工业机器人技术及应用(教案)2-工业机器人的机械结构和运动控制Word下载.doc
《工业机器人技术及应用(教案)2-工业机器人的机械结构和运动控制Word下载.doc》由会员分享,可在线阅读,更多相关《工业机器人技术及应用(教案)2-工业机器人的机械结构和运动控制Word下载.doc(12页珍藏版)》请在冰点文库上搜索。
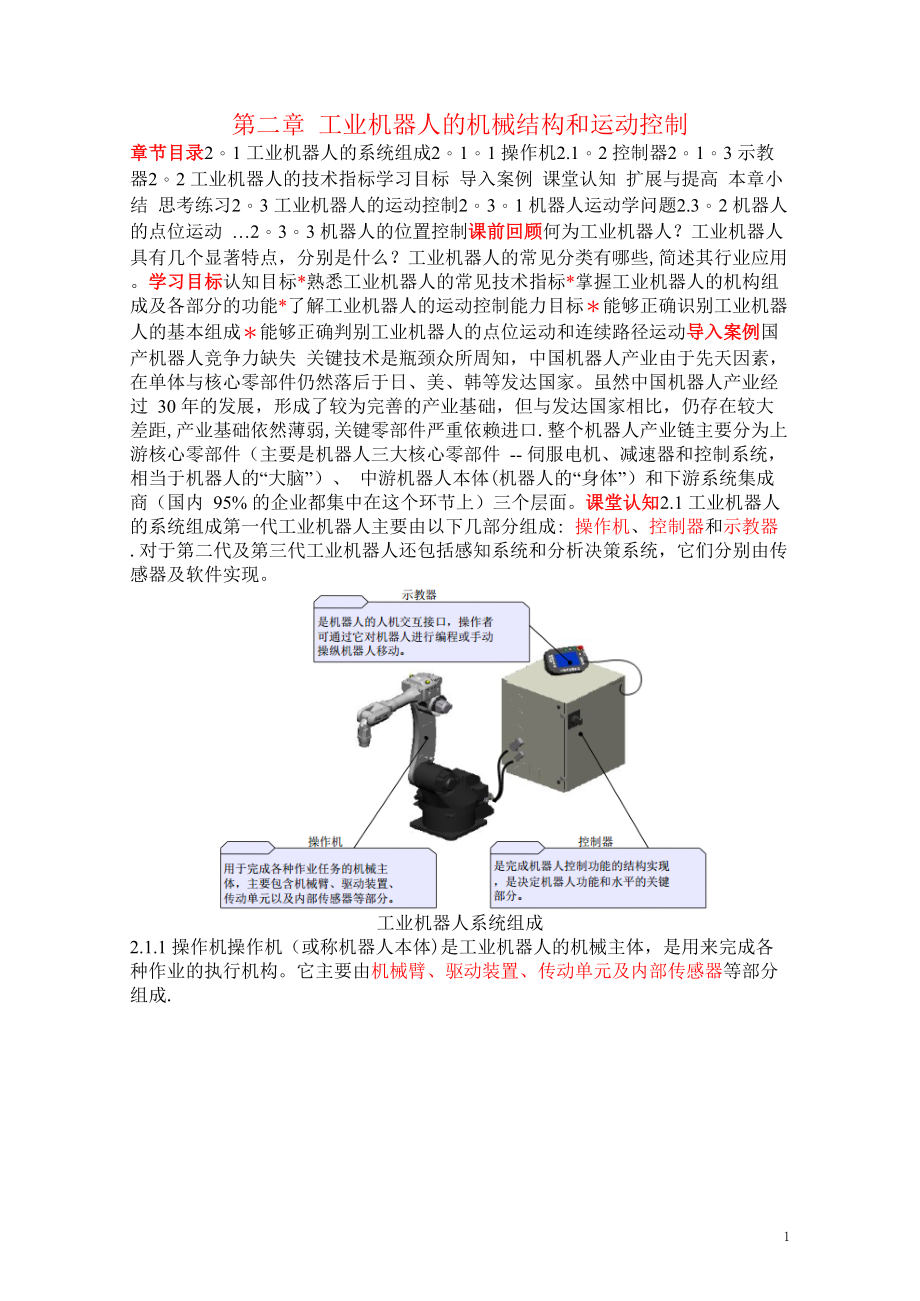
课堂认知2.1工业机器人的系统组成第一代工业机器人主要由以下几部分组成:
操作机、控制器和示教器.对于第二代及第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器及软件实现。
工业机器人系统组成
2.1.1操作机操作机(或称机器人本体)是工业机器人的机械主体,是用来完成各种作业的执行机构。
它主要由机械臂、驱动装置、传动单元及内部传感器等部分组成.
关节型机器人操作机基本构造
机器人操作机最后一个轴的机械接口通常为一连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等。
(1)机械臂关节型工业机器人的机械臂是由关节连在一起的许多机械连杆的集合体。
实质上是一个拟人手臂的空间开链式机构,一端固定在基座上,另一端可自由运动,由关节-连杆结构所构成的机械臂大体可分为基座、腰部、臂部(大臂和小臂)和手腕4部分。
1)基座基座是机器人的基础部分,起支撑作用。
2)腰部腰部是机器人手臂的支承部分。
3)手臂手臂是连接机身和手腕的部分,是执行结构中的主要运动部件,亦称主轴,主要用于改变手腕和末端执行器的空间位置。
4)手腕手腕是连接末端执行器和手臂的部分,亦称次轴,主要用于改变末端执行器的空间姿态.
(2)驱动装置驱使工业机器人机械臂运动的机构。
它按照控制系统发出的指令信号,借助于动力元件使机器人产生动作,相当于人的肌肉、筋络。
机器人常用的驱动方式主要有液压驱动、气压驱动和电气驱动三种基本类型。
目前,除个别运动精度不高、重负载或有防爆要求的机器人采用液压、气压驱动外,工业机器人大多采用电气驱动,而其中属交流伺服电机应用最广,且驱动器布置大都采用一个关节一个驱动器。
三种驱动方式特点比较
(3)传动单元目前工业机器人广泛采用的机械传动单元是减速器,应用在关节型机器人上的减速器主要有两类:
RV减速器和谐波减速器。
一般将RV减速器放置在基座、腰部、大臂等重负载的位置(主要用于20kg以上的机器人关节);
将谐波减速器放置在小臂、腕部或手部等轻负载的位置(主要用于20kg以下的机器关节).此外,机器人还采用齿轮传动、链条(带)传动、直线运动单元等。
机器人关节传动单元
1)谐波减速器通常由3个基本构件组成,包括一个有内齿的刚轮,一个工作时可产生径向弹性变形并带有外齿的柔轮和一个装在柔轮内部、呈椭圆形、外圈带有柔性滚动轴承的波发生器,在这3个基本结构中可任意固定一个,其余一个为主动件一个从动件。
谐波减速器原理图
2)RV减速器主要由太阳轮(中心轮)、行星轮、转臂(曲柄轴)、转臂轴承、摆线轮(RV齿轮)、针齿、刚性盘与输出盘等零部件组成。
具有较高的疲劳强度和刚度以及较长的寿命,回差精度稳定,高精度机器人传动多采用RV减速器.
RV减速器原理图
2。
2控制器机器人控制器是根据指令以及传感信息控制机器人完成一定动作或作业任务的装置,是决定机器人功能和性能的主要因素,也是机器人系统中更新和发展最快的部分,其基本功能有:
示教功能、记忆功能、位置伺服功能、坐标设定功能、与外围设备联系功能、传感器接口、故障诊断安全保护功能等。
依据控制系统的开放程度,机器人控制器分3类:
封闭型、开放型和混合型。
目前基本上都是封闭型系统(如日系机器人)或混合型系统(如欧系机器人)。
按计算机结构、控制方式和控制算法的处理方法,机器人控制器又可分为集中式控制和分布式控制两种方式。
(1)集中式控制器优点:
硬件成本较低,便于信息的采集和分析,易于实现系统的最优控制,整体性与协调性较好,基于PC的系统硬件扩展较为方便。
缺点:
系统控制缺乏灵活性,控制危险容易集中,一旦出现故障,其影响面广,后果严重;
大量数据计算,会降低系统实时性,系统对多任务的响应能力也会与系统的实时性相冲突;
系统连线复杂,会降低系统的可靠性.
a)单独接口卡驱动b)多轴运动控制卡驱动集中式机器人控制器结构
(2)分布式控制器主要思想为“分散控制,集中管理”,为一个开放、实时、精确的机器人控制系统。
分布式系统中常采用两级控制方式,由上位机和下位机组成。
优点:
系统灵活性好,控制系统的危险性降低,采用多处理器的分散控制,有利于系统功能的并行执行,提高系统的处理效率,缩短响应时间。
分布式机器人控制器结构
2.1.3示教器亦称示教编程器或示教盒,主要由液晶屏幕和操作按键组成。
可由操作者手持移动。
它是机器人的人机交互接口,机器人的所有操作基本上都是通过它来完成的。
示教器实质上就是一个专用的智能终端.
示教时的数据流关系
2工业机器人的技术指标机器人的技术指标反映机器人的适用范围和工作性能。
一般都有:
自由度、工作空间、额定负载、最大工作度速和工作精度等。
自由度:
物体能够对坐标系进行独立运动的数目,末端执行器的动作不包括在内.通常作为机器人的技术指标,反映机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示,目前,焊接和涂装作业机器人多为6或7自由度,而搬运、码垛和装配机器人多为4~6自由度。
额定负载:
也称持重.正常操作条件下,作用于机器人手腕末端,不会使机器人性能降低的最大载荷,目前,使用的工业机器人负载范围可从0.5kg直至800kg。
工作精度:
机器人的工作精度主要指定位精度和重复定位精度。
定位精度(也称绝对精度)是指机器人末端执行器实际到达位置与目标位置之间的差异。
重复定位精度(简称重复精度)是指机器人重复定位其末端执行器于同一目标位置的能力,目前,工业机器人的重复精度可达±
0。
01~±
0.5mm。
依据作业任务和末端持重不同,机器人重复精度亦不同。
工业机器人典型行业应用的工作精度
作业任务
额定负载(kg)
重复定位精度(mm)
搬运
5~200
±
2~±
5
码垛
50~800
0.5
点焊
50~350
3
弧焊
3~20
08~±
0.1
喷涂
5~20
2~5
02~±
0.03
装配
6~10
06~±
0.08
10~20
06~±
工作空间也称工作范围、工作行程.工业机器人执行任务时,其手腕参考点所能掠过的空间,常用图形表示。
目前,单体工业机器人本体的工作范围可达3.5m左右。
最大工作速度在各轴联动情况下,机器人手腕中心所能达到的最大线速度.这在生产中是影响生产效率的重要指标。
a)垂直串联多关节机器MOTOMANMH3Fb)水平串联多关节机器人MOTOMANMPP3S
c)并联多关节机器人MOTOMANMYS650L不同本体结构YASKAWA机器人工作范围
2.3工业机器人的运动控制2。
1机器人运动学问题工业机器人操作机可看作是一个开链式多连杆机构,始端连杆就是机器人的基座,末端连杆与工具相连,相邻连杆之间用一个关节(轴)连接在一起。
对于一个6自由度工业机器人,它由6个连杆和6个关节(轴)组成。
编号时,基座称为连杆0,不包含在这6个连杆内,连杆1与基座由关节1相连,连杆2通过关节2与连杆1相连,依此类推.
a)实物图b)机构简图工业机器人操作机
(1)运动学正问题对给定的机器人操作机,己知各关节角矢量,求末端执行器相对于参考坐标系的位姿,称之为正向运动学(运动学正解或Where问题),机器人示教时,机器人控制器即逐点进行运动学正解运算。
(2)运动学逆问题对给定的机器人操作机,已知末端执行器在参考坐标系中的初始位姿和目标(期望)位姿,求各关节角矢量,称之为逆向运动学(运动学逆解或How问题),机器人再现时,机器人控制器即逐点进行运动学逆解运算,并将矢量分解到操作机各关节.
运动学正问题(示教)运动学逆问题(再现)
2机器人的点位运动和连续路径运动
(1)点位运动(PointtoPoint,PTP)PTP运动只关心机器人末端执行器运动的起点和目标点位姿,不关心这两点之间的运动轨迹。
(2)连续路径运动(ContinuousPath,CP)CP运动不仅关心机器人末端执行器达到目标点的精度,而且必须保证机器人能沿所期望的轨迹在一定精度范围内重复运动。
工业机器人PTP运动和CP运动
机器人CP运动的实现是以点到点运动为基础,通过在相邻两点之间采用满足精度要求的直线或圆弧轨迹插补运算即可实现轨迹的连续化.机器人再现时主控制器(上位机从)存储器中逐点取出各示教点空间位姿坐标值,通过对其进行直线或圆弧或插补运算,生成相应路径规划,然后把各插补点的位姿坐标值通过运动学逆解运算转换成关节角度值,分送机器人各关节或关节控制器(下位机)。
3.3机器人的位置控制实现机器人的位置控制是工业机器人的基本控制任务。
关节控制器(下位机)是执行计算机,负责伺服电机的闭环控制及实现所有关节的动作协调。
工业机器人的位置控制
扩展与提高运动控制电机及驱动机器人的核心技术是运动控制技术,目前工业机器人采用的电气驱动主要有步进电动机和伺服电动机两类.1.步进电动机系统步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制精密驱动元件,分为反应式步进电机、永磁式步进电机和混合式步进电机三种,其中混合式步进电机的应用最为广泛,是一种精度高、控制简单、成本低廉的驱动方案。
步进电机与步进驱动器
2.伺服电动机系统伺服电机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电机轴上的角位移或角速度输出,可分为直流和交流伺服电机两大类。
特点:
当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降.优点:
①无电刷和换向器,工作可靠,对维护和保养要求低;
②定子绕组散热比较方便;
③惯量小,易于提高系统的快速性;
④适应于高速大力矩工作状态;
⑤同功率下有较小的体积和重量。
伺服电机与伺服驱动器
本章小结工业机器人的机械结构部分称为操作机。
通常用自由度、工作空间、额定负载、定位精度、重复定位精度和最大工作速度等技术指标来表征工业机器人操作机的性能.工业机器人通常由操作机、控制器和示教器三部分组成.操作机是机器人赖以完成各种作业的主体部分,一般由机械臂、驱动-传动装置以及内部传感器等组成。
控制器是完成机器人控制功能的结构实现,一般由控制计算机和伺服控制器组成。
示教器是机器人的人机交互接口,主要由显示屏和按键组成。
工业机器人的运动控制是指工业机器人的末端执行器从一点移动到另一点的过程中,常采用点位(PTP)控制和连续路径(CP)控制两种方式。
思考练习1、填空
(1)______通常作为机器人的技术指标,反映了机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示。
(2)工业机器人主要由________、_______和_______组成.下图中1表_______示;
2表示_______;
3表示_______和4表示_______。
题2图
(3)工业机器人的运动控制主要是实现_____和_____两种.当机器人进行______运动控制时,末端执行器既要保证运动的起点和目标点位姿,而且必须保证机器人能沿所期望的轨迹在一定精度范围内运动.(4)对给定的机器人操作机,己知各关节角矢量,求末端执行器相对于参考坐标系的位姿,称之为_____运动学.
2、选择
(1)操作机是工业机器人的机械主体,是用于完成各种作业的执行机构。
它主要哪几部分组成?
()①机械臂;
②驱动装置;
③传动单元;
④内部传感器A.①②B。
①②③C。
①③D.①②③④
(2)示教器也称示教编程器或示教盒,主要由液晶屏幕和操作按键组成,可由操作者手持移动.它是机器人的人机交互接口,试问以下哪些机器人操作可通过示教器来完成?
()。
①点动机器人;
②编写、测试和运行机器人程序;
③设定机器人参数;
④查阅机器人状态A。
①②B。
①②③C.①③D。
①②③④3、判断
(1)机器人手臂是连接机身和手腕的部分。
它是执行结构中的主要运动部件,主要用于改变手腕和末端执行器的空间位置,满足机器人的作业空间,并将各种载荷传递到机座.()
(2)除个别运动精度不高、重负载或有防爆要求的机器人采用液压、气压驱动外,工业机器人目前大多采用交流伺服电机驱动.()(3)工业机器人的腕部传动多采用RV减速器,臂部则采用谐波减速器。
()
12
 升级会员
升级会员 