蓝光一体机调试手册簿.docx
《蓝光一体机调试手册簿.docx》由会员分享,可在线阅读,更多相关《蓝光一体机调试手册簿.docx(23页珍藏版)》请在冰点文库上搜索。
蓝光一体机调试手册簿
蓝光一体机调试手册
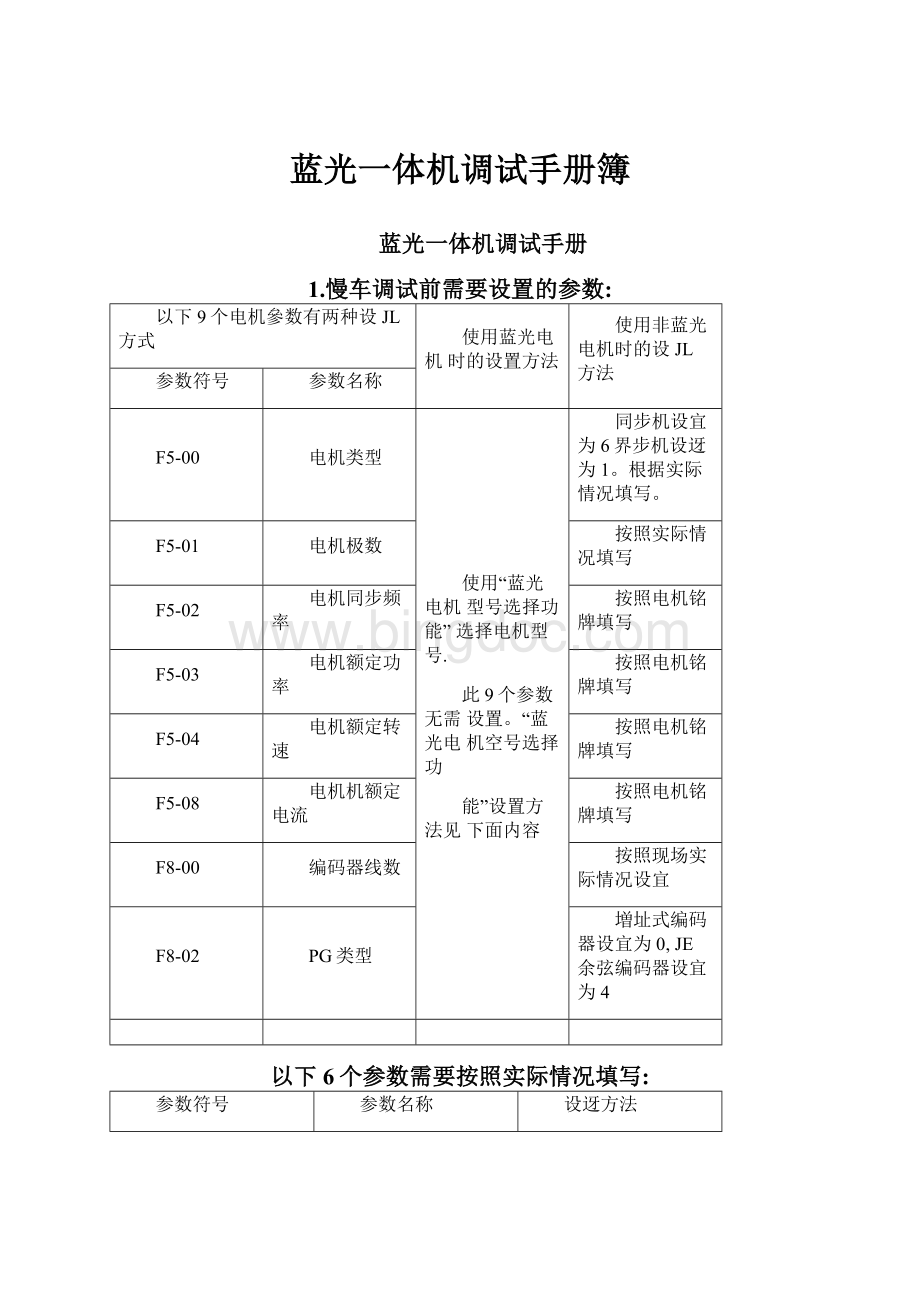
1.慢车调试前需要设置的参数:
以下9个电机參数有两种设JL方式
使用蓝光电机时的设置方法
使用非蓝光电机时的设JL方法
参数符号
参数名称
F5-00
电机类型
使用“蓝光电机型号选择功能”选择电机型号.
此9个参数无需设置。
“蓝光电机空号选择功
能”设置方法见下面内容
同步机设宜为6界步机设迓为1。
根据实际情况填写。
F5-01
电机极数
按照实际情况填写
F5-02
电机同步频率
按照电机铭牌填写
F5-03
电机额定功率
按照电机铭牌填写
F5-04
电机额定转速
按照电机铭牌填写
F5-08
电机机额定电流
按照电机铭牌填写
F8-00
编码器线数
按照现场实际情况设宜
F8-02
PG类型
増址式编码器设宜为0,JE余弦编码器设宜为4
以下6个参数需要按照实际情况填写:
参数符号
参数名称
设迓方法
F1-00
电梯额定速度
按照现场实际情况填写。
a
F1-01
折算转速
电梯额定速度时对应的电机转速
F5-09
空载电流
界步机专用参数,同步机无需设宜。
一般设为额定电流的25%到40%。
F5-10
滑差
)
界步机专用参数,同步机无需设宜,按照实际设迓即可。
异步电机滑差计算公式:
滑差二额定频率-(额定转速•极对数灿)如:
电机额频率为50HZ.额定转速为1440rmp,4级电机。
则此电机的滑差为50-(1440*^60)=2HZ・
F&03
运行方向选择
按照现场实际的电机安装方向进行选择,面对曳引轮逆时针旋转.轿箱下行,设宜为0。
反之设置为
F9-11
称重补偿使能
使用増虽式编码器必须设迓为1.1387編码器使用无称重模式时设宜为0.
使用bl系列一体机时,如果所选用电机也是蓝光所产,只需输入该电机的型号以及编码器信息,即可自动完成电机相关参数的设置。
输入方法1(现在应用在0P-V5上的版本):
从主菜单中进入如图所示的“蓝光电机输入”界而,按动[左]键或[右]键,光标可向左或右循环移动,按[上]键或[下]键可修改光标所在位的内容,整个可输入内容由三部分组成,用分隔开。
首部分为电机型号(分4位分别输入),中间部分为编码器线数信息,最后部分为PG类型。
具体如下图所示,
输入完整的电机及编码器信息后,按确定键,手持操作器将自动完成当前电机型号相应
电机参数的写入过程,请等待,待界而提示成功后退岀该界面,进行保存参数操作。
如果输入不合理的电机型号,或是输入的信息不完整(例如只输入电机型号未输入编码器线数),界面将提示''无效型号”,请确认型号准确且编码器信息无误,再进行操作。
如果界面提示失败,须重新进行操作。
2.电机角度自学习
现场有于•持操作器的悄况下:
如没有安装钢丝绳,曳引轮可以完全空救,建议使用内容中的“不带钢丝绳角度自学习二如已经安装J'钢丝绳,曳引轮上已经有了负载.建议使用内容中的“带钢丝绳角度自学习二
现场使用的是蓝光电机配合BL系列一体化系统.在没有于持操作器的情况下:
可以使用内容中的方式。
3种角度自学习方式可以达到同样的效果•根据现场情况选择其中一种进行即可。
2.1不带钢丝绳角度自学习步骤:
只有同步机需要进行角度自学习。
使用旋转自学习时,需要将PG类型F8-02设过正确启学习方式选择FC-13设貝为S
1.<
2•必须使同步电机(曳引机)处于空载状态(不得悬挂钢丝绳入
3•将控制器运行接触器输出Y9(J4-7)与COM3(J4-6)短接,使运行接触器吸合:
4•将控制器抱闸输出Y6(J4-10)与COM3(J4-6)短接,使抱闸接触器吸合.打开抱闸:
通过操作器按以下操作进行电机初始角度自学习:
成功或U示故肾码
图电机初始角度(位置〉自学习操作示意图
对于增址式編码器,按下“确定惟”后开始电机初始角度自学习。
电机开始先晃动、或正反转小幅度运行.然后正向(面对曳引轮.电机逆时针旋转为正向)加速到一定的速度.匀速运行约20秒停止:
接着再次正向加速到一定的速度•匀速运行约20秒停止:
接着再第三次加速到一定的速度,匀速运行约20秒.停止运行并显示成功。
整个自学习过程约持续80秒。
对于正余弦编码器,按下确定键后开始电机角度旋转自学习,首先电机将立即旋转到一个固定位宜,然后正向(以面向驱动轴方向,电机逆时针旋转)匀速旋转,旋转的速度与时间视电机的极数和初始位宜而定.至篡旋转一圈后电机停止.并将再次旋转到某一位置停驻约2秒,停止运行显示成功。
整个自学习过程持续时间在20秒以内。
増虽式编码器不帶钢丝绳角度自学习故障列表:
故障代码
名称及内容
故障原因
解决方法
RF1
旋转自学习错误
电机带载
电机相序不正确
編码器损坏或接线错误
检査电机是否空载检査电机相序是否正确检査编码器及其接线
RF2
自学习数据错误
电机参数错误
1
編码器损坏.接线错误及受强下扰
检査电机参数
检查编码器及其接线处理干扰
RF3
自学习过程中z相脉冲缺失
編码器损坏或接线错误
检査编码器及其接线
RF4
自学习结杲异常
电机参数输入不正确編码器界常电机未空載
速度环PI设迓过大
检査电机参数输入
检査编码器及其接线
检査电机是否空载
适当减小速度环PI
RF5
自学习过程中UVW重复输入
編码器的UVW有短路或者断线
检査编码器接线
RF6
电机没有能够正常旋转
电机带载
电机相序不正确
检査电机是否空载检査电机相序是否正确
其他
请检査驱动器是否有故障
在有驱动故障的情况•不能进行自学习,直接报出当前故障码
请检査是否有驱动故障
正余弦编码器不带钢丝绳角度自学习故障:
故障代码
名称及内容
故障原因
解决方法
RF232
电机未旋转
编码器连接有误
电机参数输入有误
负载侧开路
电机带载或抱闸未打开
正确连接编码器信号
正确输入电机参数
确保电机与一体机连接无误
确保电机脱开负载且抱闸已打开
RF233
A
电机旋转方向错误
电机相序与编码器相序不对应
调整电机相序
或者调整編码器A・.A+或B+
RF234
编码器Z脉冲信号有误
未检测到Z脉冲负载侧连接有误
检査編码器Z脉冲信号接线
确保电机空载
确保电机与一体机连接无误
图电机角度静止自学习操作示意图
2.2BL系列一体机配蓝光同步电机现场参数初始化
使用BL系列一体化配蓝光同步电机时,只需要在出厂前在BL系列一体机内输入蓝光对应电机型号,无需每台一体机都与电机在厂内进行对应匹配的角度自学习。
可以到现场后通过下述的步骤,完成一体化和电机间的参数初始化,进而获得电机
初始角,实现慢车运行。
说明:
一体机出厂前必须在厂内预先设宜好与其配套的电机的基木参数(F5组)和PG卡参数(F8组人同时将电机自学习方式设迓为静止自学习。
车试运行:
1•检修运行前确认爭项
1)安全回路、门锁回路工作正常.切记不可将门联锁短接。
2)上电后控制柜中KJT急停接触器、KMB门锁接触器、KMC电源接傩湍吸合,控制器上电显示正
常并检查参数设匱是否正确,电梯匸作状态项显示“检修INSPN
3)将电机抱闸与控制柜连线接好。
2•检修运行
出检修慢上(慢下)时,若实际轿厢为下行(上行人可通过设SF6-03进行修正,为0逆时针下行,为1逆时针上行.可根据现场实际情况进行设宜。
十机房检修运行条件满足后,按控制柜的慢上(下)按钮•电梯应以设定的检修速度上(下)运行。
5.井道自学习步骤:
对干有于•持操作器的现场.可以按照草节中的内容进行井道自学习。
对于没有于•持操作湍的现场,可以按照萃节中的内容进行井道自学习。
两种井道自学习可以达到同样的效果•根据现场悄况进行其中一种即可。
井道自学习前需要设置的参数,
参数符
号
参数名称
设迓方法
F0-00
总楼层
按照现场实际情况设宜,有多少门区开关,就设宜实少层。
F9-03
超差范则设定
一般同步机设置为5.异步机设宜为20。
F1-16
S
零速阈值
一般悄况同步机设宜为1•异步机设置为5。
5.1使用手持操作器的井道自学习
井道自学习运行是指电梯以自学习速度运行并测虽各楼层的位置及井道中各个开关的位宜。
由于楼层位宜是电梯正常起、制动运行的基础及楼层显示的依据。
因此•电梯快午运行之前.必须首先进行井道自学习运行。
井道自学习前必须进行全程检修试运行.从下限位检修运行到上限位正常.
井道自学习步骤如下:
1.确认电梯符合安全运行条件:
2.井道内备开关安装及接线正确无误•随行电缆及外召电缆连接正确无误并且进行外召及显示地址设
S:
3.:
4.使电梯进入检修状态,慢午向下行至下限位有效:
5•通过液晶显示屛进入自学习菜按菜爪提示操作:
如图所示。
图井道自学习操作示意图
6•自学习结果可在监视菜单井道刻度参数U00-U69中观察到,其数据单位为米(m),请在自学习后观察各开关的刻度是否正确。
7•在自学习过程中.若控制系统发现有界常现彖,将会中途停止自学习•并给出相应的故障号.请查看相关故障列表,找出故障原因,进行相应处理后,再重新进行上述井道自学习。
注意:
在自学习过程停止时,只有液晶显示“成功”时,自学习才真正成功完成。
在确定井道自学习准确无误后,可进行快车试运行。
步骤如下:
1・
2•将电梯宜于有司机状态。
3•通过操作器的选层控制DO参数,可以选定电梯运行楼层(详见说明书第四萃调试参数人可分别进行讯层、双层.多层及全程的试运行。
可以通过D1参数界面进行开关门抬令输入,进行开关门操作。
4.确认电梯在上述区间运行时均能正常起动,加速、减速至零速后平层停车。
若运行异常,请认真核査参数设宜是否有误。
5•将电梯宜于有司机状态。
6•通过操作器的选层控制DO参数,可以选定电梯运行楼层(详见说明书第四萃涮试参数),可分别进行的层、双层.篡层及全程的试运行。
可以通过D1参数界面进行开关门抬令输入.进行开关门操作。
7.确认电梯在上述区间运行时均能正常起动,加速、减速至零速后平层停车。
若运行异常.请认真核査参数设宜是否有误。
5.2;
井道自学习故障诊断
故障代码
说明
处理方法
LER=O
系统运行保护
按Esc键退出,并査看系统运行故障记录,根据表按对应故障号的处理方法处理。
LER=1
脉冲输入反向
调整系统脉冲输入的相序。
将A相脉冲与B相脉冲对调或通过参数设宜将其对涮。
LER=2
下端站1重复输入
错误安装下端站造成多个端站信号输入或下端站1开关抖动。
请检査下端站1的安装c
LER=3
下端站1丢失
(S以上电梯)
■
下端站2先于下端站1到达或下端站1丢失.请检査下端站1的安装。
LER=4
下端站2垂复输入
(S以上电梯)
错误安装下端站2造成多个端站信号输入或下端站2开关抖动,请检査下端站2的安装。
LER=5
下端站2丢失
(S以上电梯)
>
上端站2先于下端站2到达或下端站2丢失.请检査下端站2的安装。
LER=6
上端站2重复输入
(S以上电梯)
错误安装上端站2适成多个端站信号输入或上端站2开关抖动,请检査上端站2的安装。
LER=8
上端站2丢失
(S以上电梯)
上端站1先于上端站2到达或上端站2丢失.请检査上端站2的安装。
LER=9
下端站1丢失
上端站1先于下端站1到达或下端站1丢失,请检査下端站1的安装。
LER=10
上端站1重复输入
错误安装上端站1造成多个端站信号输入或上端站1开关抖动,请检査上端站1的安装。
LER=11
上端站1丢失
上限位先于上端站1到达或上端站1丢失,请检査上端站1的安装。
LER=12
自学习总楼层数错
请査看总楼层设宜是否和实际楼层相符:
每一层的门区挡板是否装漏或挡板是否遮住门区开关。
LER=14
两门区开关没有重叠位置
该层门区挡板不能同时挡住两门区开关(请査看门区开关的安装〉或缺一个门区开关。
LER=15
自学习过程中按Esc键取消自学习
自学习过程中人为按Esc键取消自学习a
LER=17
门区1与门区2同时输入
两门区开关引线误装成并联、或下限位偏一楼平层位宜附近。
LER=18
自学习后保存井道数据错
J
▲请与木公司联系
LER=19
到上限位时,两门区信号同入.上限位开关安装过低
上限位开关上移
LER=20
下限位安装位宜过商
下限位开关下移
1
1
LER=21
自学习到上限位时
下端站或下端站2仍有效
检査下端站或下端站2的安装或开关类型是否正确
LER=22
自学习刚从下限位起车•时上端站或上端站2有效
检査上端站或上端站2的安装或开关类型是否正确
注意:
针对s以上的电梯,系统増设上、下端站2开关。
6・启动舒适感调整:
6.1带称重装置的启动舒适感调试
BL系列一体机可以使用如下三种称重:
1•蓝光总线称盒2:
-10V到10V称重。
3:
0-10V称重•可以通过
F9-13來选择。
在进行启动调整前,首先要保证称重已经进行过自学习,称重装宜能够如实的反映、T前轿厢内的负戦调整方法如下:
1•首先在轿箱空载时,通过调整F9£0使轿箱在空載状态下不溜,调整规则如下:
空载时,如松闸后向配重侧溜亿则加大F9・00仮之,如果向轿箱侧溜,则减小F9・00•通常情况下F9-00一般在45%到70%^间.
2•适十调整F9-19和F9・20•调整原则如下,如电梯平衡系数为45%,如F6・03为0,则将F9-19和F9-20设宜为
一(50・45)=—5即可。
如F6-03为1,,则将F9-19和F9-20设迓为(50-45)=5即可。
3.(
.空载调整成功后,如在满载情况下,启动效果与空载稍有不同,请适十调整F9・21,调整原则为,如在满找情
况下,启动松闸后向配重侧溜牟•则适、气减小F9-2K反之如启动松闸后向侨箱侧溜忆则适、“I加大F9-21o
下血是称重的原理框图:
经过以上调整后,就能获得较好的启动舒适感。
6.2无称重装置的启动舒适感调试
本产品在使用正氽弦PG卡时.可以通过FA组参数的合理设迓达到无负载补偿舒适起动的目地(即不使用称重装宜的情况下,达到具有负载补偿起动同样的效杲)。
1.使用无负载补偿起动的注总爭项:
1)PG类型确认,确认F8-02设宜为1(即选择正余弦PG卡
2)
3»称重补偿使能确认,确认F9・ll设辻为6即秤重补偿不使能。
此时FA组的参数才能起作
用。
4)驱动软件版木确认,确认驱动软件版木为0007以上版木。
2.无负载补偿起动的调整方法:
1)工作原理:
如图所示。
在抱闸打开时,通过正余弦PG卡反馈的位宜信息计算出、T前负载情况下维持电机位宜恒定电机所需的转矩,迅速的产生相应转矩,使曳引轮产生极小的位移.达到无负载补偿舒适起动的目地。
FA-07
二位脛反馈
图:
无负载补偿起动的工作原理示意图
2)1
3»相关参数:
无负載补偿起动调整的相关参数及推荐值如表所示。
表:
无负载补偿起动调整的相关参数表。
参数
No.
中文显示名称
出厂值
快闸推荐
慢闸推荐
FA-00
启动段比例増益
30
保持
•
保持
StratKP
FA-01
启动段积分増益
*
750
保持
保持
StratKI
FA-08
无负载比例1
3600
4800
3600
PLKP1
FA-09
无负载作用时间
900
700
保持
e
PLTime
FA-11
无负载比例1
800
保持
保持
PLKP2
FA-12
无负载比例系数
125
保持
保持
PLKPMOD
F2-00
提前开闸时间
1
BrakeONTime
F9-00
最大补偿力矩
0
保持
保持
ffI
MaxTorqComp
F9-11
补偿使能
1
0
0
LoadCompEnable
4)调整方法:
主雯调试FA组的三个参数:
FA-08.FA・09、FA-llo
FA-09
该参数为开闸后系统进行无负载补偿的作用时间.应参考实际抱闸开启的时间设宜。
如果该时间设宜过小,在抱闸没有完全打开时已经结束无补偿作用.将会溜午。
同时F2-00(提前开闸时间)要比该时间应略长约100ms.以便在速度曲线前结束无补偿作用。
FA-08与FA-11
无负载补偿启动的两个增益参数。
这两个参数可以观察曳引轮溜午情况以及乘坐舒适感进行调试,如果溜午过大,请増大FA-08设定值,如果电机发生振动.请减小FA・08设定值:
如果在维持段曳引轮有轻溜或轻微摆动.请加大FA-11.如维持段振动.请减小FA-llc
注意:
组参数,在调试中除介绍的三个参数外,可保持出厂值不变。
2•对于不同版木程序,FA组参数名称可能有所改变.但参数的位宜没有改变.即无论于操器版木.对应调试FA-08.FA-09xFA-11H个参数。
3.以上给出的推荐值只作为参考使用,现场PG卡的情况不同,请依据调试过程的说明.视现场具体乘坐感觉予以调整。
(
4.F9-00在无负载作用时.起到的是预宜力矩作用,一般情况下在现场无需设置.只需保持出厂值0即可。
7•快车舒适感的调整:
一体机必须控制电机使其反馈速度严格跟踪给定运行曲线的变化才能达到预期的舒适感。
速度环的比例増益F6-04和积分增益F605或分段PI的F795~F7・12参数也将影响曲线的跟踪程度。
通常增大比例増益会改善系统运行时的动态响应.提岛软踪的快速性。
但比例増益过大会引起系统的高频振动,电机噪声増大。
加大枳分会提商系统的抗扰动能力和跟踪能力,提尚平层精度,但过大的积分増盜会使系统振荡.表现为速度超调及运行时波浪式抖动。
通常先调节比例增益•在保证系统不振荡的前提下尽虽増大该值。
然后调节积分増益,使系统既有快速的响应特性又超调不大。
推荐速度环PI参数推荐值:
配置类型
Y
推荐值
速度环比例P
700
速度环积分1
260
速度环比例积分可以以50为单位进行调整。
起动或停车低速段运行效果不理想时.可以使用分段PI进行控制,详细方法见说明书内具体章节说明部分。
8.逻辑故障列表
故障代码
说明
处理方法
Er2
门联锁故障:
电梯运行时门锁回路断开
检査门联锁回路及门刀是否有刮碰门轮现象。
Er3
驱动故障
检查驱动故障代码.确定可能的故障原因并按相应的解决办法处理。
■
Er4
电梯运行方向与指令方向相反
1.改变输出相序,对调电机V.W相。
2.将主控板的A、B相输入脉冲对调或通过参数设豐将其对调。
Er5
开闸故障:
系统输出开闸指令后未接到抱闸监测开关的反馈信号,
KY6输出后X17(闸继电器反馈)内未反馈.或
X15(闸臂开关反馈)2秒内未反馈。
2.没有Y6输出,X17或X15有效。
1・
2.检查抱闸监测开关及接线。
3.无闸臂反馈开关开关应将闸臂反馈检测使能
(Brake,Feedback)设为OFF:
1Er29
通讯干扰过大保护(系统或并联通讯)
1.处理系统接地,消除干扰:
2.排査呼梯板或操纵盘是否有损坏,破坏CAN通讯总线。
1Er30
开门故障(轿厢不开门)
1、打检修,输入开门指令检査Y4是否有开门输出;
2、Y4无输出要检査开、关门限位开关的安装和信号的有效类型设宜。
3、贯通门时要注意前后门动作是否设豐反r.
1Er31
关门故障
一般是厅门轿门未安装好,强行封掉门联锁回路而产生,请注总关门输出与门联锁接触器的动作是否一致:
|Er32
楼层计数出错保护
外围端站和限位曾经瞬间停电,有可能导致楼号出错,该故障出现后电梯返回基站校对楼层计数。
1Er33
电机封星接触器故障。
KDY故障:
输出的KDY动作指令与反馈结果不一致:
1、Y8输出,XX在秒内没有反馈。
2、Y8无输出,XX有效。
3、(
•Y8撤消,XII在秒内反馈没有撤消(粘连)。
9・驱动故障列表
故障代码
显示
名称及内容
故障原因
解决方法
DF1
UV
欠压。
主回路直流俅线电圧低于欠压保护设定值(400V级,欠乐保护值约380V)»
输入电源缺相•瞬时停电输入电源的电压波动过大输入电源的接线端子松动
检查输入电源电压检查输入电源接线端子
DF2
0V
过压。
主回路直流僚线电压商于过压保护设定值(400V级,过斥保护值约760V)。
输入电源电压过髙
制动界常或无外接制动电阻减速曲线过急
检查输入电源检査制动电阻接线延缓减速曲线
DF3
0H
散热片过热
环境温度过高周困有发热体冷却风扇故障当前温度低干0度
降低环境温度
1
移开周困发热体检査冷却风扇接线及凤道
将FX・21(负温度报警使能)关闭。
DF4
IF
IPM故障
IPM过流或短路
IPM过温
IPM控制电源异常(欠压〉
检査输出是否短路检査电机是否短路否则请与厂家联系
DF5
0C
过流。
控制器输出电流超过了过流检岀值。
输出短路(线间短路.电机短路)
负载过大
曲线过急
检查输出及电机是否短路检查曲线是否过急,过急改缓
DF6
CF
CUP故障
(
电磁干扰过强
DF7
OS
超速。
电机速度反馈超过最大速度限制值且持续时间超过规定时间。
战大速度限制值及其持续时间值设貝不当
速度超调过大
编码器反馈不良
检査最大速度限制值及其持续时间参数设宜
•
检查速度坏Px1参数
检查编码器
DF8
OE
速度超差。
速度備差过大•
负载过大
检查机械系统,减轻负载
速度超过偏差设定值且持续时间超过规定时间。
曲线过急
偏差值及其规定时间设宜不十
编码器不良
减缓曲线
调整其参数设宜检查编码器
DF9
PGO
PG断线。
运行时未收到编码器信号且超过规定时间。
编码器接线断开、松动或接线错误编码器损坏
检查编码器连接检查编码器
DF10
FF
闪存错误
保存参数时.数据错误
请与厂家联系
DF11
BF
基极封锁错误
外部基极封锁接线错误基极封锁电平类型设宜错误
检查基极封锁端子接线更改基极封锁电平类型设置
DF12
OL
控制器过载。
电机电流超过额定值150%且持续60S或超过200%且持续10SQ
负载过大控制器容址过小
减小负载
更换适宜容虽控制器
DF13
MC
控制器主回路MC(接触器)动作不良。
给出吸合命令,在规定时间未吸合。
主回路MC的接线不良或损坏
试着断开再接通控制器电源如连续出现此保护•则与厂家联系或更换控制器
DF14
BR
制动故障
制动IGBT损坏或制动电阻缺损
检査制动电阻及其接线或更换控制器
DF15
OF
输出缺相
输出断线,输出端子松动,电机绕组断
 升级会员
升级会员 