三相异步电机矢量控制matlab仿真Word文档格式.docx
《三相异步电机矢量控制matlab仿真Word文档格式.docx》由会员分享,可在线阅读,更多相关《三相异步电机矢量控制matlab仿真Word文档格式.docx(22页珍藏版)》请在冰点文库上搜索。
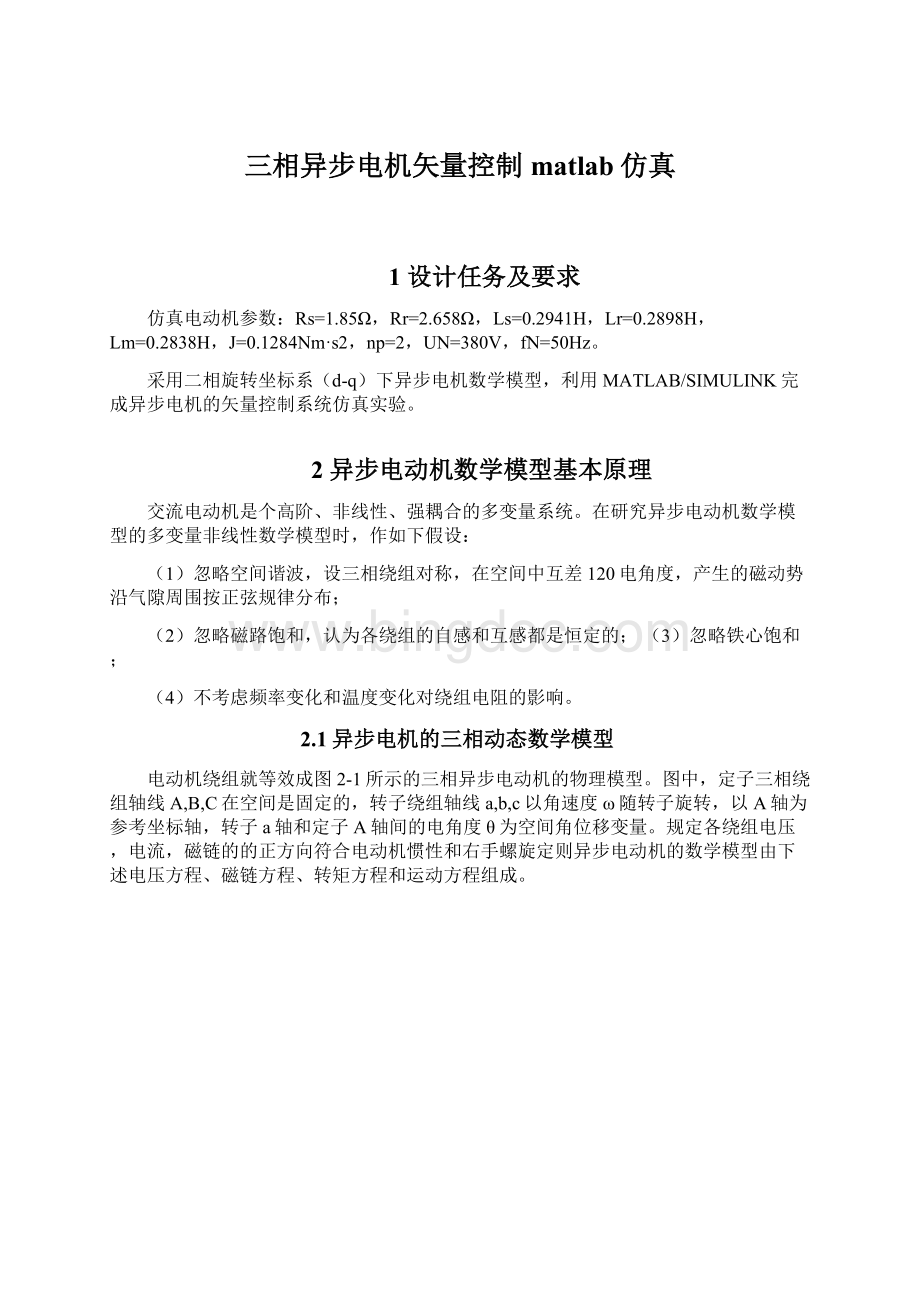
图2-1三相异步电动机的物理模型
(1)磁链方程
每个绕组的磁链是它本身的自感磁链和其他绕组对它的互感磁链之和,因此,六个绕组的磁链可表达为:
式中iA,iB,iC,ia,ib,ic---定子和转子相电流的瞬间值;
ψA,ψB,ψC,ψa,ψb,ψc---各相绕组的全磁链。
L---6×
6电感矩阵,其中对角线元素LAA、LBB、LCC、Laa、Lbb、Lcc是各有关绕组的自感,其余各项这是绕组间的互感
。
实际上,与电机绕组交链的磁通只有两类:
一类是穿要过气隙的相间互感磁通;
另一类是只与一相绕组交链而不穿过气隙的漏磁通,前者是主要的。
定子各相漏磁通所对应的电感称为定子漏感,由于绕组的对称性,各相漏感值均相等;
同样,转子各相漏磁通则对应于转子漏感。
与定子一相绕组交链的最大互感磁通对应于定子互感Lms,与转子绕组交链的最大磁通对应于转子互感Lmr。
由于折算后定、转子绕组匝数相等,且各绕组间互感磁通都通过气隙,磁阻相同,故可认Lms
=
Lmr。
对于每一相绕组来说,它所交链的磁通是互感磁通和漏感磁通之和,因此,定子各相自感为
LAA=LBB=LCC=Lms+Lls
(2-2)
转子各相自感:
Laa=Lbb=Lcc=Lmr+Llr
(2-3)
两相绕组之间只有互感。
互感有分为两类:
①定子三相绕组彼此之间和转子三相彼此之间位置都是固定的,故互感为常值;
②定子任一相之间的位置是变化的,互感是角位移θ的函数。
现在先讨论第一类,三相绕组轴线彼此在空间的相位差是+_120度,在假定气隙磁通为正玄分布的条件下,互感值应为
于是,定子各绕组之间的互感和转子各绕组之间的自感
至于第二类与电机交链的磁通,即定、转子绕组间的互感,由于相互间位置的变化,可分别表示为
当定、转子两相绕组轴线一致时,两者之间的互感值达到最大值,就是每相的最大互感Lms。
磁链方程可以写成分块矩阵的形式如下:
式中:
Lrs和Lsr两个矩阵互为转置,且均与转子位置角θ有关,它们的元素都是变参数,这是系统非线性的一个根源。
为了把变参数矩阵转换成常参数矩阵须利用坐标变换。
(2)电压方程
三相定子绕组的电压平衡方程组
三相转子绕组折算到定子侧的电压方程
式中uA,uB,uC,ua,ub,uc---定子和转子相电压的瞬时值;
Rs,Rr---定子和转子绕组电阻。
将电压方程写成矩阵形式
或者写为
将磁链方程代入电压方程,即得展开后的电压方程
其中,Ldi/dt项属于电磁感应电动势中的脉变电动势,dL/dθ(wi)项属于电磁感应电动势中与转速w成正比的旋转电动势。
(3)转矩方程
用三相电流和转角表示的转矩方程
上述公式是在线性磁路,磁动势在空间按正玄分部的假定条件下得出来的,但对定转子电流对时间的波形未作任何假定,式中的电流i都是实际瞬时值。
因此上述电磁转矩公式完全适用于变压变频器供电的含有电流谐波的三相异步电动机调速系统。
(4)运动方程
若忽略电力拖动系统传动机构中的粘性摩擦和扭转弹性,则系统的运动方程式为:
式中J---机组的转动惯量;
TL---包括摩擦阻转矩的负载转矩。
转角方程为
2.2异步电机的坐标变换
2.2.1三相-两相变换
在三相静止绕组A、B、C和两相静止绕组α、β之间的变换,称作三相静止坐标系和两相静止坐标系间的变换,简称3/2变换。
图2-2中绘出了A、B、C和α、β两个坐标系,为方便起见,取A轴和α轴重合。
当三相总磁动势与两相总磁动势相等时,两套绕组瞬时磁动势在α、β轴上的投影都应相等:
图2-2三相、两相静止坐标系与磁通势空间矢量
C3/2是三相坐标系变换到两相坐标系的电流变换阵,根据变换前后产生相同的磁动势的原则和变换前后功率不变的原则,可以得到:
如果从两相坐标系变换到三相坐标系,简称2/3变换:
考虑到实际异步电机的三相绕组为不带中线的对称绕组,没有零轴电流,并且满足iA+iB+iC=0,于是三相坐标系与两相坐标系之间的电流变换可进一步简化为:
2.2.2静止两相-旋转正交变换
图2-3两相静止和旋转坐标系与磁动势空间关系
在图2-3中,两相交流电流iα和iβ和两个直流电流id和iq,产生同样的以同步转速ω1旋转的合成磁动势Fs。
由图2-3可见,iα和iβ,id和iq之间有下列关系:
两相旋转坐标系变换到两相静止坐标系的变换矩阵为:
两相静止坐标系到两相旋转坐标系的变换矩阵是:
3
异步电动机按转子磁链定向的矢量控制系统
3.1
按转子磁链定向矢量控制的基本思想
通过坐标变换,在按转子磁链定向同步旋转正交坐标系中,得到等效的直流电动机模型。
仿照直流电动机的控制方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量反变换得到三相坐标系的对应量,以实施控制。
3.2以ω-is-ψr为状态变量的状态方程
3.2.1
dq坐标系中的状态方程
选取状态变量:
输入变量:
输出变量:
电压方程:
转矩方程:
运动方程:
转子电磁时间常数:
电动机励磁系数:
状态方程:
输出方程:
3.2.2αβ坐标系中的状态方程
旋转正交dq坐标系的一个特例是与转子磁链旋转矢量同步旋转的坐标系。
令d轴与转子磁链矢量重合,称作按转子磁链定向的同步旋转正交坐标系,简称αβ坐标系。
将静止正交坐标系中的转子磁链旋转矢量写成复数形式
图3-1静止正交坐标系与按转子磁链定向的同步旋转正交坐标系
由于m轴与转子磁链矢量重合:
为了保证m轴与转子磁链矢量始终重合,还必须使
将式(3-12)和式(3-13)代入式(3-9),得到αβ坐标系中的状态方程:
由式(3-9)第三行得:
导出αβ坐标系的旋转角速度:
αβ坐标系中的电磁转矩表达式:
通过按转子磁链定向,将定子电流分解为励磁分量和转矩分量,转子磁链仅由定子电流励磁分量产生,电磁转矩正比于转子磁链和定子电流转矩分量的乘积,实现了定子电流两个分量的解耦。
在按转子磁链定向同步旋转正交坐标系中的异步电动机数学模型与直流电动机动态模型相当。
3.3
以w-is-Φr
为状态变量的αβ坐标系上的异步电动机动态结构图
根据αβ坐标系中的状态方程,可以画出αβ坐标系中的异步电动机动态结构图如下:
图3-2按转子磁链定向的异步电动机动态结构图
3.4
转速闭环后的矢量控制原理框图
按转子磁链定向仅仅实现了定子电流两个分量的解耦,电流的微分方程中仍存在非线性和交叉耦合。
采用电流闭环控制,可有效抑制这一现象,使实际电流快速跟随给定值。
在按转子磁链定向坐标系中计算定子电流励磁分量和转矩分量给定值,经过反旋转变换2r/2s和2/3变换得到三相电流。
通过电流闭环的跟随控制,输出异步电动机所需的三相定子电流。
图3-3矢量控制系统原理框图
3.5转速闭环后的矢量控制系统结构图
转子磁链环节为稳定的惯性环节,可以采用闭环控制,也可以采用开环控制方式;
而转速通道存在积分环节,必须加转速外环使之稳定
常用的电流闭环控制有两种方法:
第一种是将定子电流励磁分量和转矩分量给定值施行2/3变换,得到三相电流给定值,采用电流滞环控制型PWM变频器,在三相定子坐标系中完成电流闭环控制。
第二种是将检测到的三相电流施行3/2变换和旋转变换,得到αβ坐标系中的电流反馈值,采用PI调节软件构成电流闭环控制,电流调节器的输出为αβ坐标系中定子电压给定值。
反旋转变换得到静止两相坐标系的定子电压给定值,再经SVPWM控制逆变器输出三相电压。
本次设计利用的是第二种方法。
矢量控制系统的结构图如下所示:
图3-4定子电流励磁分量和转矩分量闭环控制的矢量控制系统结构图
其中,ASR是转速调节器,AΦR是转子磁链调节器,ACMR是定子电流励
磁分量调节器,ACTR是定子电流转矩分量调节器。
异步电动机具有非线性、强耦合、多变量的性质,要获得良好的调速性能,必须从其动态模型出发,分析异步电动机的转矩和磁链控制规律,研究高性能异步电动机的调速方案。
矢量控制就是基于动态模型的高性能的交流电动机调速系统的控制方案之一。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
4
异步电动机矢量控制系统仿真
4.1
仿真模型的参数计算
已知异步电动机的额定数据:
根据已知条件计算如下:
根据式
可得:
转差率
同步转速
可得转差角频率
又根据转差角频率的公式
则可得:
4.2
矢量控制系统的仿真模型
根据mt坐标系上的异步电动机动态结构图(3-2)和矢量控制系统结构图(3-4),利用MATLAB搭建仿真模型如下:
图4-1
矢量控制系统仿真模型
由图中可知ASR为转速调节器,APsirR为转子磁链调节器,ACMR为定子电流励磁分量调节器,ACTR为定子电流转矩分量调节器,对转子磁链和转速而言,均表现为双闭环控制的系统结构,内环为电流恒定,外环为转子磁链或转速环。
其中系统中的K/P模块是计算转子磁链幅值和角度的,其内部结构图如图4-4所示。
其中mt坐标系下的AC
Motor的仿真模型如下:
图4-2
mt坐标系下异步电动机的仿真模型
转速、转子磁链和两个电流调节器均采用带有积分和输出限幅的PI调节器。
图4-3
PI调节器的模型
本次仿真设计中的调节器都是采用PI调节器,其传递函数为;
Ki
—
电流调节器的比例系数;
Ti—
电流调节器的超前时间常数。
同时其传递函数也可写为:
系统中的K/P模块用来计算转子磁链幅值和角度
图4-4转子磁链和角度计算结构图
在此次设计中,由于电动机模型是根据两相静止αβ坐标系下的数学模型建立,在仿真设计中加入了静止两相——旋转正交变换(2s/2r变换)和旋转——静止两相正交变换(2r/2s变换),其MATLAB仿真结构图分别如图4-5和图4-6所示。
图4-5
2s/2r变换结构图
图4-62r/2s变换结构图
4.3仿真结果分析
4.3.1
mt坐标系中的电流曲线
电机定子侧的电流(Isa&
Isb)仿真结果如图4-7所示。
系统在t=3s时突加负载。
由仿真结果可知:
空载起动时,定子电流基本稳定不变,成正弦变化。
在t=3s突加负载后,电流仍成正弦变化,幅值变大,但基本保持稳定。
图4-7电机定子侧的电流(Isa&
Isb)
电机的转子速度及转子磁链仿真结果
电机的转子速度Wr和转子磁链Psir仿真结果分别如图5-4和5-5所示。
可见,电机起动后,转速成线性上升,当上升到给定值时,转速调节器ASR的输出由于积分作用还维持在幅值。
转速超调后使得ASR退饱和从而稳定在给定值。
突加负载后,转速下降,但由于采用的是PI调节器,它具有消除静差的作用,所以转速很快上升继续保持在给定值。
转子磁链Psir建立后,几乎为恒值,在突加负载后,磁链有一个小幅度的上升,但在电流环的PI调节作用下,磁链Psir很快恢复到给定值,并在此状态稳定运行。
励磁分量与转矩分量
5.
总结与体会
参考文献
[1]陈伯时.电力拖动自动控制系统(第4版).机械工业出版社.2004.
[2]李德华.电力拖动控制系统(运动控制系统).电子工业出版社.2006
[3]裴润,宋申明.自动控制原理(上册).哈尔滨工业大学出版社.2006.
[4]黄忠霖.自动控制原理的MATLAB实现.国防工业出版社.2007.
[5]冯垛生,曾岳南.无速度传感器矢量控制原理与实践.2006.
[6]彭晓源.系统仿真技术.北京:
北京航空航天大学出版社,2006
 升级会员
升级会员 