哈工大自控大作业报告Word格式文档下载.docx
《哈工大自控大作业报告Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《哈工大自控大作业报告Word格式文档下载.docx(10页珍藏版)》请在冰点文库上搜索。
英才学院
学号:
**********
2014/12/15
自动控制原理
大作业任务书
设计任务和要求:
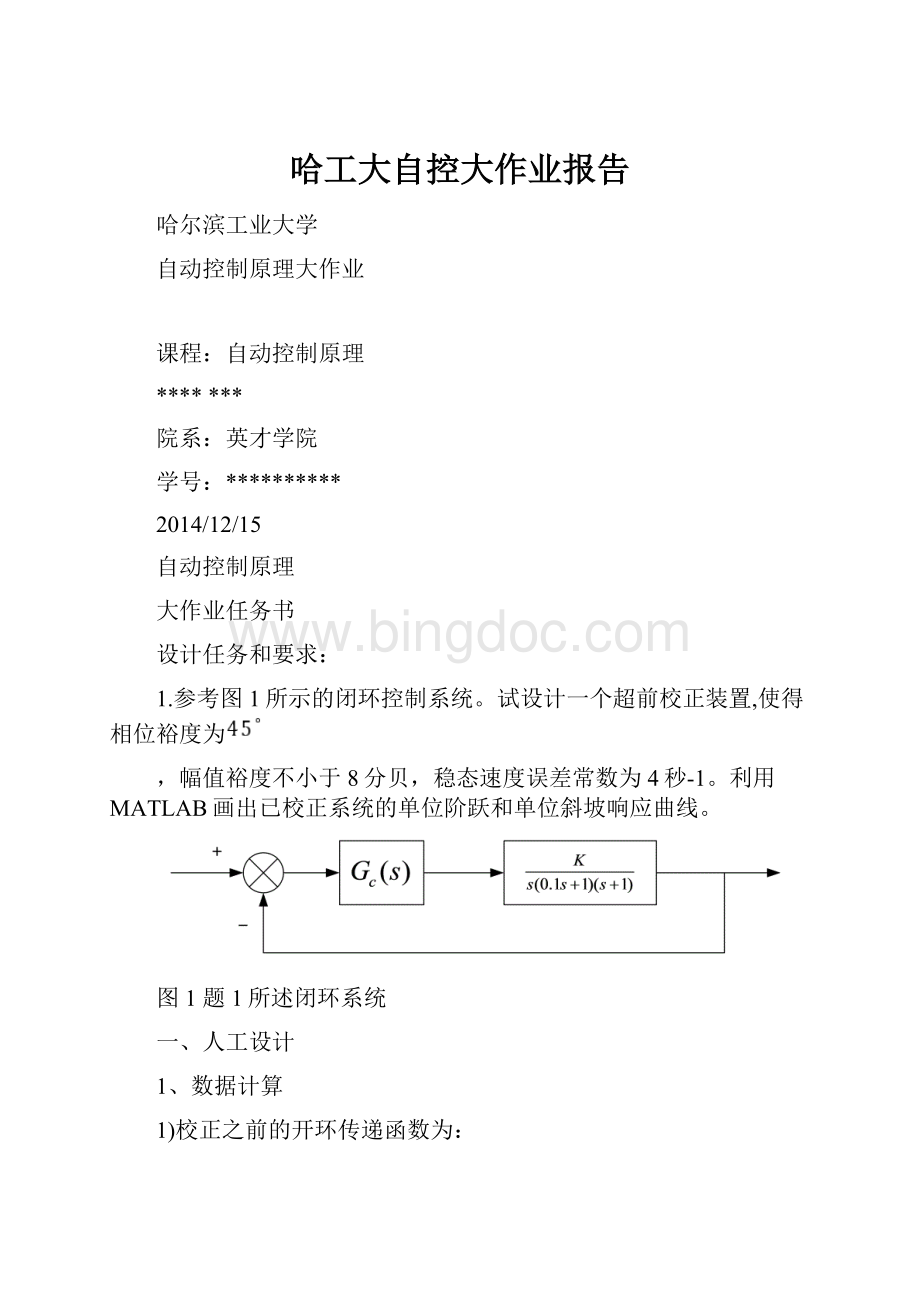
1.参考图1所示的闭环控制系统。
试设计一个超前校正装置,使得相位裕度为
,幅值裕度不小于8分贝,稳态速度误差常数为4秒-1。
利用MATLAB画出已校正系统的单位阶跃和单位斜坡响应曲线。
图1题1所述闭环系统
一、人工设计
1、数据计算
1)校正之前的开环传递函数为:
由题目要求,系统的稳态速度误差常数[1]
为4秒-1,由公式
,得K=4。
由放大环节、积分环节和两个惯性环节构成。
未校正时系统的幅值穿越频率
,Bode图以-40dB/dec的直线穿过0dB线,计算出相位裕度
。
可见,未加补偿时,系统是稳定的,但是相位裕度不满足要求。
由于设计后的系统的性能指标为
,对
无要求,
,若取
,则应有
,可以采用超前补偿网络校正。
2)确定补偿网络参数
原系统的Bode图以-40dB/dec穿过0dB线,若以-20dB/dec穿过0dB线,有可能满足要求。
原系统的转折频率为1rad/s和10rad/s,可以在
之间任取一点作为
,在
,这里不妨取
=1.5rad/s,取
rad/s,
20,方案可行。
所以,校正装置的传递函数为:
校正后的传递函数为:
3)系统校正前后的bode图
手工绘制的bode图如下:
4)性能指标验算数据
校正后系统的各项参数如下:
幅值穿越频率:
相位裕度:
幅值裕度:
稳态速度误差:
4s-1
可以看出,校正网络有效的提高了相位裕度,校正后的系统符合要求。
2、计算机辅助设计
1)Simulink仿真框图
●阶跃响应仿真框图
●斜坡响应仿真框图
2)Bode图
●校正之前
●校正之后
●校正前、校正后、校正网络
3)根轨迹图
校正后开环传递函数的根轨迹为:
4)阶跃响应曲线
●校正之前单位阶跃响应曲线:
●校正之后单位阶跃响应曲线:
5)性能指标要求的其他曲线
二、校正装置电路图
其中,
这里我们取
三、设计结论
校正之后,系统的参数分别为:
幅值裕度:
可以看出,超前校正网络有效的提高了系统的相位裕度,由单位阶跃响应曲线和斜坡响应曲线可以看出,校正后系统非常稳定,系统符合要求。
四、设计后的心得体会
这次设计既是对学过的知识的一种复习,也是对自我创新能力的提升,是对多种知识、软件的综合应用。
设计过程中,我对学过的超前滞后校正系统有了更直观的认识,通过设计,我使一个稳定程度不高的系统变得稳定,并且通过matlab直观的反应出来。
我觉得这次大作业让我成长很多,进步很多。
参考文献:
[1]梅晓榕.自动控制原理.北京.科学出版社.2007.2.
 升级会员
升级会员 