第1章自由度答题.docx
《第1章自由度答题.docx》由会员分享,可在线阅读,更多相关《第1章自由度答题.docx(11页珍藏版)》请在冰点文库上搜索。
第1章自由度答题
课程名:
机械设计基础 (第一章) 题型 计算题
考核点:
机构自由度计算,确定机构是否具有确定的相对运动 :
难度系数
高难度
中等难度
低难度
题号加*表示
**
*
无
分值
7分
6分
5分
一,判断下列构件的组合的运动链是否能动,如果能动,要满足什么条件才能有确定的相对运动(有复合铰链、局部自由度和虚约束的需指出)
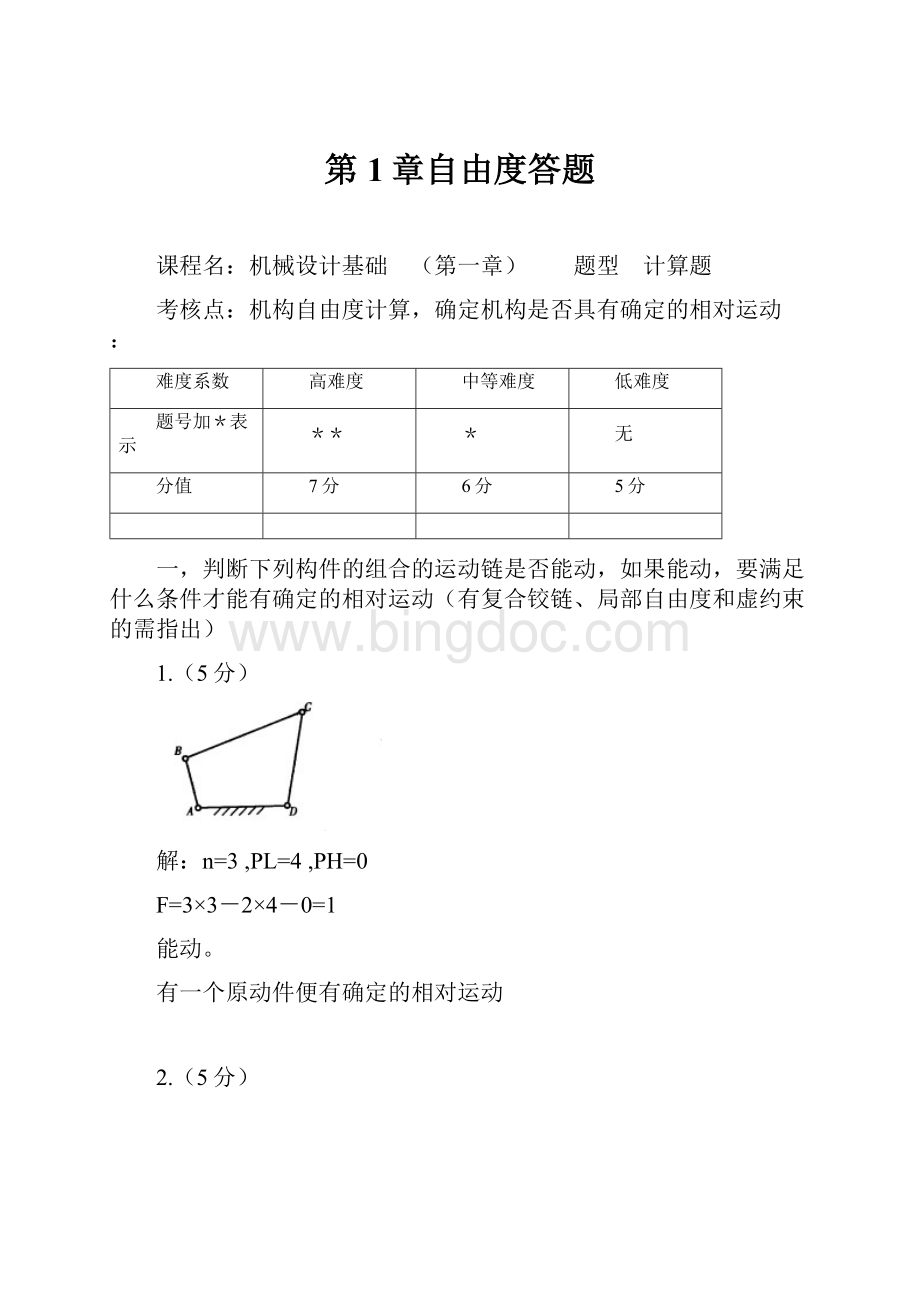
1.(5分)
解:
n=3,PL=4,PH=0
F=3×3-2×4-0=1
能动。
有一个原动件便有确定的相对运动
2.(5分)
解:
n=3,PL=4,PH=0
F=3×3-2×4-0=1
能动。
有一个原动件便有确定的相对运动
3.(5分)
解:
n=4,PL=5,PH=0
F=3×4-2×5=2
能动。
有二个原动件便有确定的相对运动
*4.(6分)
解:
B处为复合铰。
F=3×5-2×7=1
能动。
有一个原动件便有确定的相对运动。
*5.(6分)
解:
有一个局部自由度。
n=6PL=8PH=1
F=3×6-2×8-1=1
能动。
有一个原动件便有确定的相对运动。
*6.(6分)
解:
有一个局部自由度。
n=8PL=11 PH=1
F=3×8-2×11-1=1
能动。
有一个原动件便有确定的相对运动
*7.(6分)
解:
n=8PL=11
F=3×8-2×11=2
能动。
有二个原动件便有确定的相对运动
*8.(6分)
解:
有一个局部自由度。
n=6PL=8PH=1
F=3×6-2×8-1=1
能动。
有一个原动件便有确定的相对运动
**9.(7分)
解:
有一个局部自由度。
一个虚约束。
n=4PL=4 PH=2
F=3×4-2×4-2=2
能动。
有二个原动件便有确定的相对运动
**10.(7分)
解:
有一个局部自由度。
一个虚约束,一个复合铰。
n=9PL=12 PH=2
F=3×9-2×12-2=1
能动。
有一个原动件便有确定的相对运动
**11.(7分)
.
解:
有一个复合铰。
n=4PL=4PH=2
F=3×4-2×4-2=2
能动。
有二个原动件便有确定的相对运动
**12(7分)
解:
有一个局部自由度。
一个虚约束。
一个复合铰。
n=8PL=11 PH=1
F=3×8-2×11-1=1
能动。
有一个原动件便有确定的相对运动
*13.(6分)
解:
去掉中间杆(一个构件和两个回转副)的虚约束。
n=3PL=4PH=0
F=3×3-2×4-0=1
能动。
有一个原动件便有确定的相对运动
**14.(7分)
解:
有一个局部自由度。
n=4PL=5 PH=1
F=3×4-2×5-1=1
能动。
有一个原动件便有确定的相对运动
**15.(7分)
解:
有一个复合铰。
n=4PL=5 PH=1
F=3×4-2×5-1=1
能动。
有一个原动件便有确定的相对运动
**16.(7分)
解:
有一个复合铰。
n=7 PL=10 PH=0
F=3×7-2×10-0=1
能动。
有一个原动件便有确定的相对运动
*17.(6分)
解:
n=5PL=7 PH=0
F=3×5-2×7-0=1
能动。
有一个原动件便有确定的相对运动
**18.(7分)
解:
n=4PL=5 PH=1
F=3×4-2×5-1=1
能动。
有一个原动件便有确定的相对运动
**19.(7分)
解:
有一个复合铰。
n=7PL=10 PH=0
F=3×7-2×10-0=1
能动。
有一个原动件便有确定的相对运动
**20.(7分)
解:
有二个复合铰。
n=5PL=6 PH=2
F=3×5-2×6-2=1
能动。
有一个原动件便有确定的相对运动
*21(6分)
解:
n=7PL=10 PH=0
F=3×7-2×10-0=1
能动。
有一个原动件便有确定的相对运动
*22(6分)
解:
有一个局部自由度。
n=3PL=3 PH=2
F=3×3-2×3-2=1
能动。
有一个原动件便有确定的相对运动
**23(7分)
解:
有一个局部自由度B处。
有一个虚约束(G或H)。
一个复合铰(D)。
n=6PL=8PH=1
F=3×6-2×8-1=1
能动。
有一个原动件便有确定的相对运动
*24(6分)
解:
有一个局部自由度。
一个虚约束。
n=4PL=5 PH=1
F=3×4-2×5-1=1
能动。
有一个原动件便有确定的相对运动
**25(7分)
.
解:
有一个局部自由度。
FG杆为虚约束,凸轮处有一个虚约束
n=5PL=6 PH=2
F=3×5-2×6-1=2
能动。
有2个原动件便有确定的相对运动
 升级会员
升级会员 