步进电动机.docx
《步进电动机.docx》由会员分享,可在线阅读,更多相关《步进电动机.docx(28页珍藏版)》请在冰点文库上搜索。
步进电动机
步进电动机
步进电动机
步进电动机是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。
把电脉冲信号变换成角位移以控制转子转动的微特电机。
在自动控制装置中作为执行元件。
每输入一个脉冲信号,步进电动机前进一步,故又称脉冲电动机。
步进电动机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。
步进电动机的驱动电源由变频脉冲信号源、脉冲分配器及脉冲放大器组成,由此驱动电源向电机绕组提供脉冲电流。
步进电动机的运行性能决定于电机与驱动电源间的良好配合。
分类
步进电动机分为机电式、磁电式及直线式三种基本类型。
机电式步进电动机
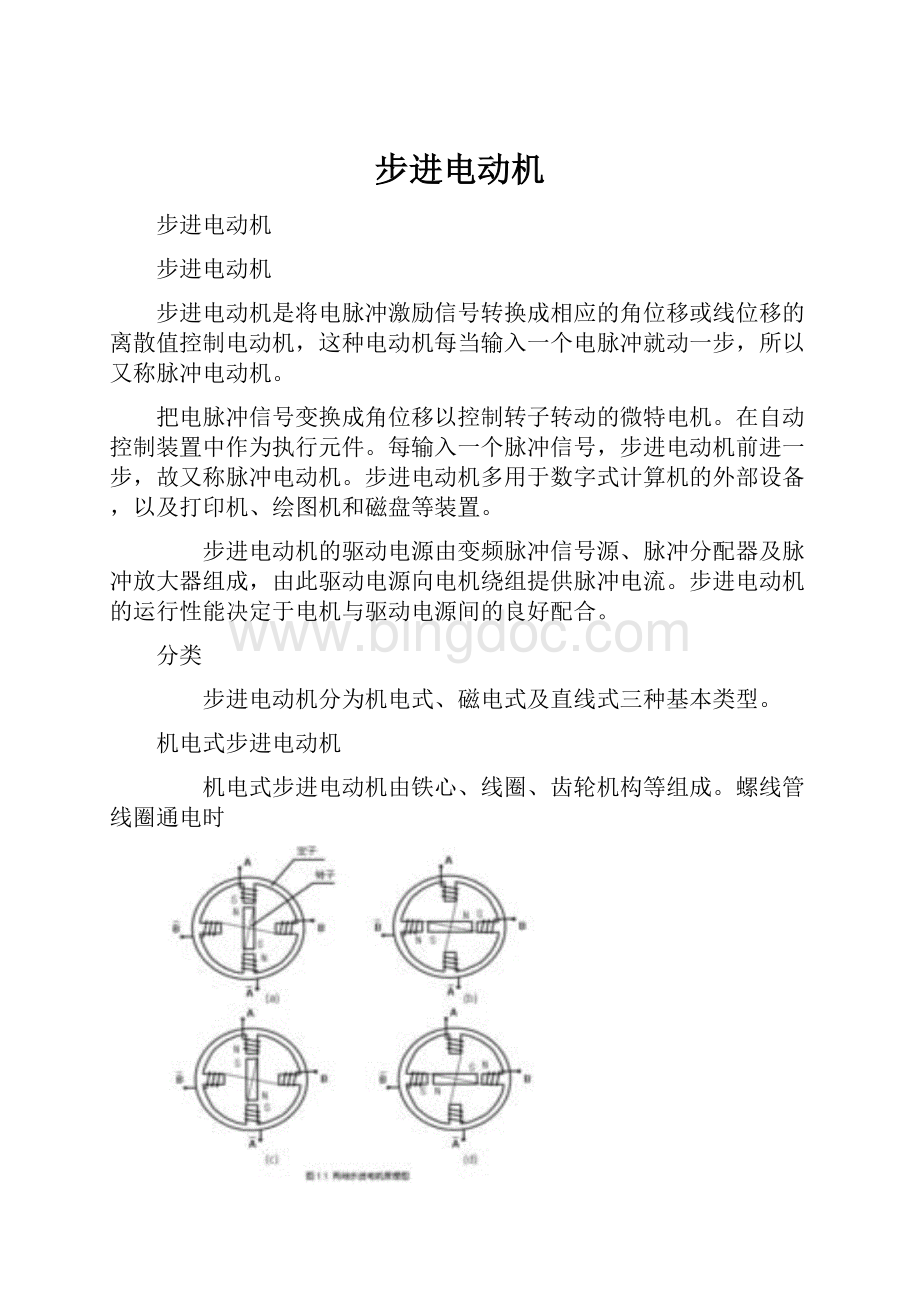
机电式步进电动机由铁心、线圈、齿轮机构等组成。
螺线管线圈通电时
步进电机工作原理
将产生磁力,推动其铁心心子运动,通过齿轮机构使输出轴转动一角度,通过抗旋转齿轮使输出转轴保持在新的工作位置;线圈再通电,转轴又转动一角度,依次进行步进运动。
磁电式步进电动机
磁电式步进电动机主要有永磁式、反应式和永磁感应子式3种形式。
永磁式步进电动机由四相绕组组成。
A相绕组通电时,转子磁钢将转向该相绕组所确定的磁场方向;A相断电、B相绕组通电时,就产生一个新的磁场方向,这时,转子就转动一角度而位于新的磁场方向上,被激励相的顺序决定了转子运动方向。
永磁式步进电动机消耗功率较小,步矩角较大。
缺点是起动频率和运行频率较低。
反应式步进电动机在定、转子铁心的内外表面上设有按一定规律分布的相近齿槽,利用这两种齿槽相对位置变化引起磁路磁阻的变化产生转矩。
这种步进电动机步矩角可做到1°~15°,甚至更小,精度容易保证,起动和运行频率较高,但功耗较大,效率较低。
永磁感应子式步进电动机又称混合式步进电动机。
是永磁式步进电动机和反应式步进电动机两者的结合,并兼有两者的优点。
实用的步进电机驱动电路
直线式步进电动机
有反应式和索耶式两类。
索耶式直线步进电动机由静止部分(称为反应板)和移动部分(称动子)组成。
反应板由软磁材料制成,在它上面均匀地开有齿和槽。
电机的动子由永久磁铁和两个带线圈的磁极A和B组成。
动子是由气垫支承,以消除在移动时的机械摩擦,使电机运行平稳并提高定位精度。
这种电机的最高移动速度可达1.5米/秒,加速度可达2g,定位精度可达20多微米。
由两台索耶式直线步进电动机相互垂直组装就构成平面电动机。
给x方向和y方向两台电机(图3)以不同组合的控制电流,就可以使电机在平面内做任意几
用单片机控制的四相步迸电动机的电路图
何轨迹的运动。
大型自动绘图机就是把计算机和平面电动机组合在一起的新型设备。
平面电动机也可用于激光剪裁系统,其控制精度和分辨力可达几十微米。
应用
主要用于数字控制系统中,精度高,运行可靠。
如采用位置检测和速度反馈,亦可实现闭环控制。
步进电动机已广泛地应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表等之中,另外在工业自动化生产线、印刷设备等中亦有应用。
窗体顶端
严禁交易QQ号码、非正规渠道Q币、非法来源的会员与钻石服务、手机代开服务等;交易双方将可能受到处罚。
管理规则>>
温馨提示:
请您在购买前仔细查看款式细节图片,注意面料厚薄和弹性,并根据您的身材选择合适的尺码。
如有需要,请咨询卖家(点击上面QQ交谈按钮)。
属性信息仅供参考,详细情况请向卖家咨询!
85BYGH450A-06步进电机雕刻机专用雕刻机配件
电压:
220V
电流:
4A 轴直径:
14mm
净重:
2.2kg
机身长度:
82mm
出轴长度:
33mm
ElectricalSpecifications(技术数据)
型号
相数
电流
(A)
电阻
(Ω)
电感
(mH)
最大静转矩
(Kg.cm)
转动惯量
(g.cm2)
重量
(Kg)
外形尺寸
接线图
外型图
LO(mm)
L1(mm)
3.5
0.5
2.5
18
1400
1.7
75
37
Wdg.A
2
4.5
0.44
2.5
21
1400
1.7
75
37
Wdg.A
4
3.0
1.0
4.05
23
1400
1.7
75
37
Wdg.B
85BYGH450A-06
2
4.0
0.53
2.3
24
1400
1.7
75
37
Wdg.A
2
5.0
0.28
1.45
25
1400
1.7
75
37
Wdg.A
2
4.0
1.05
7.95
42
1400
1.7
75
37
Wdg.A
2
2.0
1.4
10
24
1400
1.7
75
37
Wdg.A
2
2.0
2.9
12
42
2700
2.8
113
37
Wdg.A
2
4.5
0.73
3.5
42
2700
3.5
113
37
Wdg.A
4
2.0
3.2
12
60
2700
2.8
113
37
Wdg.B
4
4.2
0.85
4.2
61
2700
2.8
113
37
Wdg.B
2
4.0
0.7
4.5
50
2700
2.8
113
37
Wdg.A
4
5.0
0.62
3.5
42
2700
2.8
113
37
Wdg.B
4
3.0
1.6
6.65
60
2700
2.8
113
37
Wdg.B
4
2.0
3.90
24
63
4000
3.8
151
37
Wdg.B
4
3.0
2.0
12.2
67
4000
3.8
151
37
Wdg.B
3.8
151
37
(一)单定子、径向分相、反应式步进电机的工作原理
按电磁铁的作用原理
1.当A相绕组通电(用直流电压激磁)时;形成A相定子磁极(AA方向磁场),产生反应力,吸引转子转过一定的角度,使转子齿与A相定子磁极小齿对齐。
2.当A相绕组断电,B相绕组通电时,形成B相定子磁极(BB方向磁场),产生反应力,吸引转子顺时针转过3°,使转子齿与B相定子磁极小齿对齐。
3.以次类推…………
若控制线路不停地按A-B-C-A…顺序控制步进电机各相绕组的通断电,步进电机的转子便不停地顺时针转动;若通电顺序改为A-C-B-A…,步进电机的转子将逆时针转动。
这种通电方式称为三相三拍通电方式;此时定子绕组的通电状态每改变一次,转子转过3°。
若控制线路不停地按A-AB-B-BC-C-CA-A…顺序控制步进电机各相绕组的通断电,这种通电方式称为三相六拍通电方式。
当从A相通电转为A和B同时通电时,转子齿将同时受到A相绕组产生的磁场和B相绕组产生的磁场的共同吸引,转子齿只好停在A和B两相磁极之间,转子转过1.5°。
当由A和B两相同时通电转为B相通电时,转子再沿顺时针方向旋转1.5°,使转子齿与B相磁极对齐。
……依此类推。
在三相六拍通电时,定子绕组的通电状态每改变一次,转子转过1.5°。
与三相三拍通电方式相比,可使每次转角缩小一半。
步进电机定子绕组的通电状态每改变一次,它的转子转过的一个确定角度,称为步进电机的步距角a。
步距角a的计算公式:
其中,m为定子绕组的相数,Z为转子的齿数,K为通电方式系数;当m相m拍通电时,k=1;m相2m拍通电时,k=2
(二)、五相五定子、轴向分相、反应式步进电机工作原理介绍
步进电机的定子和转子在轴向分为五段,每一段都形成独立的一相定子铁心、定子绕组和转子;各段定子铁心形如内齿轮,由硅钢片叠成;各段定子上的在圆周方向均匀分布,彼此之间错开1/5齿距;各段转子形如外齿轮,也由硅铁片叠成;各段转子齿彼此不错位。
若控制线路不停地按A-B-C-D-E-A-…顺序控制步进电机各相绕组的通断电,这种通电方式称为五相五拍通电;若控制线路不停地按AB-ABC-BC-BCD-CD-CDE-DE-DEA-EA-EAB-AB…顺序控制步进电机各相绕组的通断电,这种通电方式称为五相十拍通电;步距角a的计算仍可采用上述计算公式。
小结:
1.步进电机受脉冲电流控制,转子的角位移正比于输入脉冲的数量,转子的角速度正比于输入脉冲的频率,转子的旋转方向取决于定子绕组的通电顺序。
2.步进电机有一定的步距误差,但没有累计误差。
3.若维持控制绕组的电流不变,则步进电机就可停在某一位置不动。
步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于微电脑发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时您可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用.
步进电机的种类和特点
步进电机在构造上有三种主要类型:
反应式(VariableReluctance,VR)、永磁式(PermanentMagnet,PM)和混合式(HybridStepping,HS)。
反应式:
定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
永磁式:
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
混合式:
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步矩角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本步矩角为1.8°/步,配上半步驱动器后,步矩角减少为0.9°,配上细分驱动器后其步矩角可细分达256倍(0.007°)。
由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进电机可配不同细分的驱动器以改变精度和效果。
1.基本结构:
2.工作原理:
简单的讲,步进电机驱动器根据外来的脉冲,通过其内部的逻辑电路控制步进电机的绕组按一定的次序正反通电,从而实现其运转。
以两相1.8度,步进电机为例,
其主要分为4线(双极性),6线(单极性)两种方式:
线(双极性)电机,当其绕组的通电方向顺序按照AC->BD->CA->DB四个状态周而复始进行变化,每变化一次,电机运转一步,即1.8度。
6线(单极性)电机,当其绕组的通电方向顺序按照OA->OB->OC->OD四个状态周而复始进行变化,每变化一次,电机运转一步,即1.8度。
步进电机最早是在1920年代由英国人所开发。
1950年代后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易。
往后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中。
在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多。
步进电机依其构造上的差异可分为三大类:
(下图一)
·可变磁阻式(VR型):
转子以软铁加工成齿状,当定子线圈不加激磁电压时,保持转矩为零,故其转子惯性小、响应性佳,但其容许负荷惯性并不大。
其步进角通常为15°。
·永久磁铁式(PM型):
转子由永久磁铁构成,其磁化方向为辐向磁化,无激磁时有保持转矩。
依转子材质区分,其步进角有45°、90°及7.5°、11.25°、15°、18°等几种。
·混和式(HB型):
转子由轴向磁化的磁铁制成,磁极做成复极的形式,其乃兼采可变磁阻式步进电机及永久磁铁式步进电机的优点,精确度高、转矩大、步进角度小。
(图一)
目前市场上所使用的工业用步进电机,以混和式(HB型)最为普遍。
步进电机的特征
高精度的定位:
步进电机最大特征即是能够简单的做到高精度的定位控制。
以5相步进电机为例:
其定位基本单位(分辨率)为0.72°(全步级)/0.36°(半步级),是非常小的;停止定位精度误差皆在±3分(±0.05°)以内,且无累计误差,故可达到高精度的定位控制。
(步进电机的定位精度是取决于电机本身的机械加工精度)
位置及速度控制:
步进电机在输入脉冲信号时,可以依输入的脉冲数做固定角度的回转进而得到灵活的角度控制(位置控制),并可得到与该脉冲信号周波数(频率)成比例的回转速度。
具定位保持力:
步进电机在停止状态下(无脉波信号输入时),仍具有激磁保持力,故即使不依靠机械式的剎车,也能做到停止位置的保持。
动作灵敏:
步进电机因为加速性能优越,所以可做到瞬时起动、停止、正反转之快速、频繁的定位动作。
开回路控制、不必依赖传感器定位:
步进电机的控制系统构成简单,不需要速度感应器(ENCODER、转速发电机)及位置传感器(SENSOR),就能以输入的脉波做速度及位置的控制。
也因其属开回路控制,故最适合于短距离、高频度、高精度之定位控制的场合下使用。
中低速时具备高转矩:
步进电机在中低速时具有较大的转矩,故能够较同级伺服电机提供更大的扭力输出。
高信赖性:
使用步进电机装置与使用离合器、减速机及极限开关等其它装置相较,步进电机的故障及误动作少,所以在检查及保养时也较简单容易。
小型、高功率:
步进电机体积小、扭力大,尽管于狭窄的空间内,仍可顺利做安装,并提供高转矩输出。
步进电机的速度—转矩特性
速度-转矩特性取决于电机及驱动器,尤其与所搭配的驱动器有着极大的影响;使用的驱动器不同,特性上的差异也就会有明显的不同。
(图二)
步进电机速度-转矩特性曲线图(图二)说明:
(1)激磁最大静止转矩:
当运转脉冲速度等于0Hz时,曲线与Y轴交接的点即称为激磁最大静止转矩。
也就是指电机在通电但无输入脉冲信号的情况下,其所具备的保持转矩即称为激磁最大静止转矩。
(2)脱出转矩:
又称最大转矩,为电机于运转时所能带动的最大负荷。
(3)最大响应频率:
在无负载、负荷惯性为0时,电机所能够响应之最快的速度。
(4)最大自起动频率:
电机在无载的状态下可以做到瞬时的起动而不失步的速度谓之最大自起动频率。
二相与五相步进电机的差异
步进电机主要是依相数来做分类,而其中又以二相、五相步进电机为目前市场上所广泛采用。
二相步进电机每转最细可分割为400等分,五相则可分割为1000等分,所以表现出来的特性以五相步进电机较佳、加减速时间较短、动态惯性较低。
二相/五相步进电机差异比较:
二相步进电机
五相步进电机
电机构造(请参照图三)
8个主极‧4相(2相)4极线圈
10个主极‧5相2极线圈
分解能
1.8°/0.9°(200、400分割/圈)
0.72°/0.36°(500、1000分割/圈)
较二相步进电机高出2.5倍
分解能。
振动性
100-200PPS之间为低速共振领域,
振动较大
无显著共振点
低振动
速度—转矩特性
于速度上不及五相步进电机
高速度、高转矩
(图三)
二相/五相步进电机基本性能汇整比较:
◎优/○良/△稍差
分解能
振动
速度
角度精度
响应性
转矩
噪音
二相步进电机
○
△
○
◎
○
◎
△
五相步进电机
◎
◎
◎
◎
◎
◎
◎
步进电机的驱动系统
步进电机在单单仅给予电压时,电机是不会动作的,必须透过脉波产生器提供位置(脉波数)、速度的脉波信号指令,以及驱动器驱动电流流过电机内部线圈、依顺序切换激磁相序的方式才能够让电机运转。
所以欲使步进电机动作的必要系统组成有:
1.脉冲产生器:
给予角度(位置移动量)、动作速度及运转方向之脉冲信号的电机驱动指令。
2.步进驱动器:
依控制器所投入的脉冲信号指令,提供电流来驱动步进电机动作。
3.步进电机:
提供转矩动力输出来带动负载。
所以步进电机系统构成简单,不需要速度感应器(ENCODER、转速发电机)、位置传感器(SENSOR),即能依照脉冲产生器所输入的脉冲来做到速度及位置的控制。
步进电机的速度、位置控制
速度控制:
步进电机的运转速度会与输入的脉冲速度成等比例的关系,所以在脉冲的速度愈快时,步进电机的转速也会跟着加快;脉波速度愈慢时,电机的转速自然也跟着变慢。
电机的运转速度(RPM)与脉冲速度(PPS,又称Hz)间的关系式如下:
电机的运转速度(RPM)=脉冲速度(PPS或Hz)× 60 ÷ 步进电机分割数/圈
说明:
1.RPM为一般电机的速度单位,即rev/min,为每分钟电机所转的圈数;PPS为步进、伺服电机的速度单位,即pulsepersecond,为每秒所送出的脉冲数。
2.由于RPM与PPS的单位不同,所以于转换的过程中要先将PPS的秒钟乘以60变为分钟。
3.步进电机分割数/圈,又代表要让电机转一圈所必须送出的脉冲数。
4.上述公式拆解后之单位表示为
→rev/min=pulse/sec×60×1/分割数
实例:
五相半步级角0.36°时(即1000分割/圈)
(1)电机的运转速度600RPM时,即相当于脉冲速度10,000PPS。
(2)脉冲速度3,000PPS,即相当于电机的运转速度180RPM。
位置控制:
步进电机不需要位置传感器(SENSOR),就可依照输入的脉冲数决定移动量,并将负载顺利、正确的送达指定位置点上。
而移动量的大小,是依照电机分辨率的大小与输入的脉冲数来决定。
脉冲数(PULSE)与移动量间的关系式如下:
位置移动量(°)=步进电机分辨率(°)× 输入脉冲数
实例:
二相全步级角1.8°时
*当输入1000个脉冲数(即1000PULSE),此时之移动量会是1800°,刚好为5圈。
步进电机疑难杂症处理
如何有效改善步进电机的温升问题?
可依下列步骤作做检查及确认:
1.是否用于连续运转的场合?
(步进电机的特性并不适合于连续运转的场合下使用,在此场合下使用时一定会有较高的温升产生。
请重新确认机构动作需求条件并重新评估使用的电机。
)
2.请确认机构动作频度、周期?
(走停的动作频度过高将可能因脉冲输入停止的时间过短而导致电流尚未下降就又重新激活,故此时的温升一定会较高。
建议您可将动作频度降低以改善温升问题。
3.将RUN电流调小情况可否改善?
(在转矩足够的情况下将驱动器的RUN电流调小将可有效的使温升降低。
但若因扭力的关系一定得使用到较大的电流时,则建议您可将电机更换为大一等级的电机后再将电流调低以改善温升问题。
)
4.将STOP电流调小情况可否改善?
(在保持力足够的情况下将驱动器的STOP电流调小将可于电机停止时有效的使温升降低。
但若因停止保持力的关系一定得使用到较大的STOP电流时,则建议您可将电机更换为大一等级的电机后再将电流调低以改善温升问题。
)
5.驱动器上的指拨开关是否打开电流自动降低档?
(若未打开,电机停止时电流将无法自动下降,温升会因此而较高。
建议使用此功能,将可避免步进电机及驱动器的温升问题。
)
6.目前使用的速度是否界于温升较高(即电流较大)的范围内?
(由特性曲线图中的电流曲线得知)
(请尽量避开温升较高的速度范围使用,对于温升的降低将有帮助。
)
7.周围环境温度如何?
是否过高?
(电机温度=环境温度+电机温升,故环境温度较高时,电机的温度也会因此而较高。
建议以加装安装散热面板或散热风扇的方式来帮助散热。
)
8.请确认电机端的接线是否正确?
(相位接错将造成电机运转不顺的抖动现象,亦可能因此而产生温升较高的问题。
)
步进电机是适应机电一体化需要而得到广泛使用的一种执行元件。
由于更易于用计算机控制,步进电机在自动化控制系统中的起到了很大的作用。
随着计算机和自动化技术的发展,步进电机的使用范围还会进一步扩大。
步进电机的发展过程
步进电机的历史非常久远,早在19世纪,人们就已经发明了步进电机。
这种最古老的步进电机,实际上是一种能够自由回转的电磁铁。
可以说老式的步进电机在工作原理上与现在的反应式步进电机没有太大的区别,都是依靠气隙磁导的变化产生电磁转矩。
步进电机相关的技术,在20世纪得到了长足的发展,这是源于人们对造船等工业的生产需要。
步进电机飞跃式发展是在20世纪的80年代以后,当计算机出现、计算机技术逐步成熟后,步进电机的控制方式有了完全的变化,各种灵活的控制方式相继出现。
步进电机最早的控制系统非常繁琐,需要复杂的安装和调试过程,并且难以改变。
计算机应用后,步进电机的控制变成非常简单的事情,而用计算机软件控制步进电机也成为了当时发展的必然趋势,同时,步进电机与计算机的配合也符合数字化时代的发展需要。
步进电机的种类
步进电机电机发展至今已经衍生出多个种类,常用的步进电机有反应式步进电机、永磁式步进电机、混合式步进电机和单相式步进电机等,其中应用最广泛的是反应式步进电机。
反应式步进电机是以软磁制成转子磁路,定子上有多相励磁绕组,以磁导的变化来产生转矩。
反应式步进电机又称为磁阻式步进电机,其典型是一台三相电机,定子铁心由硅钢片叠成,定子上有6个磁极,每个磁极上又各有5个均匀分布的矩形小齿。
三相直线步进电机共有三套定子控制绕组,绕在径向相对的两个磁极上的一套绕组为一相。
转子也是由叠片铁心构成,转子上没有绕组,而是由40个矩形小齿均匀分布在圆周上,相邻两齿之间的夹角为9度。
按励磁方式分类,步进电机可分为反应式、永磁式和感应子式。
其中反应式步进电机用的比较普遍,结构也较简单。
其工作原理。
当某相绕组通电时,对应的磁极就会产生磁场,并与转子形成磁路。
若此时定子的小齿与转子的小齿没有对齐,则在磁场的作用下,转子转动一定的角度使转子齿与定子齿对应。
由此可见,错齿是促使步进电机旋转的根本原因。
例如,在单三拍运行方式中,当A相控制绕组通电,而B、C相都不通电时,由于磁通具有力图走磁阻最小路径的特点,所以转子齿与A相定子齿对齐。
若以此作为初始状态,设与A相磁极中心磁极的图1步进电机剖面
 升级会员
升级会员 