2加权平均融合方法docx.docx
《2加权平均融合方法docx.docx》由会员分享,可在线阅读,更多相关《2加权平均融合方法docx.docx(8页珍藏版)》请在冰点文库上搜索。
2加权平均融合方法docx
2加权平均融合方法
2.1加权融合的一般结构
2.2最优加权融合2.3自适应最优加权融合及应用
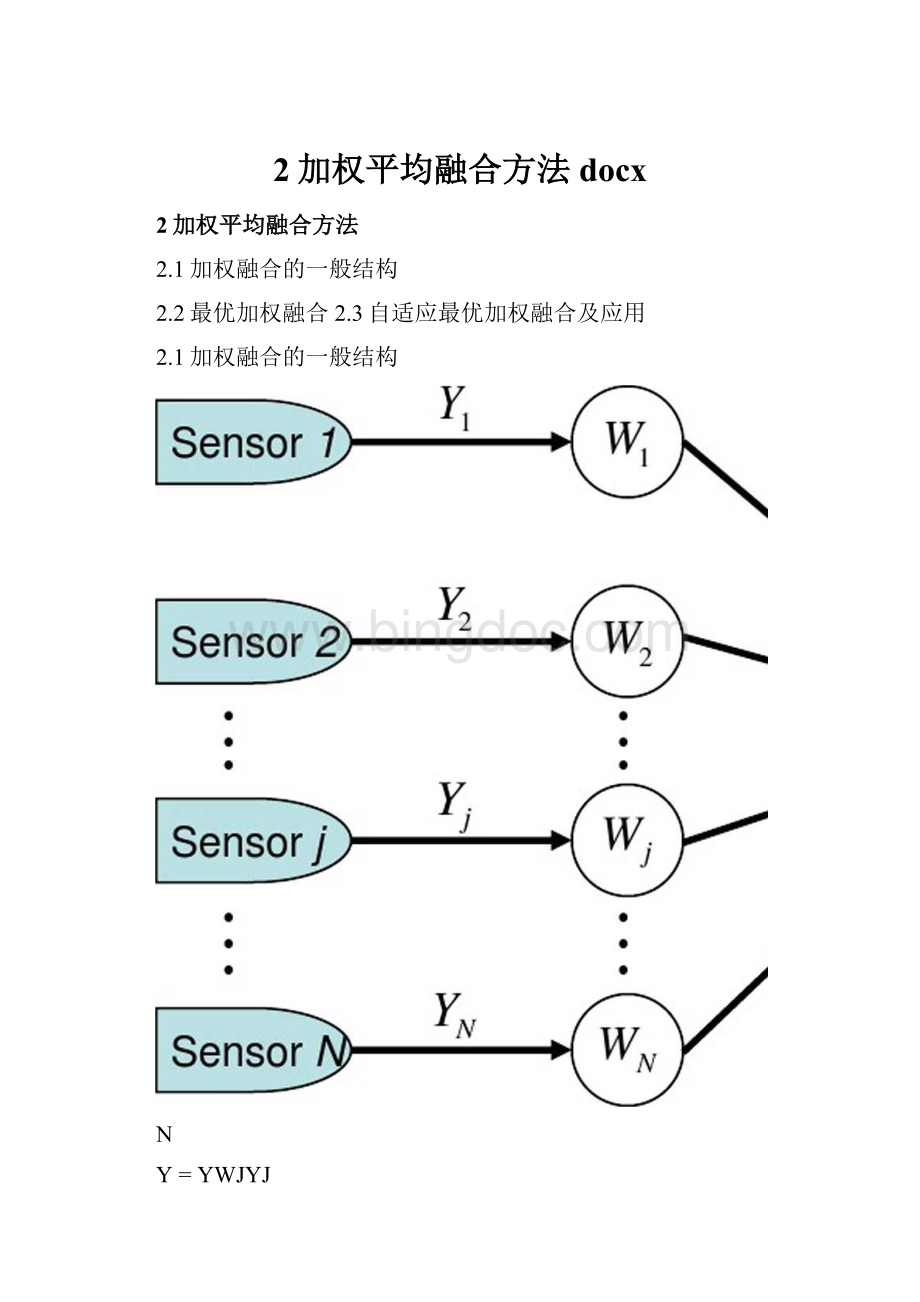
2.1加权融合的一般结构
N
Y=YWJYJ
7=1
假设用N个传感器观测一个未知量Y,传感器的观测分别为{Yj}(j=1,2,…,N)。
第丿•个传感器的观测可表述为
勺⑴表示叠加在真实信号丫⑴上的白噪声,rij(r)的方差定义为er;=E\n^(t)\,£[•]表示数学期望。
如果观测是无偏、且相互独立的,则对y的估计可表示为
N
其中叱为加权系数,并且^Wj=1O
估计方差为
(3)
其中CT2为第j个传感器的噪声方差。
jJ
如果所有观测的加权相同,即W=1/N^贝U(3)式的估计方差
J
(4)
尽管这种平均加权在实际应用被广泛使用,但它不是最小方差估计。
为求使得⑶式中方差贵最小的w.,构造辅助函数
J
2)=工;严;叭+期工二叫-1)
式⑶在条件工:
鸭=1下的最小值问题归结为如下条件极值
J"
问题:
cj——2W|CFj2+2=0dWx
&=+2=0dW2-一
厂…即:
"=2Cy+2=0
yNwt.-i=o
厶J=1J
%+“2+…・+“N=1
由上式得
"]+%+•••+%=〃(4+4+...+丄)
CT]a2bN
即
从而
〃=
WJ=
将此结果烬忙右,J=l,.
J
1
\N1
遗憾的是方差并不知道?
…,N,即得
j"…,N
从以上分析可以看出,最优加权因子W.由各个传感器的方差
J
代决定,但贵一般不是已知的。
可根据各传感器所提供的
丿J
测量值,依据相应算法将它们求出。
所对应的观测误差分别为“n.、即
J
Y的互相关系数满足
J
^.=£[^.]=£[72](6)
Y的自相关系数R满足
JJJ
心二(7)
将式(7)减去式⑹得
⑻
对于R、R的求取,可由其时间域估计值得出。
Jjij
设传感器测量数据个数为k,7?
的时间域估计值为R.閃、
JJJJ
Rh的时间域估计值为R.伙),贝U
1k
Km=l
1「口
工匕5)匕5)+约⑹岭⑹丘m=i
k-11
二〒心伙-1)+严⑹匕⑹
同理
(11)
(12)
如用传感器迫H川=1,2,…,N)与传感器丿做相关运算,贝U
可以得到Ry閃Q丰J;1=1.2,•N)的值。
为降低误差,取®伙)的均值
心伙)=
i=2j
结合(8)式,有
b(k)=Rjjg-Rj閃
仿真实验
(1)
用三组互不相关的零均值白噪声数据来模拟三个传感器的观测误差。
取真值为1,先取三组白噪声的方差分别为0.05.0.10.
0.30,将真值与白噪声数据依次相加,即可模拟出三组传感
器的测量数据。
按照自适应加权融合估计算法对三个传感器测量数据做融合估计,得到融合后的曲线。
并与直接对三个传感器做平均值估计算法的曲线做对比。
1.3
050100150200250
融合次数
1).8
1O.
f认jyx方差为005的传感器的权值
方差为(U的传感器的权値
方差为0・3的传感器的权值
010()20()300400500
融合次数
仿真实验
(2)
融合算法的抗干扰能力测试
仍然用三组互不相关的零均值白噪声数据来模拟三个传感器的观测误差。
取真值为1,三组白噪声的方差分别为0.05.0.10.2(模拟故障传感器的输出),同上将真值与白噪声数据依次相加,即可模拟出三组传感器的测量数据o
平扬加叔融仝曲线
50100150200250
融合次数
飞H]l„i1L1
si
自适应最优加权融合实例
波束合成和自适应波束合成
In
Pow&r
 升级会员
升级会员 