一般单元在局部坐标系下的单元刚度矩阵.docx
《一般单元在局部坐标系下的单元刚度矩阵.docx》由会员分享,可在线阅读,更多相关《一般单元在局部坐标系下的单元刚度矩阵.docx(16页珍藏版)》请在冰点文库上搜索。
一般单元在局部坐标系下的单元刚度矩阵
一般单元在局部坐标系下的单元刚度矩阵
LT
9.3一般单元在局部坐标系下的单元刚度矩阵
1.杆端内力与位移关系回顾
(轴向);
;
(弯曲);
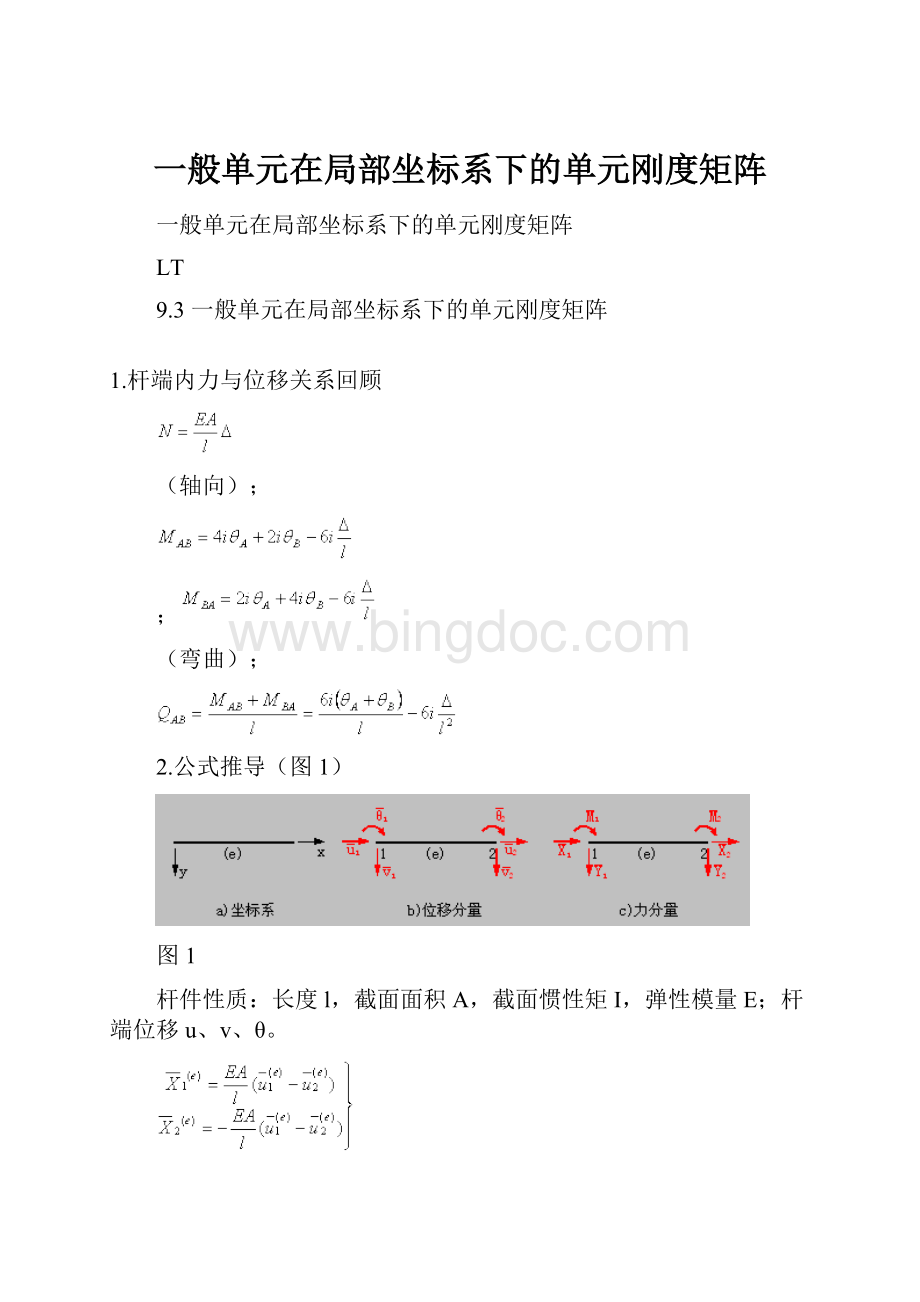
2.公式推导(图1)
图1
杆件性质:
长度l,截面面积A,截面惯性矩I,弹性模量E;杆端位移u、v、θ。
(1)
(2)
列成矩阵形式:
(3)
即:
(4)
局部坐标系下单元刚度矩阵:
(5)
9.4梁单元
1.简支梁
简支梁单元见图1。
图1
图1
分析(a)从数学的角度理解整体坐标系(xy)与局部坐标系(
)的区别;
(b)力分量应向整体坐标系转换,图f给出了两种坐标系下力分量之间的数学关系:
。
同理:
2.公式推导
矩阵形式:
(1)同理:
(2)
其中:
为单位坐标转换矩阵。
3.[T]的特性
正交矩阵:
其逆矩阵等于转置矩阵,即
。
α=0时,
(单位矩阵)。
9.7整体坐标系单元刚度矩阵
1.整体坐标系中的单元刚度矩阵
两种坐标系中单元刚度矩阵的转换关系为:
单元刚度矩阵的性质:
同局部坐标系下。
2.实例
例10-1:
图1结构,已知单元
(1)、
(2)在局部坐标系(杆件箭头方向)中的单元矩阵如下(单位:
长度m,角度rad,力kN),求各单元在整体坐标系下的刚度矩阵。
图1
分析:
→求[T]→求α→依据图形。
解:
(1)单元1:
α=0,
(2)单元2:
α=90
;
(3)单元2:
α=120
;
注意:
图中单元的方向,计算时宜取与整体坐标系相同(转角以逆时针为正)。
思考图2的求解。
图2
9.8位移法建立整体刚度矩阵
1.回顾
(1)连续梁的特点:
并考虑杆件的轴向变形;一般情况下,结构仅有转角位移。
(2)两端固定的梁,在近端有一转角θ,相应产生杆端弯矩:
4iθ(近端)和2iθ(远端)。
2.公式推导
图1两跨连续梁。
图1
结点力与结点力偶的关系见表1。
表1
位移
结点力偶
M1
M2
M3
θ1
4i1θ1
2i1θ1
0
θ2
2i1θ2
(4i1+4i2)θ2
2i2θ2
θ3
0
2i2θ3
4i2θ3
矩阵形式:
记为:
――整体刚度方程
其中:
――整体刚度矩阵
注意:
红、绿框中分别是单元
(1)和
(2)的单元刚度矩阵。
3.单元集成法的概念
基本思路:
考虑单元独立贡献,再叠加。
如图1。
图1
基本过程:
局部单元刚度矩阵→单元贡献矩阵→整体单元刚度矩阵
;
4.单元定位向量的概念
总码(整体分析):
结点位移在结构中统一编码,如1,2等;
局部编码(单元分析):
单元结点位移,如
(1),
(2)等。
单元定位向量(λ):
单元结点位移的总码组成的向量。
具体见图2和表1。
图2
表10-1
单元
局部码→总码
单元定位向量(λ)
①
(1)→1
(2)→2
②
(1)→2
(2)→3
任意单元
(i)→r
(j)→s
5.实例分析
求图10-11连续梁的整体刚度矩阵。
图10-11
分析:
固定端总码为0;总码的最后编号为n,则整体刚度矩阵为n×n阶。
解:
见表10-3
单元
单元刚度矩阵
定位向量
单元贡献矩阵
整体刚度矩阵
①
②
③
6.整体刚度矩阵的性质
Kij――第j个杆端位移分量取单位值1,其它杆端位移为0时所引起的第i个杆端力分量的值。
[K]是对称矩阵、可逆矩阵、和带状稀疏矩阵(非零元素集中在主对角线两侧的局部带宽之内)。
9.9 刚架整体刚度矩阵刚结点
1.问题的引出
(a)连续梁建立方法:
单元刚度矩阵通过单元定位向量形成整体刚度矩阵。
(b)刚架与连续梁的区别:
考虑轴向变形(有水平竖向位移)。
(c)必须采用整体坐标系,统一各杆的方向。
2.建立过程:
编码→单元定位向量→单元集成
编码原则:
已知位移分量为零的,总码为零;
位移分量不为零的,总码(每个结点)按顺序:
水平位移→竖向位移→转角位移;其方向由整体坐标系的方向确定。
一般结点顺序可按:
刚结点→支座;左→右;上→下。
注意处理支座情况和刚结点。
见图1。
图1
实例分析:
图1中a)和b)的单元单位向量见表1,整体刚度矩阵的集成过程见表2a和b。
表1
表10-5(图a)
表10-5(图b)
与刚性结点的区别
铰结点(两杆相交)编号有4个,两个线位移(水平和竖向)和两个铰位移,即两杆的线位移编号相同,角位移编号不同。
如图1。
图1
应用实例分析
图2中a)、b)和c)整体刚度矩阵的集成过程见表1a、b和c。
图2
分析:
图a和图b的区别在于支座变化;图c特殊:
杆①为链杆,仅有轴向变形(1和4)。
表1(图a)
表1(图b)
表1(图c)
 升级会员
升级会员 