控制原理模拟题一文档格式.doc》由会员分享,可在线阅读,更多相关《电子科技大学839自动控制原理模拟题一文档格式.doc(8页珍藏版)》请在冰点文库上搜索。
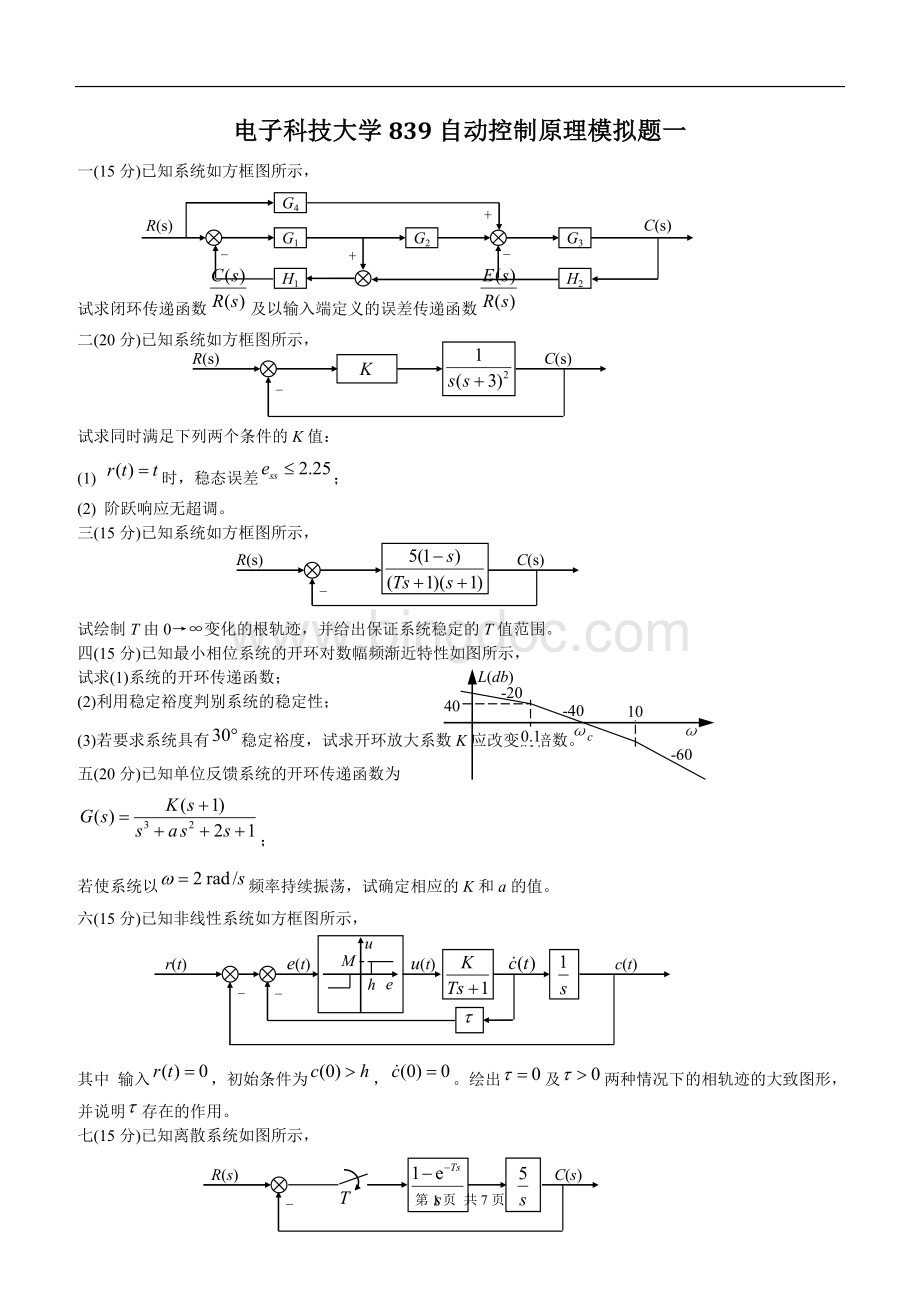
ω
10
0.1
ωc
40
-20
-40
-60
试求
(1)系统的开环传递函数;
(2)利用稳定裕度判别系统的稳定性;
(3)若要求系统具有稳定裕度,试求开环放大系数K应改变的倍数。
五(20分)已知单位反馈系统的开环传递函数为
;
若使系统以频率持续振荡,试确定相应的K和a的值。
六(15分)已知非线性系统如方框图所示,
e
u
h
M
r(t)
c(t)
e(t)
u(t)
其中输入,初始条件为,。
绘出及两种情况下的相轨迹的大致图形,并说明存在的作用。
七(15分)已知离散系统如图所示,
2
T
其中秒,试分析系统的稳定性。
x1
x2
1y
八(15分)已知线性系统结构如图所示,
(1)试按图中所选择的状态变量x1、x2写出系统的状态实现;
(2)判断该实现能否通过选择适当参数a,使其具有能控能观的特性。
九(15分)已知线性系统为
,;
(1)试求时,系统的状态响应和输出响应;
(2)确定系统的传递函数矩阵,这个传递函数能否给出系统的充分描述?
为什么?
十(15分)已知线性系统为
(1)利用状态反馈进行极点配置,使闭环极点配置在处,求状态反馈矩阵K;
(2)画出系统的状态变量图。
电子科技大学839自动控制原理模拟题一答案
一、R
C
G1
G2
G3
G4
-H1
-H2
E
-H1H2
解:
系统信号流图为
计算,;
---------------------------------------------------------------------------------------------------------------------
点评:
正确理解“输入端定义的误差”是计算误差传递函数的要点;
如下所述,本题可以应用方框图简化计算传递函数,解题过程过于烦琐;
还可以应用消元法计算传递函数。
解法二:
方框图简化,
H1H2
E(s)
,
G1H1
G1G2
X(s)
解法三:
消元法,
消去,计算闭环传递函数,
********************************************************************************
二、解:
(1);
(2)据题意,要求闭环极点均为负实数,取满足该条件的最大Km值,有重极点,即
解得,;
答案,同时满足两个条件的K值为。
(a)计算满足稳态误差要求的最小K值,(b)计算临界阻尼(3个极点均为负实数)的最大K值。
(c)应用根轨迹概念,计算满足条件
(2)的K值,
(2)解法二,根轨迹方程;
实轴上根轨迹,;
根轨迹与实轴交点,解,得,;
。
三、解:
系统的特征方程、根轨迹方程依次为
kc
Im
Re
p1
p2
z1
,;
根据根轨迹方程,绘制根轨迹:
实轴上的根轨迹,,;
与实轴的交点,,
与虚轴的交点,;
根轨迹上的箭头表示T值增大的方向。
保证系统稳定的T值范围是,T>
4。
(1)正确列写规范的根轨迹方程;
(2)给出k与T的关系;
(3)完整的解题步骤;
(4)明确根轨迹箭头的意义;
(5)指明系统稳定的T值范围。
四、解:
(1);
(2)由对数幅频渐近特性得到,;
由得到;
因相角裕度为,系统临界稳定(不稳定);
{相角裕度为,系统稳定,稳定裕度很小;
}
(3)据题意有,,;
得到;
开环放大系数K应减小到原值的0.0324倍,即K应减小到0.324。
(1)教材的基本要求;
(2)应用对数幅频渐近特性计算剪切频率;
根据计算结果判
断系统稳定性;
(3)应用相角关系剪切频率;
计算相应的k值。
五、解:
据题意,期望的特征多项式应为;
得到;
答案,满足要求。
(1)持续振荡正表示系统有一对纯虚数极点;
(2)根据特征方程计算所需参数;
(3)可以用劳斯稳定判据求解,
s3
1
令;
s2
a
由辅助方程得到
s1
即;
s0
得到,。
六、解:
系统运动方程:
:
三个区的分区边界(开关线)是两条竖直线。
Ⅰ、Ⅲ区;
相轨迹方程;
无奇点;
等倾线方程;
渐近线方程;
Ⅱ区;
相轨迹为;
Ⅰ区和Ⅲ区的相轨迹必然进入Ⅱ区;
Ⅱ区上半部的相轨迹可能进入Ⅲ区,下半部的相轨迹可能进入Ⅰ区,部分相轨迹终止于e轴的[-h,h]区间上;
系统不存在稳定的极限环。
的相轨迹的大致图形如左图所示
KM
-KM
-h
三个区的分区边界(开关线)是两条斜率为的斜线。
各区相轨迹与时的对应区完全相同(运动方程相同)。
存在的作用是,系统进入下一区的时间提前,将使系统的过度过程时间缩短,如右图所示。
(1)列写各区的(线性)运动方程;
(2)分区分析,根据(斜率)相轨迹方程及奇点、奇线,绘制各区的概略相轨迹;
(3)讨论开关线(分区边界)的作用。
R(z)
C(z)
七、解:
等效离散系统方框图为
其中;
闭环脉冲传递函数为;
因系统的极点在单位圆外,系统不稳定。
(1)带零阶保持器的Z变换;
(2)线性定常离散系统稳定的充分必要条件。
八、解:
(1)根据系统结构图列写微分方程
整理,得到;
系统的状态实现为,;
(2)系统能控性:
无论a取何值,该实现都是不完全能控的;
系统能观测性:
无论a取何值,该实现都是不完全能观测的;
答案,无论a取何值,该实现都是不完全能控且不完全能观测的;
(1)列写各环节的微分方程;
整理,得到系统的状态空间描述;
(2)根据能控性、能观测性计算a值范围最为便捷。
九、解:
,。
(2);
这个传递函数不能给出系统的充分描述。
因为系统不是完全能控且完全能观测的,该传递函数未表明系统的不稳定特征值;
即系统是不稳定的,而该传递函数表示系统稳定。
(1)应用拉氏变换求解最为方便,避免积分运算;
(2)传递函数(矩阵)只反映系统的能控且能观测的部分。
(3)可以状态转移矩阵计算状态响应和输出响应,
(1)设,据方程,计算反馈矩阵。
;
(2)状态变量图,粗线框为状态反馈系数,
3
-4
2
5.61
7.83
9
1/s
r
y
x2
(1)待定系数法求解状态反馈矩阵K最为方便;
(2)状态变量图只是状态方程、输出方程及反馈方程的图形表示。
(3)应用完全能控系统的规范解法,计算烦琐,
解法二,期望特征多项式;
原系统特征多项式;
能控标准形的状态反馈矩阵为;
变换矩阵计算;
;
原系统的状态反馈矩阵为
第8页共7页
 升级会员
升级会员 