实验三SIMULINK仿真技术实验.docx
《实验三SIMULINK仿真技术实验.docx》由会员分享,可在线阅读,更多相关《实验三SIMULINK仿真技术实验.docx(19页珍藏版)》请在冰点文库上搜索。
实验三SIMULINK仿真技术实验
实验三:
SIMULINK仿真技术实验
——SIMULINK常用模块应用及建模仿真、子系统与模块封装技术应用
一、SIMULINK常用模块应用及建模仿真
1、
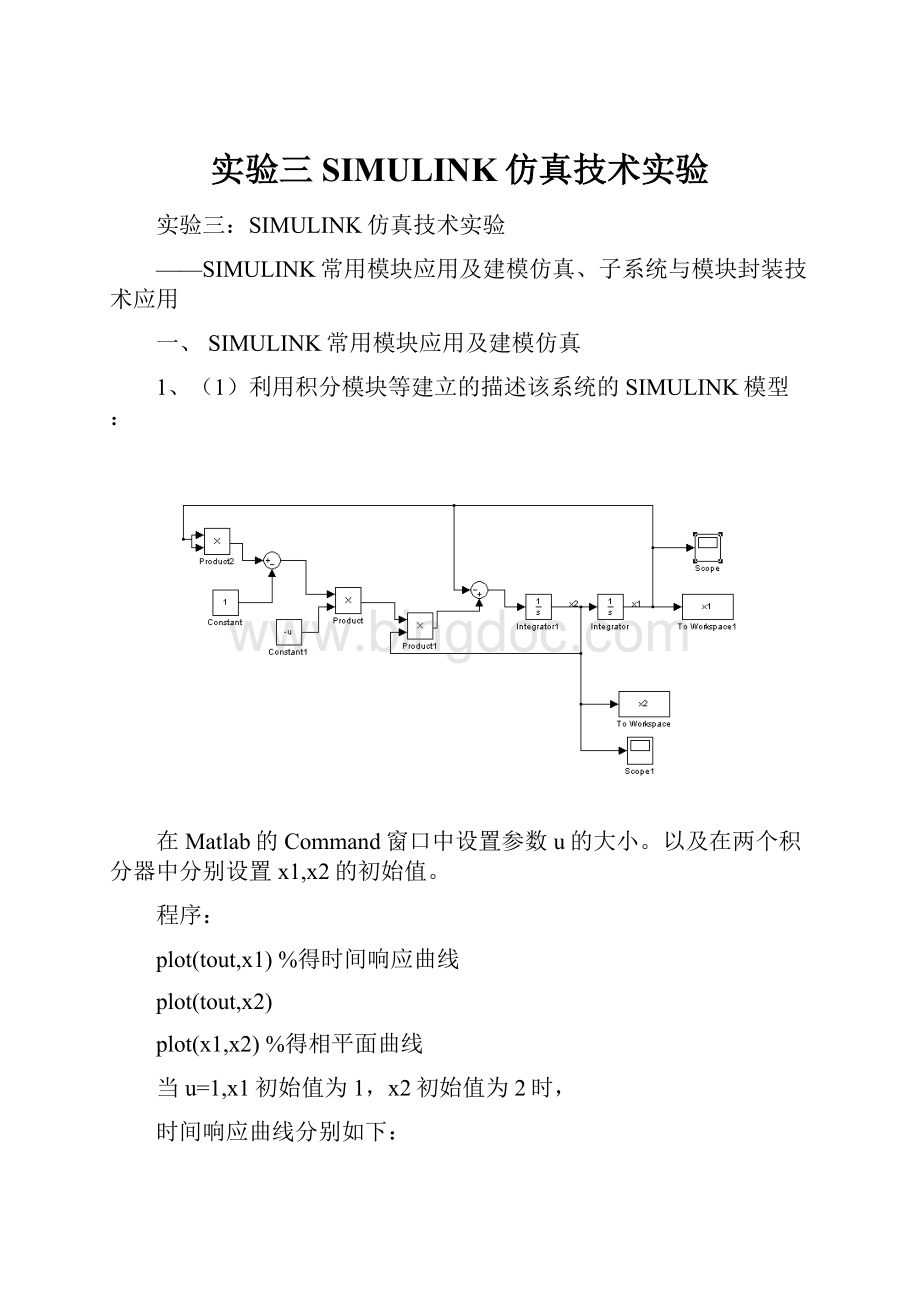
(1)利用积分模块等建立的描述该系统的SIMULINK模型:
在Matlab的Command窗口中设置参数u的大小。
以及在两个积分器中分别设置x1,x2的初始值。
程序:
plot(tout,x1)%得时间响应曲线
plot(tout,x2)
plot(x1,x2)%得相平面曲线
当u=1,x1初始值为1,x2初始值为2时,
时间响应曲线分别如下:
相平面曲线:
当u=2,x1初始值为-0.7,x2初始值为-0.7时,
时间响应曲线:
相平面曲线:
(2)simulink仿真模型如下所示:
得到的各曲线图和上题一样,以下不做叙述。
2、下图分别是基于SIMULINK的仿真数学模型。
第一个模型:
第二个模型:
3、第一种方法:
Simulink图形如下:
(注:
由于此处的y是一个1*1的矩阵,所以我选用了Display数值显示模块来显示y参数的大小。
)
在Matlab的Command窗口中输入[A,B,C,D]=linmod('lab31'),即可得到该模型的状态空间表达式如下:
A=
-1.00000-3.0000
1.0000-1.00000
-5.0000-1.0000-3.0000
B=
1.00000
00
01.0000
C=
-1.000000
D=
1-5
第二种方法:
Simulink图形如下所示:
在Matlab的Command窗口中输入[A,B,C,D]=linmod('lab31'),即可得到该模型的状态空间表达式如下:
A=
-1.00000-3.0000
1.0000-1.00000
-5.0000-1.0000-3.0000
B=
1.00000
00
01.0000
C=
-1.000000
D=
1-5
4、考虑双输入双输出系统的状态方程。
方法1:
将增益模块更改为矩阵增益;
>>plot(tout,xout)
>>plot(tout,yout)
输出曲线:
状态曲线:
方法2:
利用下列模块建立模型;
方法3:
利用LTI系统模块建立模型。
方法2和方法3中得到状态曲线和输出曲线的方法和方法1一样,在此不做叙述。
5、将下列给出的两个多变量系统传递函数矩阵分别用SIMULINK表示出来,其SIMULINK模型分别如下图所示:
二、SIMULINK子系统与模块封装技术应用
1、建立如同所示的模型,选择输入输出模块之间的所有模块创建子系统,得到创建带有子系统的模型和子系统模型。
解题步骤:
在SIMULINK中搭建如图所示模型图。
而后选中模型中除输入SignalGenerator和输出Terminator和Scope的所有基本模块组合,单机Edit下的GreatSubsystem,创建子系统,如下图所示。
2、线性系统由微积分方程组成:
(1)采用积分器方法在SIMULINK上建立的模型如下图所示:
(2)
三、基于SIMULINK的动态系统仿真应用
1、在SIMULINK下建立的仿真图形如下:
(2)将上图中的SIMULINK仿真模型的输入信号设置为单位阶跃信号,由此在MATLAB中运行后可由示波器直接观察输出信号的波形如下图所示。
2、电路如图所示,用示波器观察各支路电流的曲线。
Simulink仿真模拟图如下所示:
当频率为60HZ时,
当频率为20HZ时,
当频率为100HZ时,
3、在SIMULINK下,建立仿真模型,观察响应曲线。
SIMULINK仿真模型如下所示:
观察的响应曲线如下所示:
 升级会员
升级会员 