图形学教案ch403pptConvertorWord文件下载.docx
《图形学教案ch403pptConvertorWord文件下载.docx》由会员分享,可在线阅读,更多相关《图形学教案ch403pptConvertorWord文件下载.docx(16页珍藏版)》请在冰点文库上搜索。
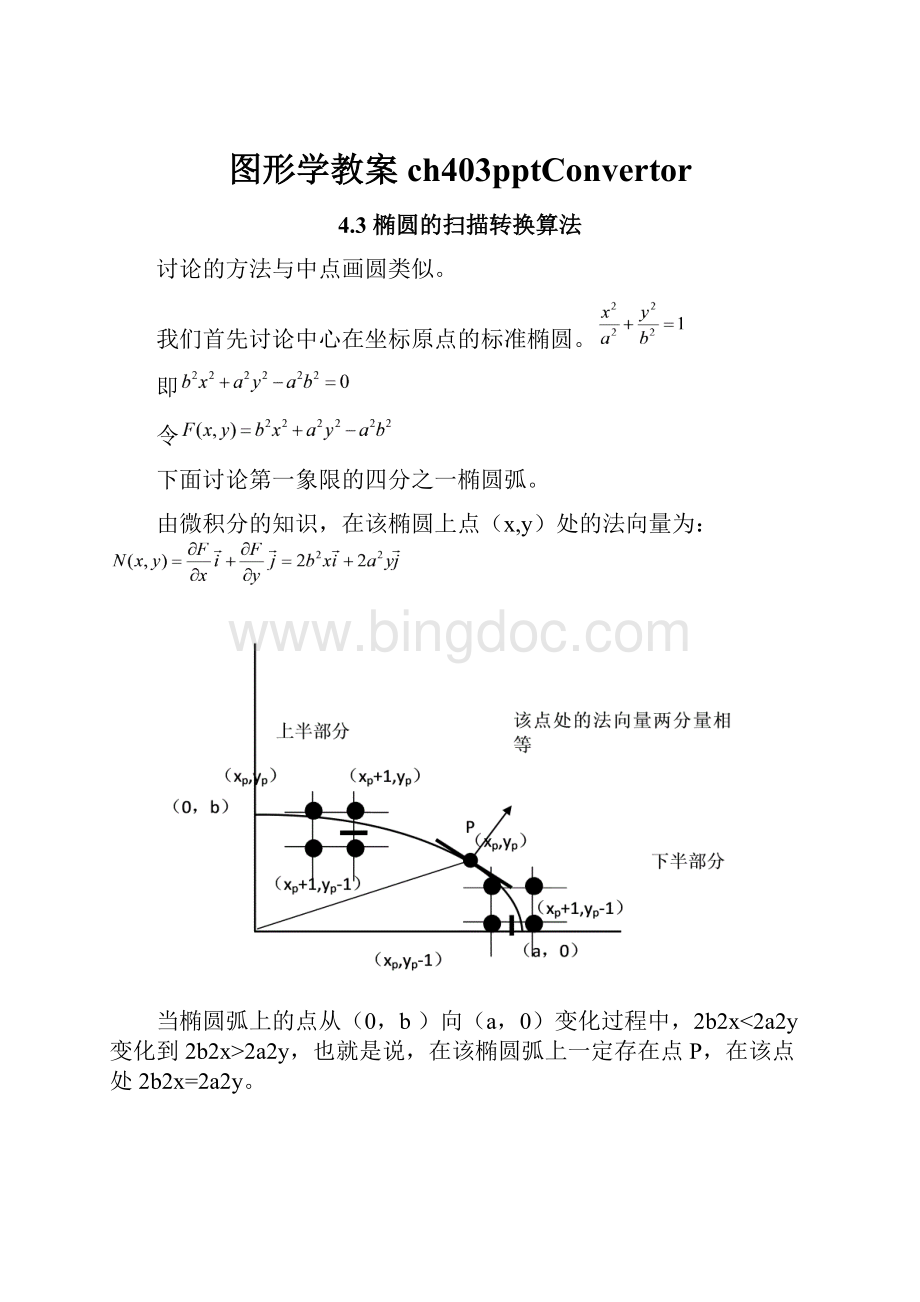
下面来求d2的初值。
显然,d2的初值出现在由上半椭圆弧转入下半椭圆弧的时候。
下半椭圆弧的第一个象素就是上半椭圆弧的最后一个象素。
设在上半椭圆弧的最后一个象素是(xp,yp),那么d2的初值为
midpointellipse(a,b,c)
inta,b,c;
{
intx,y;
floatd1,d2;
x=0;
y=b;
d1=b*b+a*a*(-b+0.25);
putpixel(x,y,c);
while(b*b*(x+1)<
a*a*(y-0.5))
if(d1<
0)
{d1+=b*b*(2*x+3);
x++;
}
else{
d1+=b*b*(2*x+3)+a*a*(-2*y+2);
y--;
putpixel(x,y,c);
}/*上半椭圆结束*/
d2=b*b*(x+0.5)*(x+0.5)+a*a*(y-1)*(y-1)-a*a*b*b;
while(y>
if(d2<
{
d1+=b*b*(2*x+2)+a*a*(-2*y+3);
d2+=a*a*(-2*y+3);
y--;
}
有对称性,不难得出中心在原点的整个椭圆的算法:
putpixel(x,-y,c);
putpixel(-x,y,c);
putpixel(-x,-y,c);
由平移变换,立即得到中心在任意位置(xr,yr)的椭圆的算法:
midpointellipse(xr,yr,a,b,c)
intxr,yr,a,b,c;
putpixel(x+xr,y+yr,c);
putpixel(x+xr,-y+yr,c);
putpixel(-x+xr,y+yr,c);
putpixel(-x+xr,-y+yr,c);
由平移变换,立即得到中心在任意位置(xr,yr)的椭圆的算法。
d2+=b*b*(2*x+2)+a*a*(-2*y+3);
主函数如下:
#include<
graphics.h>
math.h>
main()
intgdriver=DETECT,gmode;
initgraph(&
gdriver,&
gmode,””);
midpointellipse(150,150,50,40,15);
4.4区域填充
区域填充的方法主要有:
(多边形域的)扫描线填充算法、(多边形域的)边填充算法、区域的递归填充算法(简单的种子填充算法)、区域的扫描线填充算法(改进的种子填充算法)。
4.4.1区域的递归填充算法(简单的种子填充算法)
和递归填充算法相关的两种区域的表示:
内点表示:
区域内的所有像素着同一颜色,而区域外的所有像素具有另外的颜色;
边界表示:
区域边界上的所有像素点具有特定的颜色(可以是填充色),在区域内的所有像素均不能具有这一特定色,而且边界外的像素不能具有与边界相同的颜色。
边界表示的区域的递归填充算法的思想
在给出区域光栅化后的边界位置及边界颜色代码boundary_color后,现在要从多边形内部某一象素(x,y)开始按一定的填充方法对多边形进行填充。
该象素称为种子点。
要求填充的颜色为fill_color。
内点表示的区域的递归填充算法的思想
在给出区域光栅化后的内点的颜色代码oldcolor后,现在要从多边形内部某一象素(x,y)开始按某一种填充方法对多边形进行填充。
要求填充的颜色为newcolor。
两种填充方式
四邻法:
已知象素是区域内的一点,据此向上、下、左、右4个方向测试、填色、扩散。
四邻法
八邻法
八邻法:
已知象素是区域内的一点,据此周围8个方向测试、填色、扩散。
区域的递归填充算法要求区域是连通的,因为只有在连通区域中,才可能将种子点的颜色扩展到区域内的其它点。
区域按连通情况又可分为四连通区域和八连通区域。
四连通区域指的是从区域上一点出发,可通过四个方向,即上、下、左、右移动的组合,在不越出区域的前提下,到达区域内的任意像素。
八连通区域指的是从区域内每一像素出发,可通过八个方向,即上、下、左、右、左上、右上、左下、右下移动的组合,在不越出区域的前提下,到达区域内的任意像素。
四连通区域八连通区域
四邻法的缺点:
当用四邻法填充一个八连通区域时,由于它无法填充对角线上的连通象素,因而可能造成某些区域没有被填上。
但是,如果希望两个区域填不同的颜色,用四邻法就比较合适。
八邻法的缺点:
当用八邻法填充一个四连通区域时,由于它填充是按8个方向进行的,因而可能造成从对角线方向越界,造成意想不到的后果。
一般来说,四邻法比八邻法用得更普遍。
因为,填不满比涂出界更容易补救。
边界表示的4连通区域的递归填充算法:
voidseed_filling(x,y,fill_color,boundary_color)
intx,y,fill_color,boundary_color;
intc;
c=getpixel(x,y);
if(c!
=boundary_color&
&
c!
=fill_color)
putpixel(x,y,fill_color);
seed_filling(x+1,y,fill_color,boundary_color);
seed_filling(x-1,y,fill_color,boundary_color);
seed_filling(x,y+1,fill_color,boundary_color);
seed_filling(x,y-1,fill_color,boundary_color);
内点表示的4连通区域的递归填充算法:
voidFloodFill4(intx,inty,intoldcolor,intnewcolor)
{if(getpixel(x,y)==oldcolor)//属于区域内点oldcolor
{putpixel(x,y,newcolor);
FloodFill4(x,y+1,oldcolor,newcolor);
FloodFill4(x,y-1,oldcolor,newcolor);
FloodFill4(x-1,y,oldcolor,newcolor);
FloodFill4(x+1,y,oldcolor,newcolor);
4.4.2多边形的扫描线填充算法
简单的种子填充算法中含有4条递归语句,效率太低。
并且当区域过大时会造成堆栈溢出。
解决上述问题的办法是引入扫描线算法,得到了各种改进的算法,即区域的扫描线填充算法。
包括多边形区域的扫描线填充算法、边填充算法、栅栏填充算法、边标志算法和扫描线种子填充算法等。
基本思想:
按扫描线顺序,计算扫描线与多边形的相交区间,再用要求的颜色显示这些区间的象素,即完成填充工作。
对于一条扫描线填充过程可以分为四个步骤:
●求交(点)
●(交点)排序
●交点配对
●(区间)填色
情况1分析扫描线2、7与多边形的相交情况。
通过以上的分析,我们作出第一次修正。
当扫描线与多边形交于上顶点时,交点计数为0。
当扫描线通过多边形的下顶点时,交点计数为2。
当扫描线通过多边形的左右顶点时,交点计数为1。
情况2、上述修正还不能保证填充的正确,因为对边界上象素的取舍不当会出现所谓的“过填”问题。
“过填”造成边长为2个单位的正方形变为边长为3个单位。
避免出现上述“过填”现象,必须要对多边形的边界象素进行取舍。
1)对扫描线与多边形的相交区间取“左闭右开”。
2)对扫描线与多边形的上下顶点相交时,交点的取舍方法为“下闭上开”,即丢弃上方水平边或上顶点。
多边形扫描线填充算法的思想:
将多边形的顶点进行上述处理之后,用(水平)扫描线由下到上扫描多边形,求出每条扫描线与多边形的交点,将这些交点按x坐标进行排序,将排序后的交点成对取出,按照
左闭右开的方式以给定的颜色画线。
多边形被扫描后,填色也就完成了。
如何去求扫描线与多边形的交点?
活性边表法
把与当前扫描线相交的边称为活性边,并把它们按与扫描线交点x坐标递增的顺序存放在一个链表(或数组)中,称为活性边表(AEL)。
结点内容
x:
当前扫描线与边的交点坐标
△x:
从当前扫描线到下一条扫描线间x的增量,为1/k,其中k为斜率。
ymax:
该边所交的最高扫描线号ymax
扫描线6的活性边表。
假定当前扫描线与多边形某一条边的交点的x坐标为x,则下一条扫描线与该边的交点不要重计算,只要加一个增量△x。
设该边的直线方程为:
ax+by+c=0;
若y=yi,x=xi;
则当y=yi+1时,
其中
=1/k为常数
当求完当前扫描线与多边形的交点后,应将与下一条扫描线不相交的边从活性边表中删除。
对于那些与下一条扫描线有交点的新边,应及时插入到活性边表中(按x递增排序)。
为了能快速找出与当前扫描线第一次有交点的新边,我们为每一条扫描线建立一个新边表(NEL)
新边表的建立:
先按低端点的y坐标值对所有的边进行分组,若某边的低端点y值为ymin,则该边就放在扫描线y=ymin所对应的表中;
然后用排序方法,按低端点的x坐标值递增的顺序将同一组中的边排列成行。
NEL中的基本元素、结点的构成和AEL相同,每个边结点由以下四个域组成:
其中,各符号的含义为:
⏹ymax:
边的上端点的y坐标
⏹x:
在NEL中表示边的下端点的x坐标,在AEL中表示边与扫描线的交点的x坐标
⏹1/k:
边的斜率的倒数
⏹next:
指向下一条边的指针
上图所示各条扫描线的新边表NEL
当建立了边表NEL后,扫描线多边形填充算法可按如下步骤进行:
(1)初始化AEL,使之为空,取扫描线纵坐标y的初始值为多边形所有顶点中最小的y值。
(2)将NEL中与当前y有关的结点加入至AEL,同时保存AEL中按x值从小到大实现的排序序列。
(3)对于AEL中的扫描线y,在一对交点之间填充所需要的像素值。
(4)从AEL中删掉y>
=ymax的结点。
(5)对于留在AEL中的每个结点,执行xi+1=xi+1/k。
(6)对AEL中的各结点按x值从小到大排序。
(7)y=y+1,成为下一条扫描线的坐标。
(8)若AEL非空,转
(2),否则,停止。
基本原理:
对每一条扫描线,依次求与(经过顶点处理的)多边形各边的交点,将该扫描线上交点右边的所有像素求补。
算法虽然简单易行,但对于复杂图形而言,一些像素的颜色值需反复改变多次,且多边形外的像素处理过多,输入、输出的量比有序边表大的多(可用矩形包围盒提高效率)。
4.4.3边填充算法
栅栏填充算法
对于每条扫描线与多边形的交点,将交点与栅栏之间的扫描线上的像素取补,也就是说,若交点位于栅栏左边,则将交点之右、栅栏之左的所有像素取补;
若交点位于栅栏右边,则将栅栏之右、交点之左的所有像素取补。
多边形外的像素处理大大减少,被重复取补的像素数目也有减少,但仍有一些像素被重复取补。
参见教材图4.3.6
边标志算法:
对多边形边界所在像素置一个特殊标志(对多边形的每条边进行直线扫描转换);
对于每条与多边形相交的扫描线,从左至右逐个访问该扫描线上的像素。
使用一个布尔变量inside来指示当前点的状态,若点在多边形内,则inside为真。
若点在多边形外,则inside为假。
inside的初始值为假,每当当前访问像素为被打上标志的点(即边界点)就把inside取反。
对未打标志的点,inside不变。
若inside为真,则把该像素置为多边形要填充的颜色。
对每个像素只访问一次,硬件执行速度快。
voidedgemark_fill(polydef,color)
多边形定义polydef;
intcolor;
{对多边形polydef每条边进行直线扫描转换;
inside=FALSE;
for(每条与多边形polydef相交的扫描线y)
for(扫描线上每个象素x)
{
if(象素x被打上边标志)
inside=!
(inside);
if(inside!
=FALSE)
drawpixel(x,y,color);
elsedrawpixel(x,y,background);
4.4.4扫描线种子填充算法
算法思想:
在任意不间断区间中只取一个种子像素(不间断区间指在一条扫描线上一组相邻元素),填充当前扫描线上的该段区间;
然后确定与这一区段相邻的上下两条扫描线上位于区域内的区段,并依次把它们保存起来,反复进行这个过程,直到所保存的每个区段都填充完毕。
可以填充有孔区域,对于每一个待填充区段,只需入栈一次,因此提高了区域填充的效率。
(1)初始化:
堆栈置空。
将种子点(x,y)入栈。
(2)出栈:
若栈空则结束。
否则取栈顶元素(x,y),以y作为当前扫描线。
(3)填充并确定种子点所在区段:
从种子点(x,y)出发,沿当前扫描线向左、右两个方向填充,直到边界。
分别标记区段的左、右端点坐标为xl和xr。
(4)并确定新的种子点:
在区间[xl,xr]中检查与当前扫描线y上、下相邻的两条扫描线上的象素。
若存在非边界、未填充的象素,则把每一区间的最右象素作为种子点压入堆栈,返回第
(2)步。
上述算法对于每一个待填充区段,只需压栈一次;
因此,扫描线填充算法提高了区域填充的效率。
 升级会员
升级会员 