控制系统数字仿真.docx
《控制系统数字仿真.docx》由会员分享,可在线阅读,更多相关《控制系统数字仿真.docx(13页珍藏版)》请在冰点文库上搜索。
控制系统数字仿真
现代工程控制理论
实验报告
实验名称:
控制系统数字仿真技术
实验时间:
2015/5/3
一、实验目的
1、探究多阶系统状态空间方程的求解;
2、探究多种控制系统数字仿真方法并对之进行精度比较;
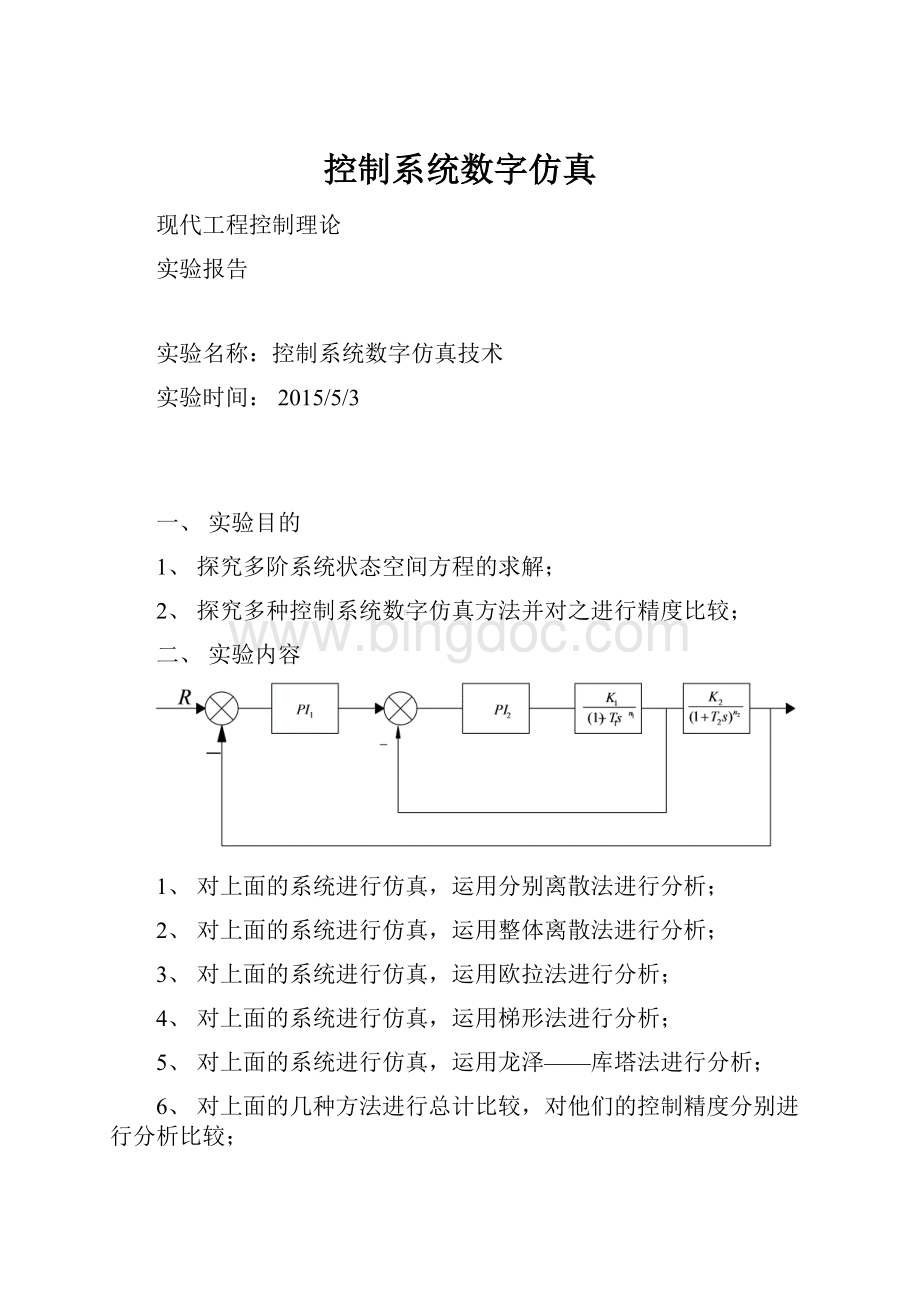
二、实验内容
1、对上面的系统进行仿真,运用分别离散法进行分析;
2、对上面的系统进行仿真,运用整体离散法进行分析;
3、对上面的系统进行仿真,运用欧拉法进行分析;
4、对上面的系统进行仿真,运用梯形法进行分析;
5、对上面的系统进行仿真,运用龙泽——库塔法进行分析;
6、对上面的几种方法进行总计比较,对他们的控制精度分别进行分析比较;
三、实验原理
1、控制系统状态空间方程整体离散法的求解;
控制系统的传递函数一般为
有两种控制框图简化形式如下:
KI控制器可以用框图表示如下:
惯性环节表示如下:
高阶系统
的框图如下
对于上面的框图可以简写传递函数
根据各环节间的关系可以列写出式子中出现的系数A、B、C和D,下面进行整体离散法求传递函数的推导
这样,如果知道系数,就可以知道高阶系统的传递函数和状态空间方程。
2、在控制系统的每一个环节都加一个采样开关,构成分别离散法求解系统的状态空间方程;
采样开关其实是一个零阶保持器
比例环节:
积分环节:
惯性环节:
四、实验方案
1、分别离散法;
系统框图
根据上面提到的分别离散法得到仿真的公式
已知系数:
K1=;
K2=;
T1=;
T2=;
n1=2;
n2=4;
kp1=;
ki1=;
kp2=2;
ki2=;
惯性环节的系数:
fai1=exp(-dt/T1);
faiM1=1-fai1;
fai2=exp(-dt/T2);
faiM2=1-fai2;
PID控制环节:
up1=e*kp1;
x
(1)=x
(1)+ki1*dt*e;
up2=e1*kp2;
x
(2)=x
(2)+ki2*dt*e1;
惯性环节:
x(3)=fai1*x(3)+K1*faiM1*u1;
x(4)=fai1*x(4)+faiM1*x(3);
x(5)=fai2*x(5)+K2*faiM2*x(4);
x(6)=fai2*x(6)+faiM2*x(5);
x(7)=fai2*x(7)+faiM2*x(6);
x(8)=fai2*x(8)+faiM2*x(7);
2、整体离散法;
将系统框图拆开
系统的状态空间方程为:
可以得到此时状态方程的系数
由上面的推导可知
求出
就可以得到系统的状态空间方程
在Matlab中仿真时为
fori=1:
n1*n2
faiM=faiM+(dt^i)*(a^(i-1))/factorial(i);
end
fai=faiM*a+eye(n1*n2);
faiM=faiM*b;
forj=1:
lp
x=fai*x+faiM*r;
y=c*x+d*r;
y1=[y1y];
t=[tj*dt];
end
3、欧拉法
由上面已经求出系统的状态空间方程,所以这里直接引用,欧拉法的求解过程如下:
在Matlab中的仿真程序如下:
fori=1:
lp
xk=a*x+b*r;
x=x+xk*dt;
y=c*x+d*r;
y1=[y1y];
t=[tdt*i];
end
4、梯形法
类似于欧拉法,梯形法的推导如下
在Matlab中仿真的程序如下:
fori=1:
lp
xk=a*x+b*r;
xk1=x+dt*xk;
xk2=a*xk1+b*r;
E=(xk+xk2)/2;
x=x+dt*E;
y=c*x+d*r;
y1=[y1y];
t=[tdt*i];
end
5、龙格——库塔法
推导如下:
在Matlab中的仿真程序如下:
fori=1:
lp
e1=a*x+b*r;
xk1=x+dt*e1/2;
e2=a*xk1+b*r;
xk2=x+dt*e2/2;
e3=a*xk2+b*r;
xk3=x+dt*e3/2;
e4=a*xk3+b*r;
E=(e1+e2+e3+e4)/6;
x=x+dt*E;
y=c*x+d*r;
y1=[y1y];
t=[tdt*i];
end
五、实验结论
5种方法仿真图形
放大后的图像
此时,可以看出,分别离散已经开始远离其他的线
继续放大
此时分别离散已经明显远离其他,并且欧拉法也开始远离其他的线
最终可以看出,龙格——库塔法与整体离散法得到的仿真曲线最接近。
小结:
利用不同的方法对多阶系统的状态方程进行求解,分别离散法,因为零阶保持器的缘故,所以误差比较大;欧拉法通过简单的取切线的端点作为下一步的起点,提升了精确性,但是本身也存在缺点,当步数增加时,误差在逐渐累积;
详细实例见附件;梯形法是欧拉法的升级版,首先可以由欧拉法求得下一时刻的值,再代入校正得到一个更精准的值,这样,可以较欧拉法得到更精准的值;龙格库塔法是至尊版,比梯形法更精准,运用不同阶数的龙格库塔法可以得到更精准的值,他运用不同预估值的斜率求取平均值,并赋予不同的权重,提高精度;
六、实验中存在的问题
没有明显的问题
 升级会员
升级会员 