被动红外入侵探测器的光学系统(阅)文档格式.doc
《被动红外入侵探测器的光学系统(阅)文档格式.doc》由会员分享,可在线阅读,更多相关《被动红外入侵探测器的光学系统(阅)文档格式.doc(8页珍藏版)》请在冰点文库上搜索。
聚乙烯菲涅尔透镜因加工成形方便,价格低廉,被广泛应用于探测距离在30米以内的探测器中,抛物面反射镜构成的光学系统因效率高,聚焦准确,但体积较大。
大尺寸的反射镜组合常用于超过40-60米的探测器中。
为了取长补短,菲涅尔透镜、抛物面反射镜、遮挡片三种类型的聚焦手段经常用于同一个探测器中,相互配合搭建出最佳的光学系统。
111mm
2mm
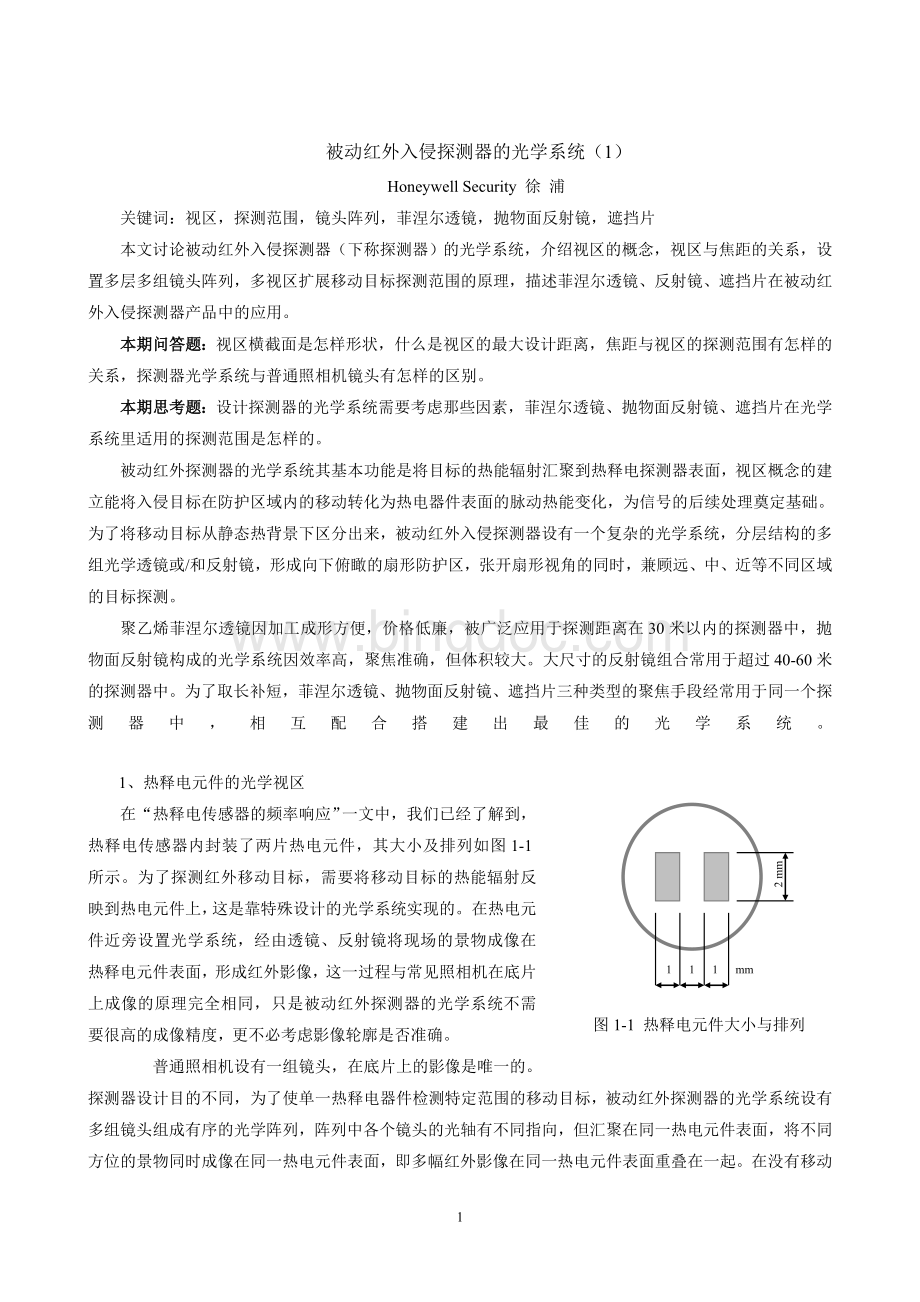
图1-1热释电元件大小与排列
1、热释电元件的光学视区
在“热释电传感器的频率响应”一文中,我们已经了解到,热释电传感器内封装了两片热电元件,其大小及排列如图1-1所示。
为了探测红外移动目标,需要将移动目标的热能辐射反映到热电元件上,这是靠特殊设计的光学系统实现的。
在热电元件近旁设置光学系统,经由透镜、反射镜将现场的景物成像在热释电元件表面,形成红外影像,这一过程与常见照相机在底片上成像的原理完全相同,只是被动红外探测器的光学系统不需要很高的成像精度,更不必考虑影像轮廓是否准确。
普通照相机设有一组镜头,在底片上的影像是唯一的。
探测器设计目的不同,为了使单一热释电器件检测特定范围的移动目标,被动红外探测器的光学系统设有多组镜头组成有序的光学阵列,阵列中各个镜头的光轴有不同指向,但汇聚在同一热电元件表面,将不同方位的景物同时成像在同一热电元件表面,即多幅红外影像在同一热电元件表面重叠在一起。
在没有移动目标的情况下,这些重叠的影像反映了现场背景的热能辐射情况,持续的静态热辐射并不会引起热电输出。
当有移动目标进入防范区域,就会破坏背景形成的热电平衡,产生反映目标移动规律的热电输出。
下面从单一镜头的热能成像开始,介绍热电元件视区的概念,讨论被动红外探测器光学系统视区设计的基本考虑。
1.1、透镜成像
为了方便讨论,这里对光学透镜的焦点、焦距等术语稍做回顾。
图1.1-1是焦距、焦点定义的图示表述,在凸透镜左侧用一束平行光射向镜头,经过凸透镜的折射,在镜头右侧这束平行光汇聚成一点,称为焦点,焦点到镜头光学平面的距离称为焦距。
焦距f
焦点
图1.1-1平行光束的焦点、焦距
面对实际景物,镜头前方的物体都会反射或/和自身辐射(红外)光线,即任何物体都可以看作光线辐射体,物体上的每一个点都可以看成是一个点光源,向各个方向辐射光能。
点光源射向镜头的光线不再是平行光束,因此这些光束不能在镜头焦点处汇聚成点,而是在焦距后方某个位置上汇聚成点。
物体的每一个点发出的光线都以同样的方式在焦距后方汇聚成点,如果在这些汇聚点处设置一个平面,在平面上将形成物体的倒像,如图1.1-2所示,这就是凸透镜的成像原理。
对于被动红外探测器而言,凸透镜是将物体的红外影像投射在热电元件表面。
红外入侵探测器所使用的热电元件没有像素解析能力,并不关心热能影像的形态与细节。
热电元件只是感受到整个元件表面有了一个热能总量的变化。
成像距离d
目标距离D
图1.1平行光束的焦点、焦距
图1.1-2中,目标距离D,成像距离d,焦距f三者之间存在如下的函数关系。
1/D+1/d=1/f (式1.1-1)
由式1.1-1看出,目标离光学透镜越近,成像平面离焦点就越远,当目标远离透镜,光束趋向平行,成像平面越接近焦点。
1.2、热电元件的视区
如果用图1-1所示的热电元件充当透镜成像面,两个热电元件表面就会呈现现场景物的倒像。
由于每一个热电元件的大小只有2x1mm,经过透镜能够投射到元件矩形范围内的现场景物就局限在一个漏斗型的空间里,换言之,热电元件只能“看”到这个漏斗形空间内的热能景物,我们称这个漏斗形热敏感空间为热电元件的视区。
双元件热电器件在墙装探测器中普遍采用,配用单一凸透镜后会形成两个规则排列的热敏感视区,如图1.2-1所示。
图1.2-1单一透镜形成的两个红外视区
两片热释电元件
凸透镜
一个视区
漏斗形视区任一横断面其高宽比均为2:
1,漏斗张角(视角)的大小取决于镜头焦距的设计,焦距越小,漏斗的视角越大。
一般而言,希望防范较远区域的移动目标应采纳小视角视区,即采用较长焦距的镜头,反之亦然。
1.3、目标穿越视区与相应的热电信号
我们知道,为了抵消热电元件参数漂移造成的不良影响,热释电传感器内的两片热电元件做了反极性连接,当目标穿越两个视区时,热电元件会输出一正一反的两个热电信号,图1.3-1给出了目标穿越视区时相应产生的热电信号。
图中移动目标从左向右穿越第一个视区,之后进入两个视区的间隔,再进入另一个视区,离开。
由此形成一对正负交错的热电信号。
移动目标
热电元件
透镜
热电输出
图1.3-1移动目标穿越视区产生相应热电信号
1.4、视区数量扩充
单一镜头所能形成的视区只有两个,防范区域也限定在视区作用的范围内,为了获得更大的防范区域,需要增加互不重叠的视区数目,在被动红外探测器中扩充视区数量的普遍做法是设置多个镜头,镜头法线汇聚热电元件中心,法线向外辐射,以形成等间距视区分布,如图1.4-1所示,使用了三片镜头弧形排列,于是形成了六个视区,扇形分布,防范区域得以扩充。
需要关注的是,三个镜头在热电元件表面形成了三幅不同的影像,三幅影像重叠在一起,是否会影响热电元件的正常工作。
在没有移动目标进入视区的情况下,热电元件表面的三幅影像均为现场背景的热辐射成像,这样的静态背景所产生热辐射为持续不变的能量场,在“热释电传感器的频率响应”一文中已有表述,对热电器件持续不变的热辐射会使热电器件处于热平衡状态,不会有热电信号输出。
当有移动目标进入任何一个视区,持续的背景能量辐射受到扰动,热电器件接收到的热能发生变化,原有的热平衡状态被打破,热电元件产生热电信号输出。
图1.4-1三镜头六视区示意图
为了获得一个立体的防范区域,一般的被动红外探测器都会设计多组镜头构成的阵列,在水平方向,垂直方向形成多层扇形分布的数十个视区,张成一个向下俯视的扇形防范区域。
2、区的灵敏度及有效探测范围
视区的形状是放射状漏斗型,移动目标处在视区不同位置对热电元件的热能辐射变化很大,不同位置会产生不同探测效果,目标离探测器太远,在热电表面成像面积太小,热电元件不能产生足够强度的电信号,离镜头太近,目标体积超越视区外廓,以至于同时占据两个视区,也会使得热电特征模糊,不能获得有效的热电信号。
了解这些特点,在工程设计时对探头的安放高度、角度会有所帮助。
2.1、视区灵敏度特征
移动目标进入视区范围,就被成像在热释电元件的表面,当目标所成影像正好充满一个热电元件的整个表面时,目标面向镜头的辐射能覆盖了整个热电器件,热电元件有较大的热电信号输出。
对于目标影像完全拟合热电元件整个矩形区域,此时目标所处视区位置到镜头距离称为最大设计距离,与此相应的热电信号幅度定为一个灵敏度单位,探测器生产过程总是调整传感器参数使之满足最大设计距离的要求。
图2.1-1给出了最大设计距离示意。
1.0
0.5
灵敏度
探测范围
最大设计距离
图2.1-1视区灵敏度范围
在图2.1-1中,当目标背向传感器方向移动,目标在热电元件表面成像范围逐步减小,传感器的探测灵敏度会跟随降低,灵敏度的下降按距离倍数平方的倒数规律变化,如果最大设计距离为40米,则目标在60米处的灵敏度下降到0.44(=1/(60/40)2)。
如果目标面向传感器方向移动,开始灵敏度会有所提高,也满足幂指数规律,其后灵敏度不再增加,热电器件处于饱和状态。
这是因为目标的影像已超过热电元件的尺寸,而热电元件表面并没能因此获得更多的热辐射能量。
实际应用中灵敏度的变化情况会复杂的多,首先,人体各个部位的热辐射状况因着装不同并非均匀一致,充满热电元件的影像未必代表真实的最大设计距离。
其次,背景热辐射与目标之间的红外温差有很大的变化范围,也同样制约了探测器光学系统设计的定量分析。
考虑到各种影响因素,光学系统灵敏度设计会很复杂,但大体的设计思想是把握使得最大设计距离与期望的最远探测距离之比定为2/3左右,此时最远探测距离处灵敏度将下降到0.5-04。
由此比例可以推算出最大设计距离,根据最大设计距离计算出光学系统的焦距。
为了保证热电器件有足够的信号输出,要求最大设计距离处的最小信号输出幅度不低于峰-峰值0.5mV,由此确定光学系统透镜的光通亮,即镜头的面积,适用的光通亮可以通过实验的方法加以确定。
图2.2-1视区的水平布置
2.2、视区的水平布置
在任何一个红外探测器的说明书里都可以看到探测范围图,图2.2-1就是某探测器水平探测范围图,可以看到这时一个90度的扇形区域,条状阴影代表的是热电器件的视区,图中可以区分出22个视区,进一步可以算出每个视区末端的宽度约0.5米,视区到视区的间隔约0.5米。
扇形区域半径9米处,视区的这两个间隔会缩小到0.3米以下。
探测半径9米到15米的范围是这22个防区的最佳探测范围,首先,0.3-0.5米的间隔可以包容作为移动目标的儿童至成人,当移动目标在视区之间穿行时,可以使相应的热电信号有完整的起伏变化。
第二,目标穿越速度在0.3-2公里/小时范围内可以满足热电元件频率响应要求。
2.3、视区的垂直布置
为了探测到整个扇形防护区内的移动目标,探头需要设置三到四层透镜组,对于图2.2-1的探头,9-15米为它的远距离探测范围,由排列在最上一层的透镜组承担,共计11个透镜形成22个视区。
图2.3-1是探测范围的侧视图,可以更清楚地看出分层透镜防护区域的分工。
红外探测器安装高度离地2.3米左右,探测器设有四层透镜组,各层透镜以不同角度向下俯视,从远倒近覆盖不同的防范区域,远距离、中距离、近距离及下望区,各区之间相互衔接,不留探测盲区。
图2.3-1视区的垂直布置
值得注意的是中距离、近距离视区的光学设计会有一些特殊考虑,甚至被探测器制造业认为是最难处理的部分。
随着俯视角度增加,视区与目标的夹角变窄,目标离镜头距离变短,使得热电元件不能区分人与宠物的热能辐射。
图2.3-2中,中距离视区宠物与人的褪部一样也能充满整个视区,有可能造成不必要的误报。
要解决中、近距离探测器防宠物的问题,就希望中、近距离透镜组的焦距要短一些,视区的张角得以扩张,增加了背景在画面中所占比例,使宠物在热电元件表面的成像面积变小,降低误报的可能性。
(未完待续)
图2.3-2近距离宠物误报的原因
8
 升级会员
升级会员 