DS720高温连续测斜短节Word格式文档下载.docx
《DS720高温连续测斜短节Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《DS720高温连续测斜短节Word格式文档下载.docx(14页珍藏版)》请在冰点文库上搜索。
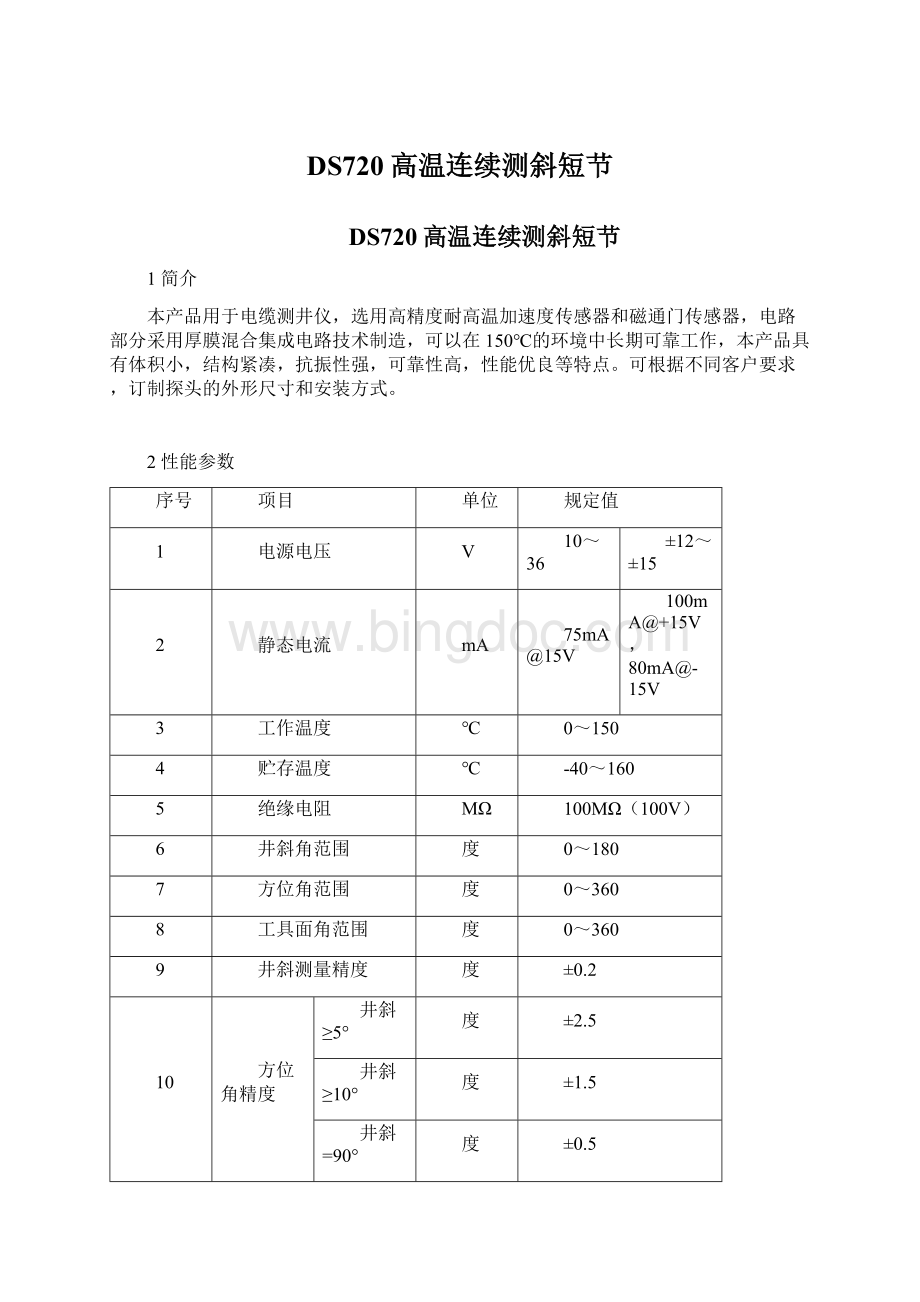
5
绝缘电阻
MΩ
100MΩ(100V)
6
井斜角范围
度
0~180
7
方位角范围
0~360
8
工具面角范围
9
井斜测量精度
0.2
10
方位角精度
井斜≥5°
2.5
井斜≥10°
1.5
井斜=90°
0.5
11
工具面角精度
3外形图
DS720-A外形图DS720-B外形图
DS720-C外形图DS720-D外形图
4电气接口
A型上下9针连接器
B型上15针下9针连接器
C型单9针连接器
D型上15针下9针连接器
5电脑接口
DS720短节的通信接口是UART(TTL/CMOS兼容)串行接口。
在标准配置中,通过脚RX端将数据传送到DS720,通过脚TX将数据从DS720输出。
默认波特率值为9600,有一个停止位,没有奇偶校验位。
为了与外部PC进行通信,DS720的TTL接口必须转换成RS332接口,适用于所有PC的串行接口。
当打开电源时,9600波特率下传送以下信息:
TOKENSUN:
S/NXXXXXXX
Ver:
1.0
在上面的信息中,X代表产品编号。
5.1DS720二进制常量及其设置方法
DS720运行模式由内部二进制常量值控制。
表1二进制常量描述
二进制常量
数值
描述
01
5a
启动自动发送模式
02
传感器分量
04
角度输出
08
上电后自动发送ASCII格式数据
上电后自动发送二进制格式数据
09
波特率锁定,必须为5a时才能更改9600以外的波特率
波特率设定,见表2
23
设置输出数据平均值次数,见表3
35
设置自动模式发送数据包之间的延时
为了改变短节的二进制常量,必须首先发送指令:
0L##
当该指令发送至DS720,将得到以下回复:
enabled
更改二进制常量02=04,发送指令:
0WC02b04##
当收到该指令后,DS720会做出回复:
done
读取二进制常量02,发送指令:
0SC02b##
当收到该指令后,DS720会回复二进制常量02的值。
以上指令不区分大小写。
5.1.1波特率设置
DS720通信波特率默认值是9600,波特率可通过以下步骤进行设置:
根据表2设置二进制常量10;
设置二进制常量09为0x5a;
重新上电
例如,以下指令描述设置波特率至115200
0WC10b07##
0WC09b5a##
当二进制常量09设置为任意值(除了0x5a),短节波特率为9600。
表2波特率设置
波特率
二进制常量10的值
300
0x35
1200
0x33
2400
0x32
4800
0x31
9600
0x30
19200
0x05
38400
0x06
115200
0x07
5.1.2滤波器和平均值设置
在强振动的环境中,DS720通过对输出数据进行数字低通滤波和取平均值使输出数据更加稳定。
DS720内部采用4阶巴特沃斯数字低通滤波器对输出数据进行滤波,其-3dB截止频率可以通过以下指令设置:
读取当前截止频率值
0SF##
设置截止频率频率
0L##
0WFxx##
xx=整数值10、20、30、40、50、60、70、80、90、99
滤波器截止频率频率越低,响应越慢,默认值设置为30Hz。
除数字滤波外,DS720的每个输出数据为前n个数据的平均值,n的值通过设置二进制常量23来改变,不同的n值会影响传感器从0g到1g的响应时间。
以下平均数据个数均在低通滤波截止频率为30Hz时测得。
二进制常量23的值
n
到达稳态值±
0.1%的时间
16
20
32
40
64
14
80
128
28
若要求DS720能在10G峰峰值,频率20~100Hz的振动情况下精确测量角度,需要将滤波器截止频率设置为10Hz,平均值个数n设置为128,指令格式为:
0WC23b80##
5.2自动发送配置
当二进制常量01=0x5a时,DS720为自动发送模式,数据格式通过二进制常量08进行设置。
表3自动发送模式
自动发送模式
二进制常量08值
发送ASCⅡ数据
0x10
发送二进制数据
0x11
可以通过更改二进制常量35来改变自动发送数据包之间的时间间隔,指令格式如下:
0WC35bxx##
其中xx=01、02、03、04、05、06、07、08、09、10,分别代表延时为0.1s~1s。
5.3单数据包发送配置
5.3.1ASCII码通信模式
当发送指令如ASCII字符0SD时,DS720以固定输出回复,当二进制常量02=02时,DS720处于分量数据上传模式,输出数据格式如下:
MX:
+0.20346AX:
-0.07852
MY:
+0.23165AY:
+0.72136
MZ:
+0.29525AZ:
+0.70226
TEMP:
+28.148
以上数据表示X、Y和Z磁通门输出(高斯)和加速度计输出(g)。
当二进制字节02=04,DS720处于角度上传模式,输出数据格式如下:
ROLL:
+35.17825MAGROLL:
+198.24032
PITCH:
+90.14559MAG:
+0.43326
HEAD:
+26.76792GRAV:
+1.00101
+28.026DA:
55.893
ROLL为重力工具面角,PITCH为倾角,HEAD为方位角,MAGROLL为磁性工具面角,MAG为总磁场,GRAV为总重力场,DA为地磁倾角。
5.3.2二进制通信模式
5.3.2.1分量数据上传模式
收到0x80,DS720通过发送二进制传感器分量数据包进行响应(双字节数据,高字节在前):
<
80>
<
0601>
02>
MX>
AX>
MY>
AY>
MZ>
AZ>
T>
V>
CRC>
0604>
指令返回(即主机发送指令0x80的返回值);
分量数据上传同步头,如果数据或者CRC校验码中出现06,DS720会重复发送一次06;
分量数据上传模式;
是双字节(x轴磁传感器数据乘以10000);
是双字节(x轴加速度传感器数据乘以10000);
同上面分量格式;
是双字节(温度传感器数据乘以100);
是双字节(输入电压数据乘以100);
CRC校验位;
同步尾;
5.3.2.2角度数据上传模式
收到0x83,DS720通过发送二进制传感器分量数据包进行响应(双字节数据,高字节在前)。
83>
0602>
03>
TF>
MS>
INC>
BT>
GT>
指令返回(即主机发送指令0x83的返回值);
计算数据上传同步头,如果数据或者CRC校验码中出现06,DS720会重复发送一次06;
计算数据上传模式;
是双字节(重力工具面角计算数据乘以10);
是双字节(磁工具面角计算数据乘以10);
是双字节(倾角计算数据乘以10);
是双字节(总磁场强度计算数据乘以10000);
是双字节(方位角计算数据乘以10);
是双字节(总加速度计算数据乘以10000);
Temp>
Voltage>
0000>
无效填充,备用;
5.4待机功能启动
可通过指令控制DS720待机模式和工作模式,进入待机后,加速度计和磁通门传感器关闭供电,短节低功耗运行,指令格式如下:
进入待机模式:
0PM0##
进入工作模式
0PM1##
待机模式后,DS720只对启动工作模式指令响应;
除发送指令外,重新上电也可以使DS720进入工作模式。
6短节坐标系及角度定义
DS720短节用顶部圆柱形的两个定位销定义坐标系方向。
短节的X,Y和Z轴的方向如图1所示。
若X轴箭头指向北半球的北方,则X轴磁通门输出电压为正;
如果X轴箭头指向下方,则X轴加速度计输出为正。
角度的定义可以参照下图。
以下为DS720计算角度的公式方程,其中
Gx加速度计x轴输出;
Gy加速度计y轴输出;
Gz加速度计y轴输出
Hx磁通门x轴输出;
Hy磁通门y轴输出;
Hz磁通门z轴输出
图2
6.1重力工具面角和磁性工具面角计算
重力工具面角为从Y轴加速度计输出为0,Z轴加速度计输出为正时的位置顺时针转到当前位置时到所转过的角度(从X轴的反方向看)。
重力工具面角θ根据以下公式计算(0≤θ<
2π)
当Gy=0且Gz>
0时,重力工具面角θ=0;
当Gy=0且Gz<
0时,重力工具面角θ=π。
当x轴接近竖直时(倾角<5°
),分量Gy和Gz变小导致θ精度变差。
在这种情况下,磁性工具面角θm常用于确定DS720方位角。
磁性工具面角为从Y轴磁通门输出为0,Z轴磁通门输出为正时的位置顺时针转到当前位置时到所转过的角度(从X轴的反方向看)。
磁性工具面角θm根据以下公式计算(0≤θ<2π)
6.2倾角计算
倾角为X轴于与竖直方向的夹角,当X轴竖直向下时倾角向下等于0,当X轴水平方向倾角为π/2度,当X轴竖直向上时倾角等于π。
倾角ε根据以下公式计算(0≤ε≤π)
其中g=
6.3方位角计算
方位角为从磁北方向(从上看顺时针)到短节X轴在水平面上投影所转过的角度,当DS720的X轴指向磁北时,方位角为0,指向东时,方位角为π/2,方位角
根据以下公式计算(0≤ε≤2π)。
 升级会员
升级会员 