第8章SIMULINK交互式仿真.docx
《第8章SIMULINK交互式仿真.docx》由会员分享,可在线阅读,更多相关《第8章SIMULINK交互式仿真.docx(15页珍藏版)》请在冰点文库上搜索。
第8章SIMULINK交互式仿真
第八章SIMULINK交互式仿真
集成环境
.1引导
.1.1使用入门
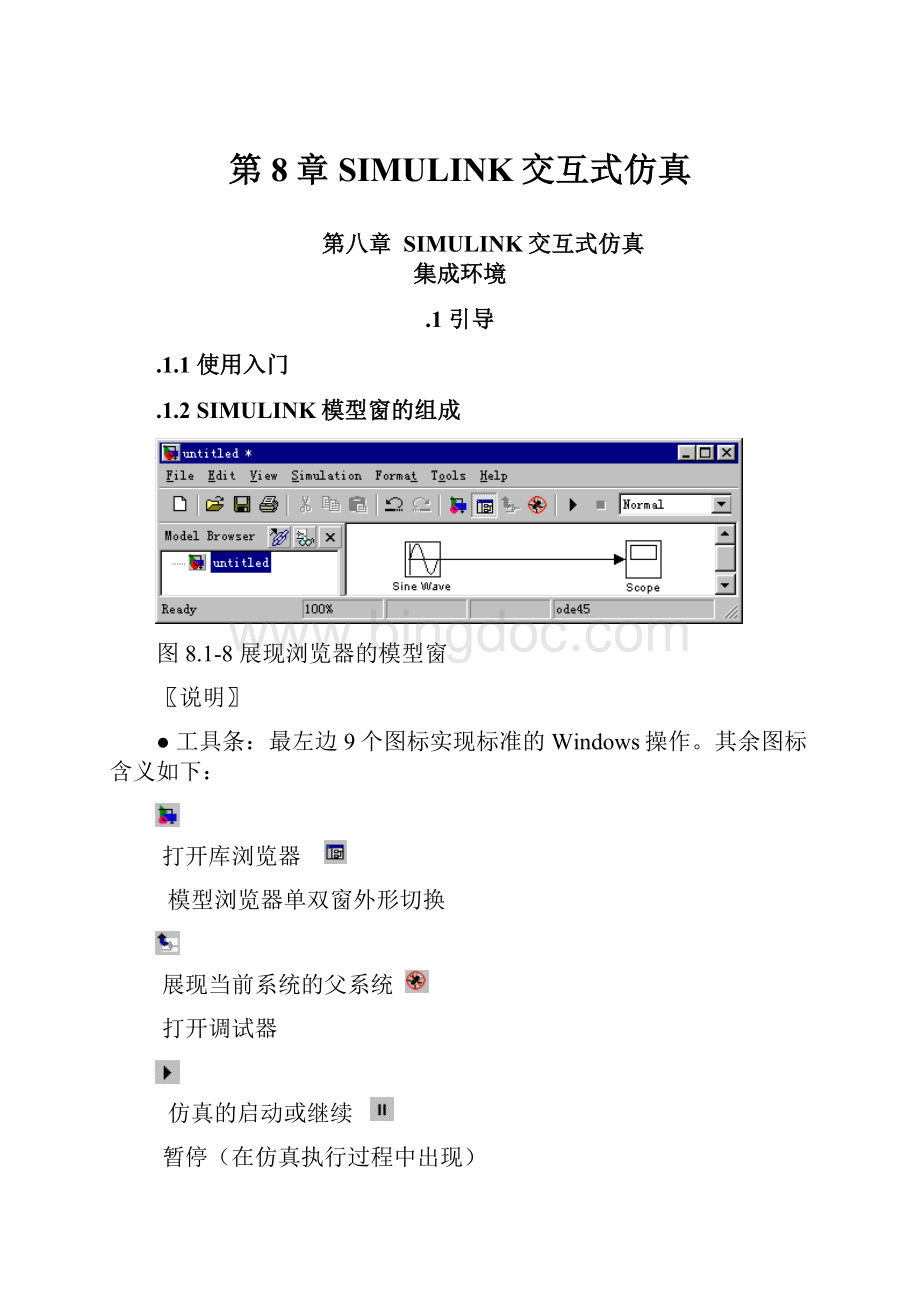
.1.2SIMULINK模型窗的组成
图8.1-8展现浏览器的模型窗
〖说明〗
●工具条:
最左边9个图标实现标准的Windows操作。
其余图标含义如下:
打开库浏览器
模型浏览器单双窗外形切换
展现当前系统的父系统
打开调试器
仿真的启动或继续
暂停(在仿真执行过程中出现)
结束仿真
显示库连接
观察封装子系统
.2模型的创建
.2.1模型概念和文件操作
10一SIMULINK模型是什么
10二模型文件的操作
.2.2模块操作
.2.3信号线操作
10一产生连线
10二信号线的分支和折曲
10三插入模块
10四信号线标识(label)
.2.4对模型的注释
.2.5常用的Sourse库信源
【例8.2-1】如何调用MATLAB工作空间中的信号矩阵作为模型输入。
本例所需的输入为
。
(1)编写一个产生信号矩阵的M函数文件
functionTU=source82_1(T0,N0,K)
t=linspace(0,K*T0,K*N0+1);
N=length(t);
u1=t(1:
(N0+1)).^2;
u2=(t((N0+2):
(2*N0+1))-2*T0).^2;
u3(1:
(N-(2*N0+2)+1))=0;
u=[u1,u2,u3];
TU=[t',u'];
(2)构造简单的接收信号用的实验模型
图8.2-8接收信号用的实验模型
(3)模块的参数设置
(4)在指令窗中,运行以下指令,在MATLAB工作空间中产生TU信号矩阵。
TU=source82_1(1,100,4);
(5)选中exm082_1s.mdl模型窗菜单【Simulation:
Start】,示波器呈现图8.2-8右图信号。
.2.6常用的Sink库信宿
10一库信宿一览表
10二示波器
.2.7仿真的配置
10一解算器(Solver)参数的设置
10二仿真数据的输入输出设置(WorkspaceI/O)
.3连续系统建模
.3.1线性系统
10一积分模块的功用
【例8.3-1】复位积分器的功用示例。
(见图8.3-1)
图8.3-1仿真模型exm083_1s.mdl与运行结果
操作步骤:
(1)构作如图8.3-1左图所示的系统
(2)仿真操作
(3)仿真结果说明
10二积分模块直接构造微分方程求解模型
【例8.3-2】假设从实际自然界(力学、电学、生态等)或社会中,抽象出初始状态为0的二阶微分方程
,
是单位阶跃函数。
本例演示如何用积分器直接构搭求解该微分方程的模型。
(1)改写微分方程
(2)利用SIMULINK库中的标准模块构作模型exm083_2s.mdl
图8.3-2求解微分方程的SIMULINK模型
(3)仿真操作
(4)保存在MATLAB工作空间中的数据
clf
tt=ScopeData.time;%为书写简单,把构架域的时间数据另赋给tt
xx=ScopeData.signals.values;%目的同上。
[xm,km]=max(xx);
plot(tt,xx,'r','LineWidth',4),holdon
plot(tt(km),xm,'b.','MarkerSize',36),holdoff
strmax=char('最大值',['t=',num2str(tt(km))],['x=',num2str(xm)]);
text(6.5,xm,strmax),xlabel('t'),ylabel('x')
图8.3-3利用存放在MATLAB工作空间中的仿真数据所绘制的曲线
10三传递函数模块
【例8.3-3】直接利用传递函数模块求解方程(8.3-1)。
(1)根据式(8.3-3)构造如图8.3-4所示的模型exm083_3s.mdl
图8.3-4由传递函数模块构成的仿真模型exm083_3s.mdl
(2)仿真操作
10四状态方程模块和单位脉冲输入的生成
【例8.3-4】假设式(8.3-4)中的输入函数
是单位脉冲函数
,研究该系统的位移变化。
本例演示:
(A)状态方程模块的使用;(B)脉冲函数的生成方法。
(1)单位脉冲函数的数学含义及近似实现
(2)利用库模块构造如图8.3-5所示的仿真模型exm083_4s.mdl
图8.3-5带近似单位脉冲的状态方程模块构成的仿真模型
(3)仿真结果
图8.3-6系统在脉冲激励下的仿真结果
.3.2非线性系统
10一建立非线性仿真模型的基本考虑
【例8.3-5】物理背景:
如图8.3-7所示喷射动力车的定位控制问题。
图8.3-7装置左右喷射发动机的车辆示意图
要求设计一个控制器,其目标是:
当车辆的位移和速度为正时,控制器点燃右发动机;当车辆的位移和速度为负时,控制器点燃左发动机,直至车辆静止在坐标原点。
(1)根据车辆的动态方程,构作基本仿真模型
图8.3-8基本仿真模型
(2)为观察仿真时间进程,引入仿真时钟显示。
(3)为模仿“车辆速度与位移小于某阈值时被认为控制目标达到”,引入仿真终止环节。
图8.3-9完整仿真模型exm083_5s.mdl
(4)为模仿“符号切换的非瞬时性”,本例采用“定步长”Solver解算器
(5)为便于分析接近原点时的颤振现象,通过模型窗I/O设置保存仿真数据
(6)仿真操作和仿真结果观察
(7)保存数据的利用和分析
subplot(1,2,1),plot(xout(:
1),xout(:
2))
gridon,axis([-0.2,1,-1,0.2]),axissquare
xlabel('\fontsize{14}位移'),ylabel('\fontsize{14}速度'),
subplot(1,2,2),plot(xout(:
1),xout(:
2))
gridon,axis([-0.1,0.05,-0.05,0.1]),axissquare
图8.3-10完整相轨迹及局部放大图
10二任意非线性函数模块及其应用
【例8.3-6】轿车沿直线山坡路向前行驶。
要求设计一个简单的比例放大器,使轿车能以指定的速度运动。
本例演示:
(A)仿真系统的创建;(B)非线性模块的使用;(C)任意函数模块的应用。
(1)轿车的运动方程
图8.3-11坡路上行驶轿车的受力示意
(2)轿车动力学的仿真模型(图8.3-12)
图8.3-12行驶轿车动力学仿真模型exm083_6_2s.mdl
(3)比例控制及其仿真模型
图8.3-13比例控制器仿真模型exm083_6_3s.mdl
(4)构成完整的仿真模型
图8.3-14受控轿车的完整仿真模型exm083_6_4s.mdl
(5)仿真操作和说明
.4封装子系统的创建及受控执行
.4.1简装子系统及其应用
10一创建简装子系统的“先有内容后套包装”法
【例8.4-1】题目的背景和参数与例8.3-6完全相同,要求创建利用比例控制器使轿车的运动速度稳定在期望车速的分层仿真模型。
为进行本例,假设图8.3-14所示模型已被保存为exm084_1_0s.mdl文件。
本例演示:
如何从非分层模型exm084_1_0s.mdl获得分层模型;创建简装子系统的“先有内容后套包装”法。
(1)将待“包装”模型另存为一个新模型
(2)生成第一个简装子系统
(3)生成第二个简装子系统
(4)更改子系统的标识名
(5)重命名输入输出口的名称
图8.4-1采用简装子系统的完整仿真模型exm084_1_1s.mdl
10二创建简装子系统的“先有包装后置内容”法
【例8.4-2】本例演示:
如何自上而下构造分层模型;产生简装子系统的“先有包装后置内容”法。
(1)在新建模型窗中复制包括子系统模块在内的所有标准模块(见图8.4-2)
图8.4-2带标准子系统模块的新建模型窗
(2)在Subsystem标准模块中“装入”轿车动态模型
(3)在Subsystem1标准模块中“装入”比例控制器模型
(4)各模块间的连接
(5)对完整仿真模型窗进行仿真参数设置,为进行仿真作最后准备
.4.2条件执行子系统
10一使能子系统
【例8.4-3】利用使能原理构成一个半波整流器。
本例演示使能子系统的创建及工作机理。
(1)打开SIMULINK的新建模型窗口
(2)从SIMULINK库中提取三个模块Sinewave、Subsystem、Scope到新建窗。
然后进行文件保存操作,并起文件名为exm084_3s(这保存操作只为以后调用方便,并非必要)。
(3)双击空子系统模块Subsystem,打开其结构模型窗。
(4)从SIMULINK库中拷贝In输入口模块、Out输出口模块、Enable使能模块到子系统的结构模型窗;把In模块的输出直接送到Out模块的输入端;Enable模块无须进行任何连接,且本例采用它的缺省设置;便实现了题目所需使能子系统(图8.4-3b)。
(5)按图8.4-3a那样,完成exm084_3s窗口中各模块间的连接。
(6)双击示波器模块,打开显示窗。
然后选择exm084_3s窗口菜单项【Simulation:
Start】,就可看到如图8.4-4的半波整流后的波形。
图8.4-3利用使能子系统实现半波整流的仿真模型exm084_3s.mdl
图8.4-4模型exm084_3s所得仿真波形
10二触发子系统
【例8.4-4】利用触发子系统获得零阶保持的采样信号。
本例演示:
触发子系统工作原理;在MATLAB指令窗中运行SIMULINK模型。
(1)构造如图8.4-5所示的仿真模型exm084_4s.mdl
图8.4-5利用触发子系统实现零保持采样的仿真模型exm84_4
(2)在MATLAB指令窗中运行SIMULINK模型
[t,x,y]=sim('exm084_4s',10);
clf,holdon
plot(t,y(:
1),'b')
stairs(t,y(:
2),'r')
stairs(t,y(:
3),'c:
'),holdoff
axis([010-1.11.1]),boxon
legend('sinewave','output','trigger',4)
图8.4-6exm084_4s.mdl模型仿真运行结果
.5离散时间系统和混合系统
.5.1若干基本模块
.5.2多速率离散时间系统
【例8.5-1】在离散控制系统中,控制器的更新频率一般低于对象本身的工作频率。
而显示系统的更新频率总比显示器的可读速度低得多。
假设有某过程的离散状态方程
式中
是输入。
该过程的采样周期为
秒。
控制器应用采样周期为
秒的比例控制器;显示系统的更新周期为
秒。
(1)建立模型exm085_1s.mdl(见图8.5-1)
图8.5-1经着色的多速率离散系统exm085_1s.mdl
(2)在exm085_1s模型窗中,选取菜单项【Format:
Sampletimecolors】后,模型中不同采样周期的模块和连线就会以不同颜色表示。
在本例中,采样速度最快的被控过程部分显示为红色;速度次之的控制器部分显示为绿色;显示x1历史记录的那部分显示为兰色。
(3)仿真结果
tt=TX.time;
x1=TX.signals.values;
plot(tt,x1),gridon,
xlabel('kT'),ylabel('x1(kT)')
图8.5-2
的历史记录
.6用MATLAB指令运行SIMULINK模型
习题8
 升级会员
升级会员 