迭前时间偏移处理软件Geodepth手册.docx
《迭前时间偏移处理软件Geodepth手册.docx》由会员分享,可在线阅读,更多相关《迭前时间偏移处理软件Geodepth手册.docx(17页珍藏版)》请在冰点文库上搜索。
迭前时间偏移处理软件Geodepth手册
叠前时间偏移处理软件实用指南,此指南仅以GeoDepth为例。
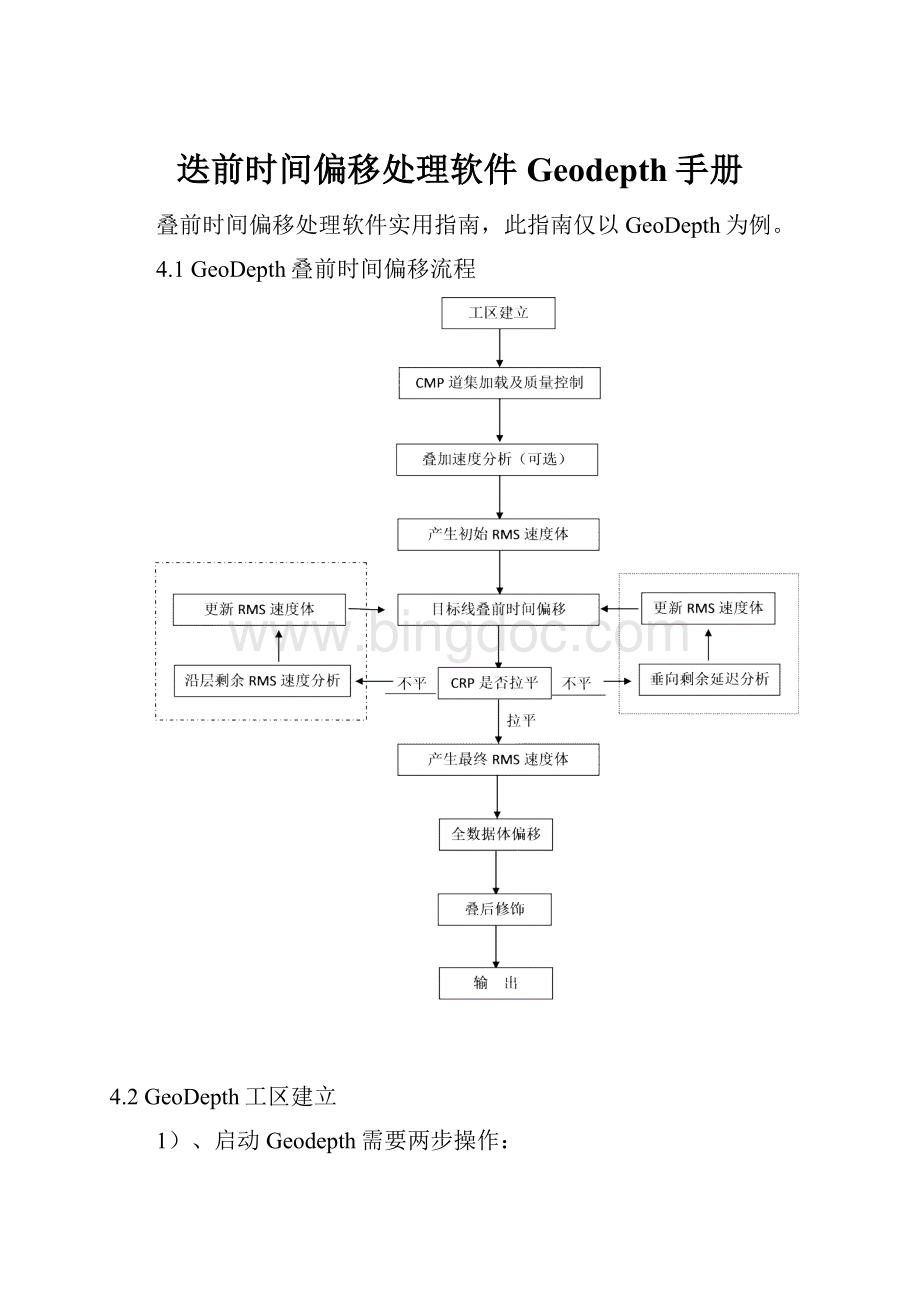
4.1GeoDepth叠前时间偏移流程
4.2GeoDepth工区建立
1)、启动Geodepth需要两步操作:
STEP1:
选择版本
在用户目录下,键入pgver,会有如下显示:
输入选择的版本号pg20。
STEP2:
键入pg2,启动Geodepth,界面如图4.1所示:
2)、工区产生
GEODEPTH工区建立有四步:
STEP1:
定义环境既$PG_SURVEY_DIR变量;
在GEODEPTH主界面→CUSTOMIZE→SETENVIROMENT,输入用户欲存放GEODEPTH工区库的目录名:
如图4.2所示:
STEP2:
产生工区名和定义工区参数
在Geodepth主界面下,选FILE→NEW给出2D或3D工区名称,以上定义后,在$PG_SURVEY_DIR目录下会产生project_name.HDS的文件,同时在该一级目录下会产生project_name.har目录,该目录将保存一些与文件交换有关的参数。
给出工区名后,系统会要求给出工区的参数,如图4.3所示。
注意:
1.SRD参数定义地震参考面,根据Geodepth的约定,SRD高于海平面的为负值,低于海平面的为正值。
2.Shotingdirection是INLINE方向与NORTH的夹角,顺时针为正,逆时针为负。
3.Azimuth方位角参数,当定义二维工区时,Azimuth为炮线(shotline)与北的夹角,顺时针为正,逆时针为负。
当定义三维工区时,Azimuth参数缺省为0。
4.X、Y的原点为第一条INLINE与第一条XLINE的交点坐标。
STEP3:
定义数据体参数
在STEP2之后,Geodepth会要求输入VolumeParameter,即定义深度体、速度体、梯度的参数。
如图4.4所示。
STEP4:
定义数据路径
同FOCUS一样,Geodepth的数据路径应该与同一工区的Focus数据路径一致,见图4.5,一旦定义了数据路径,在下一次启动Geodepth时,系统会自动寻找该数据路径,不需重新定义。
如果想修改数据路径,可以在任意时刻对数据路径进行修改,执行以下操作:
在Geodepth主界面下:
OPEN打开工区→CUSTOMIZE→DATAPATH输入新的数据路径或追加其他路径,系统会在该路径下产生SURVEY/project_name的目录。
4.3.数据加载及质量监控
4.3.1、Geodepth系统的数据加载分两种情况:
1)、独立的Geodepth工区
如果没有Focus数据库可以链接,数据的加载主要包括以下内容:
●加载CMP道集
●加载叠加数据、叠后偏移数据
●加载速度函数
●加载解释层位、井资料等(可选)
Geodepth系统可以很容易的加载叠前、叠后SEG-Y格式的地震数据。
叠前数据可以是CMP或SHOT记录,用户需要定义所加载数据的采样率、道长、INLINE(185字节)、XLINE(181字节)、SHOT-X、SHOT-Y、REC-X、REC-Y,如果有浮动基准面信息,需要定义静校正量或浮动基准面高程。
叠后数据一般以三维数据体的形式出现,用户需要定义所加载数据的采样率、道长、INLINE、XLINE,对于叠后数据一般不定义CMP-X、CMP-Y;另外,如果有浮动基准面信息,通过叠后数据加载,可以加载静校正量或浮动基准面高程。
其结果同叠前数据加载。
(SEG-Y格式加载见图4.6-a,图4.6-b,图4.6-c,图4.6-d)。
2)、从Focus工区建立的Geodepth工区
如果已有Focus工区,Geodepth系统可以与FOCUS5.0能够共享数据库,因此地震数据可以不必加载,但由于进行Kirchhoff偏移时需要CMP道集,要求数据库中必须存在一个CMP道集数据供Kirchhoff叠前偏移使用,如果考虑到浮动地表情况,要求该CMP数据与地表模型相吻合;另外,由于共享数据库,速度函数不需要加载,可以直接共享;
井资料和层位信息需要通过ASCIIImport/Export文本文件输入/输出工具进行加载。
4.3.2、加载数据的质量监控
数据加载成功后,打开主界面下的2D/3DGeometryView窗口做质量检查(图4.7),以确保所加载的地震数据是正确的。
检查内容包括:
①工区网格定义是否正确,②炮点位置,③检波点位置,④覆盖次数,⑤方位角,⑥Inline和Xline间距等。
另外,除根据2D/3DGeometryView窗口进行检查外,还应该打开Geostack窗口对CMP道集进行随机显示检查。
4.4、时间速度模型建立
叠前时间偏移是在时间域完成的,其主要工作是建立合理的时间速度模型——RMS速度模型。
Geodepth系统提供了两种RMS速度模型的建立方法:
基于层位的RMS速度修改和基于垂向延迟的RMS速度修改。
基于垂向延迟的RMS速度修改方法和基于层位的RMS速度修改原理上基本一致,基于垂向延迟的RMS速度修改方法重点是求取剩余RMS延迟,系统自动求取出修改后的RMS速度;而基于层位的层速度修改方法重点是求取剩余RMS速度,通过手工完成RMS速度修改。
4.4.1初始RMS速度求取
无构造模型时,Geodepth提供了三种得到初始RMS速度的方法(基于构造模型的初始RMS速度求取请参见Geodepth相关手册):
①通过Geostack叠加速度分析
Geostack是Geodepth主要的功能模块之一,它的主要功能是:
拾取切除、进行叠加速度分析、剩余叠加速度分析、剩余RMS速度分析和剩余层速度分析、产生速度体、动校正及叠加等(图4.8)。
分析得到的叠加速度可以产生RMS速度体。
②外部加载垂直函数
通过ASCIIImport/Export模块可以将外部的速度函数文件加载到Geodepth系统内,目前,Geodepth提供了四种文本格式:
HANDVEL(FOCUS内部格式)、WESTERN、PROMAX和用户定义格式。
外部文件加载进来之后,通过Geostack或VerticalFunction模块对速度函数检查,并产生RMS速度体。
③Focus内部速度函数输入
Geodepth和Focus能够共享数据库,Focus通过速度分析得到的速度文件Geodepth可以完全应用。
首先,在建立Geodepth工区时,正确指定链接的Focus工区,实现工区共享;然后在VerticalFunction的File选项下,选择ImportfromFocus,然后选择速度文件名,Apply即把Focus的速度文件输入到Geodepth,产生速度体的过程同上。
4.4.2RMS速度的修改
利用初始RMS速度模型进行目标线的叠前时间偏移(方法及参数等见后一章节--叠前时间偏移)之后,产生了两个数据体:
偏移叠加数据体和时间偏移的CRP道集数据体,RMS速度的修改就是根据偏移后CRP道集,通过沿层和垂向的剩余RMS速度分析,产生新的RMS速度,利用新的RMS速度产生新的RMS速度体。
GeoDepth提供了两种RMS速度修改方法,即:
基于层位的RMS速度修改和基于垂向的RMS速度修改。
基于层位的RMS速度修改
利用得到的叠前时间偏移CRP道集和沿层的时间偏移构造模型,就可以进行基于层位RMS速度修改:
首先,在MAP中抽取沿层的RMS速度,网格化,并形成RMS速度的3DMODEL;
第二步,在VELOCITYNAVIGATOR中计算沿层的剩余RMS速度,并拾取剩余RMS速度;在MAP中对拾取的剩余RMS速度进行网格化,形成剩余RMS速度的3DMAP;
第三步,在MAP中对RMS速度进行运算,形成新的RMS速度MAP;其公式是:
新的RMS速度MAP=老的RMS速度MAP+剩余RMS速度的MAP。
在MAP窗口中选择:
Options>GridManipulations>byFunction.
第四步,形成修改后的RMS速度体。
再次进行叠前时间偏移,重复以上步骤,直到剩余RMS速度很小为止。
基于垂向延迟的RMS速度修改
首先,在主界面上选择Geostack模块,输入任意一条叠前时间偏移的目标线,选择右下角的功能选项为TimeMigratedMoveoutAnalysis即剩余RMS速度分析。
计算剩余RMS延迟,在options下选calculatesemblance→createverticalsemblance(垂向剩余延迟),定义主测线范围和CMP点的范围。
拾取垂向剩余延迟,完成计算剩余RMS延迟之后,当前测线的第一个CMP点会自动出现在Geostack窗口下。
如果速度大于理论速度,则过偏移,延迟量为正,在CRP道集上同相轴下拉,否则为负,欠偏移,延迟量为负,同相轴上翘。
CRP道集的同相轴,拾取该点的垂向剩余延迟之后,系统会自动计算出该点的新的RMS速度(update),依次类推,拾取所有目标线的垂向剩余延迟后,选择以update为类型的垂直速度函数产生新的RMS速度体,即完成了第一次迭代,可以用该速度进行下一轮的迭代。
直到延迟量集中在零值附近为止。
4.5最终叠前时间偏移
当经过几次迭代,得到最终的均方根速度模型之后,可以做最终的叠前时间偏移。
最终偏移前应提供以下测试:
1、旅行时计算方法测试,明确最佳旅行时算法;
2、偏移孔径测试,确定使浅、中、深最佳成像的偏移孔径;
3、拉伸滤波参数;
4、去假频参数;
一般地,最终偏移时偏移孔径可以适当加大。
最终的偏移结束后,可以做垂向深度延迟分析,产生深度延迟数据体,做剩余叠加;也可以选取切除线,做叠加,得到最终结果;还可根据需要进行叠后修饰处理。
GeoDepth叠前时间偏移采用Kirchhoff积分法,具有直射线和弯曲射线两种成像方法,提供了拉伸滤波和去假频功能。
能够支持联络线方向的数据体输出。
影响偏移效果的参数主要有:
:
孔径参数,GeoDepth分别沿INLINE和CROSSLINE两个方向定义偏移孔径,在这里偏移孔径指的是直径,以道为单位,通常(偏移孔径X道距/2)即为偏移半径。
另外,GeoDepth要求用户给出偏移孔径100%应用的起始时间T:
0-T之间孔径线形插值,T-最大时间之间,采用定义的偏移孔径,这样,用户可以方便的定义偏移孔径。
:
弯曲射线,该参数提供了针对大倾角、大孔径偏移时进行弯曲射线追踪的功能;缺省为直射线。
一般建议在速度模型迭代过程可以采用直射线偏移,在最终偏移时采用弯曲射线,该方法保证大倾角地层和断层等清晰成像。
:
拉伸滤波,GeoDepth定义拉伸滤波采用:
不用、弱、中、强四种方式进行拉伸滤波,如果倾角较陡,拉伸切除不要太大,如果倾角较小,拉伸切除可以稍强,用户根据资料情况可以选择使用。
。
:
去假频,GeoDepth有两种去假频方法:
精确三角插值滤波和频率域滤波。
每种方法提供了:
不用、弱、中、强四种方式。
其中精确三角插值滤波具有较好的去假频效果。
:
输出数据的偏移距范围,GeoDepth自动根据数据的偏移距最大、最小范围定义输出数据的偏移距范围:
(最大偏移距-最小偏移距)/FOLD=偏移距增量,其中FOLD=30。
一般要求用户根据资料情况定义最小偏移距、最大偏移距和偏移距增量。
叠前时间偏移的输出包括:
CRP道集体、均方根速度体及叠加后的叠前时间偏移剖面。
 升级会员
升级会员 