模糊控制器的MATLAB仿真Word文档格式.doc
《模糊控制器的MATLAB仿真Word文档格式.doc》由会员分享,可在线阅读,更多相关《模糊控制器的MATLAB仿真Word文档格式.doc(9页珍藏版)》请在冰点文库上搜索。
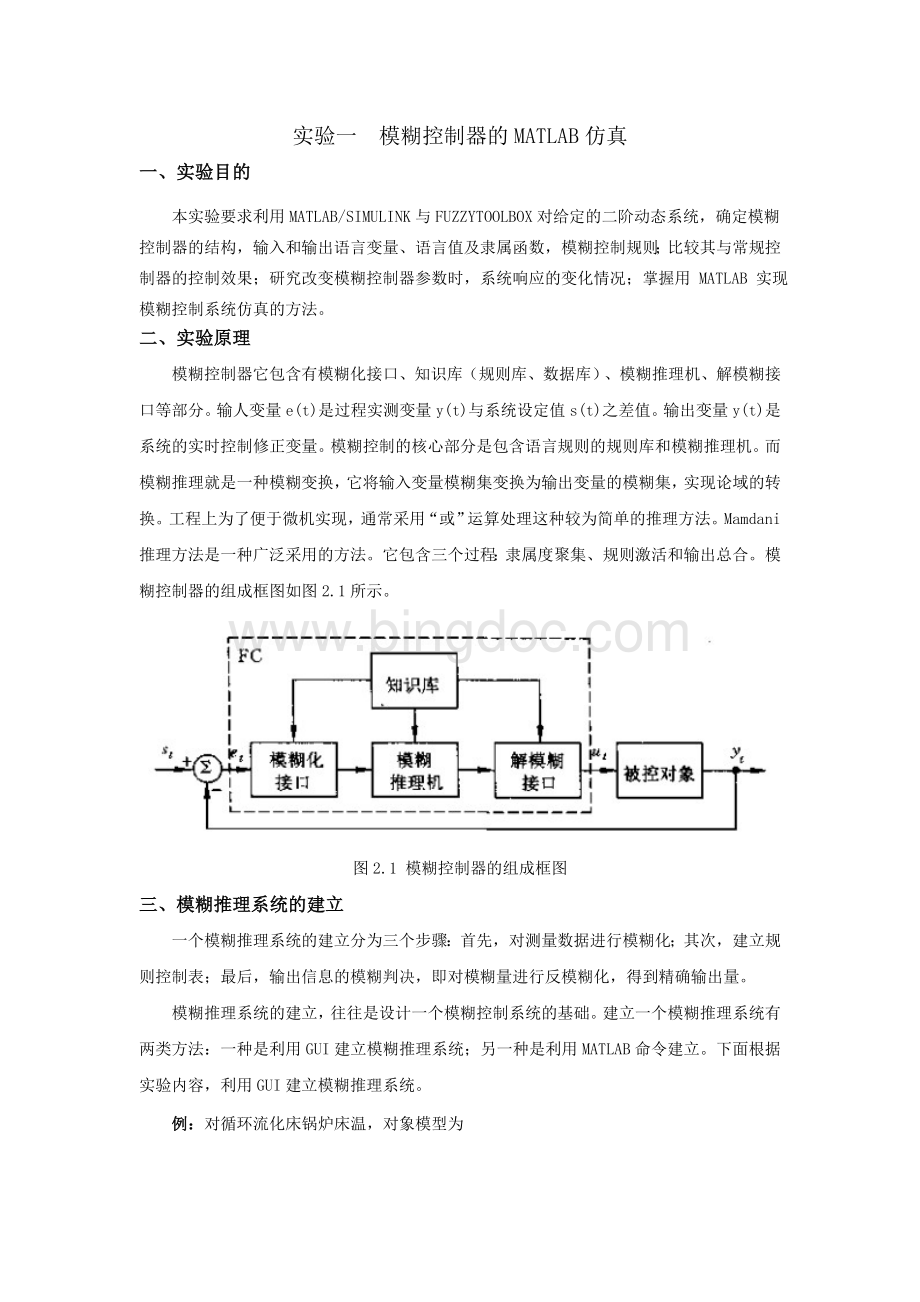
输人变量e(t)是过程实测变量y(t)与系统设定值s(t)之差值。
输出变量y(t)是系统的实时控制修正变量。
模糊控制的核心部分是包含语言规则的规则库和模糊推理机。
而模糊推理就是一种模糊变换,它将输入变量模糊集变换为输出变量的模糊集,实现论域的转换。
工程上为了便于微机实现,通常采用“或”运算处理这种较为简单的推理方法。
Mamdani推理方法是一种广泛采用的方法。
它包含三个过程:
隶属度聚集、规则激活和输出总合。
模糊控制器的组成框图如图2.1所示。
图2.1模糊控制器的组成框图
三、模糊推理系统的建立
一个模糊推理系统的建立分为三个步骤:
首先,对测量数据进行模糊化;
其次,建立规则控制表;
最后,输出信息的模糊判决,即对模糊量进行反模糊化,得到精确输出量。
模糊推理系统的建立,往往是设计一个模糊控制系统的基础。
建立一个模糊推理系统有两类方法:
一种是利用GUI建立模糊推理系统;
另一种是利用MATLAB命令建立。
下面根据实验内容,利用GUI建立模糊推理系统。
例:
对循环流化床锅炉床温,对象模型为
采用simulink图库,实现常规PID和模糊自整定PID。
模糊自整定PID为2输入3输出的模糊控制器。
1、进入FIS编辑器
在MATLAB的命令窗口中键入fuzzy即可打开FIS编辑器,其界面如下图所示。
此时编辑器里面还没有FIS系统,其文件名为Untitled,且被默认为Mandani型系统。
默认的有一个输入,一个输出,还有中间的规则处理器。
在FIS编辑器界面上需要做一下几步工作。
首先,模糊自整定PID为2输入3输出的模糊控制器,因此需要增加一个输入两个输出,进行的操作为:
选择Edit菜单下的AddVariable/Input菜单项。
如下图。
其次,给输入输出变量命名。
单击各个输入和输出框,在CurrentVariable选项区域的Name文本框中修改变量名。
如下图
最后,保存系统。
单击File菜单,选择Export下的ToDisk项。
这里将创建的系统命名为PID_auot.fis
2、进入隶属度函数编辑器
在FIS编辑器中双击输入或输出变量的图框就能进入隶属度函数编辑器。
在隶属度函数编辑器中,需要对各个变量的论域范围、隶属度函数进行编辑。
该模糊控制器是以|e|和|ec|为输入语言变量,Kp、Ki、Kd为输出语言变量,其各语言变量的论域如下:
误差绝对值:
e={0,3,6,10};
误差变化率绝对值:
ec={0,2,4,6};
输出Kp:
Up={0,0.5,1.0,1.5};
输出Ki:
Ui={0,0.002,0.004,0.006};
输出Kd:
Ud={0,3,6,9}。
如图是编辑完成后的隶属度函数编辑器的GUI。
图中显示的为对应边变量e的隶属度函数。
3、进入规则编辑器
双击FIS编辑器图标部分中间的方框即可打开规则编辑器。
(3)语言变量值域的选取:
输入语言变量|e|和|ec|的值域取值“大”(B)、“中”(M)、“小”(s)和“零”(Z)4种;
输出语言变量Kp、Ki、Kd的值域取值为“很大”(VB)、“大”(B)、“中”(M)、“小”(s)4种。
(4)规则的制定:
根据PID参数整定原则及运行经验,可列出输出变量Kp、Ki、Kd的控制规则表。
添加完成后的规则编辑器如下图所示。
4、保存FIS结构
对于建好的FIS结构,利用File菜单下的Export的子菜单ToDisk,将FIS结构保存到磁盘上。
到此,利用FUZZYTOOLS的GUI工具建立了模糊控制器(PID_auot.fis)。
可用GUI工具查看该推理系统,在View菜单中选择Rules命令,可打开规则观测器,查看模糊推理规则。
在View菜单中选择surface命令,可打开曲面观测器,查看模糊推理输出特性曲面。
之后,在Simulink环境下,构建模糊自整定PID和常规PID控制系统。
在MATLAB的命令窗口直接键入“Sinmulink”并回车,即可运行Sinmulink。
运行后显示如下图所示的Simulink模块库浏览器。
然后单击工具条左边建立新模型的快捷方式,如下图
在模型窗口中用户便可以通过选择模块库中的仿真模块,建立自己的仿真模型,并进行动态仿真。
最后构建的模糊自整定PID和常规PID控制仿真系统模型如下图。
其中模糊逻辑控制器的推理系统用模糊逻辑推理GUI工具建立的FIS。
先启动Fuzzy,导入PID_auot.fis,然后将其导出到workspace。
然后运行,运行结果如下图
 升级会员
升级会员 