鲁棒控制-3-H无穷控制理论资料下载.pdf
《鲁棒控制-3-H无穷控制理论资料下载.pdf》由会员分享,可在线阅读,更多相关《鲁棒控制-3-H无穷控制理论资料下载.pdf(28页珍藏版)》请在冰点文库上搜索。
0P为标称对象;
()rs是已知的稳定的实有理函数。
鲁棒镇定:
K镇定G,即对,PKG使闭环系统内稳定。
PK0PK+鲁棒控制课堂笔记清华大学自动化系钟宜生设K镇定标称对象0P,则:
()()()101KsPsKs+RH由Nyquist判据或小增益定理知,对于摄动后受控对象0PP=+,闭环系统内稳定的充分条件是:
()()()()1011,jKjPjKj+R那么,K内镇定G中任意P的充分条件是:
()()()()1011,rjKjPjKj+R等价于()()()()10sup11rjKjPjKj+R问题:
求K使标称系统内稳定,且:
()()()()1011rsKsPsKs+-H次优问题说明:
1)上述条件也是必要的;
2)可对应有MIMO系统的结果:
1I;
3)()s可以是不稳定的,只要()0Ps和()Ps具有相同数目的不稳定极点。
(4)时域鲁棒稳定问题对于系统()()()000xtABCxt=+?
该系统鲁棒稳定iff0A稳定,且()11000CsIAB即()10001CsIAB(5)状态反馈鲁棒镇定问题()101KPK+鲁棒控制课堂笔记清华大学自动化系钟宜生考虑不确定系统()()()xtAxtBut=+?
其中:
0AAA=+;
0BBB=+12ABDEEDE=TI问题:
求状态反馈,.uKxst=()()112001EEKsIABKD+-H次优问题(6)跟踪问题12uCrCy=+考虑控制性能指标:
222minminryryuu+=即()2220minryudt+令ryzu=则1212111zrCPCPzrTrCPCP=性能指标等价为:
220minminTzzdtz=设22,1rrrWddd=HP2C+1Cruy鲁棒控制课堂笔记清华大学自动化系钟宜生问题:
求1C和2C使系统内稳定,且:
1222122,1,minsupminzrCCdHdzrCCPzzTWdTW=内稳-H最优问题(7)混合灵敏度控制问题令()()11SPsKs=+称S为灵敏度函数。
则干扰抑制问题为:
求K,镇定标称受控对象P,且使得1minKPWS内镇定若要求干扰对输出的影响达到一定水平之下即可,则可适当选取加权1W,将干扰抑制问题描述为:
求K,镇定标称受控对象P,且使得11WS考虑乘性摄动()1PP=+其中稳定,且()()2,jWjR。
则闭环系统鲁棒稳定的充分必要条件为:
K镇定标称受控对象P,且使得21WT其中()()()()11TPsKsPsKs=+,称T补灵敏度函数。
若综合考虑干扰抑制问题和鲁棒镇定问题,则可考虑混合灵敏度控制问题:
设计控制器K,其镇定标称受控对象P,且使得121WSWTPKdy鲁棒控制课堂笔记清华大学自动化系钟宜生3.2标准标准H控制问题控制问题考虑图所示反馈控制系统。
11122122GGzwwGGGyuu=()()111122221,lzwzGGKIGKGwFGKwTw=+=其中G称为广义受控对象;
(),lFGK为关于G和K的(下)线性分式变换(LFT),定义为()()111122221,lFGKGGKIGKG=+H控制的标准问题:
求一真实有理控制器K,使得闭环系统为内稳定,且使得zwT的H范数极小,即minzwTK内稳G-H最优控制或使得闭环系统内稳定,且使得zwT-H次优控制其中是一给定正实数。
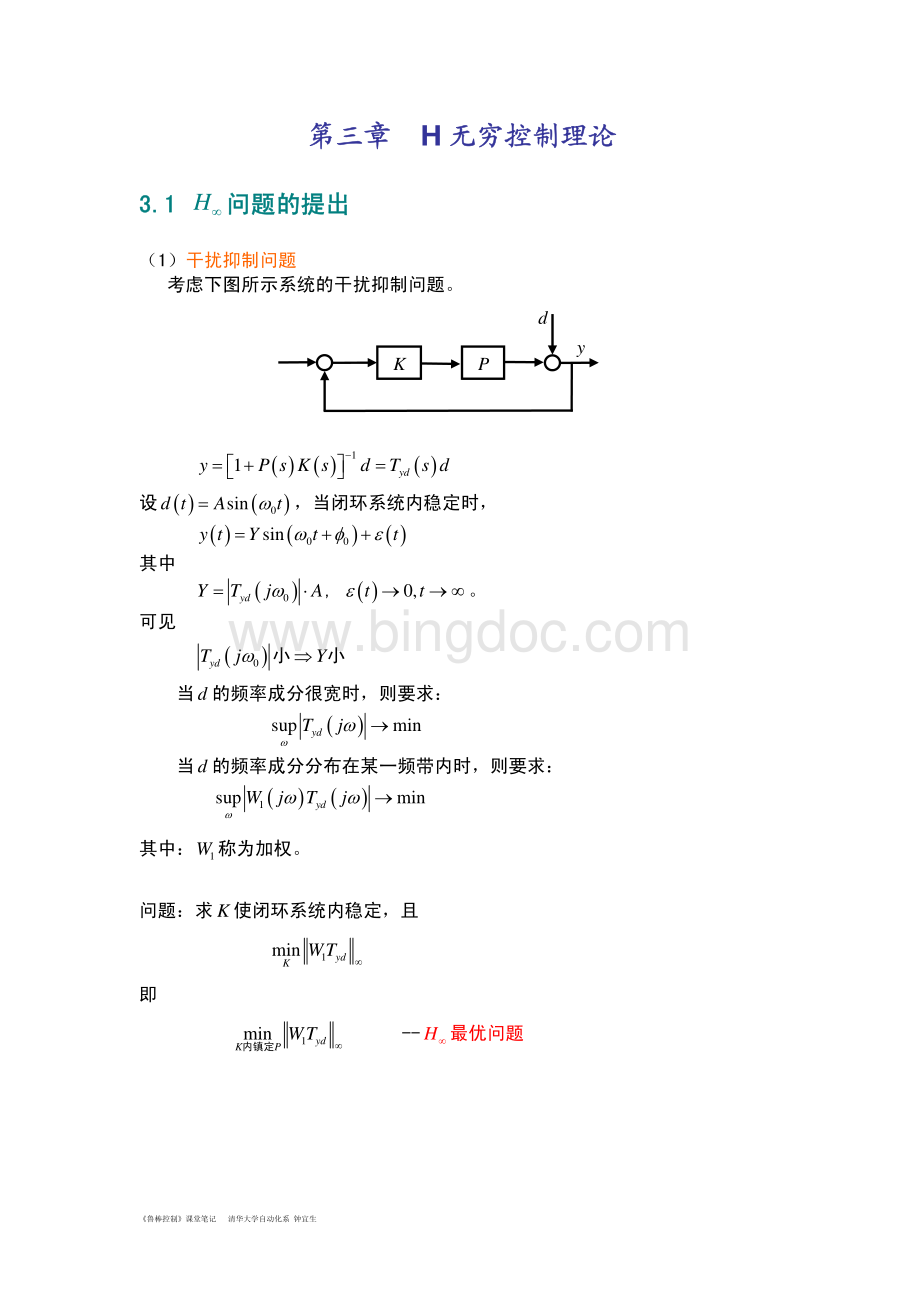
1、干扰抑制问题标准问题(),lFGKGKzuyPKdyPKzuydyG鲁棒控制课堂笔记清华大学自动化系钟宜生()1min1KPK+内稳PzdPuydPuukywd=11zPwyPu=()()()111111zwTPKPKPK=+=+问题:
()1minmin1zwKGKPTPK=+内稳内稳2、鲁棒镇定问题标准问题求K,内稳0P,且()1011rKPK+0PK+()()jrj或0PKzuyGrG鲁棒控制课堂笔记清华大学自动化系钟宜生001rzwPyu=()1001zwTrKPK=+问题:
求,K使G内稳定,且1zwT。
3、跟踪问题标准问题求12,CC,使得系统内稳定,且121211min1CPCPWCPCP()()112121211212111122221111011000010CPCPWPWCPCWCCPWPWCCCCPGGKIGKG=+=+=+令000ryWPuIzGyuurWyP=问题:
minzKGT内稳P2C+1CruyG鲁棒控制课堂笔记清华大学自动化系钟宜生4、混合灵敏度控制问题标准问题121WSWT,求一常数矩阵F,使得状态反馈uFx=,满足如下条件(称之为SF条件):
2ABF+为渐近稳定阵且zT其中()()()11122111zTsCDFsIABFBD=+设()()121rankDip=,U和是满足下式的任意矩阵:
1212,rankrankpiimDUUUi=RR选择矩阵()22mimFR使其满足0,TTFFFI=当2im=时,即12D为列满秩时,令0F=。
当120D=时,令,0FFIH=。
设21111TDDI,定义:
()1211111111TTRIDIDDD=+()()()111TTTTFHURU=()1211111111TTFAABIDDDC=+()122111111112TTFBBBIDDDD=+()1122111111111TTFCIDIDDDC=+()12211111TFDBIDD=鲁棒控制课堂笔记清华大学自动化系钟宜生()11221111111112TTFFIDIDDDD=+定理:
对于满足假设()1A的系统()*,满足SF条件的状态反馈矩阵F存在的充要条件是:
(1)21111TDDI和正定矩阵Q,使得Riccati代数方程:
()()TTTTFFFFFFFFFFFFABHFCPPABHFCPDDP+()10TTTTTFFFFFFFFFFFFPBHBPPBBPCIFHFCQ+=存在正定解P。
若上述条件成立,则如下F满足SF条件:
12TTTFFFFFFFFHBPHFC=+假设()2A:
1112112120,0,TTDDCDDI=。
定理:
对于满足假设()()12AA、的系统()*,使SF条件成立的F存在的充分必要条件是:
存在0Q,使得代数Riccati方程:
21122110TTTTAPPAPBBPPBBPCCQ+=存在正定解P。
2TFBP=对假设()2A的解释:
2211222zCxDu=+()()1121120TTTTxCuDCxDudt=+()1112121211120TTTTTTTTxCCxuDDuuDCxxCDudt=+()110TTTxCCxuudt=+假设()3A:
11120,0DD=定理:
对于满足假设()()13AA、的系统()*,使SF条件成立的F存在的充分必要条件是:
存在正数0和矩阵0Q,使得Riccati代数方程:
211221110TTTTAPPAPBBPPBBPCCQ+=鲁棒控制课堂笔记清华大学自动化系钟宜生存在正定解P。
当上述和Q存在时,若令212TFBP=则SF条件成立。
证明:
令uFx=,由假设()3A,有()211xABFxBzCx=+=?
因此()()1121zTsCsIABFB=欲证2ABF+为稳定矩阵且()()()()111211212TzzTsTsCsIABFBCsIABFBI=由Riccati代数方程:
211221110TTTTAPPAPBBPPBBPCCQ+=22222111111022TTTTTABBPPPABBPPBBPCCQ+=()()22211110TTTABFPPABFPBBPCCQ+=()()2221111TTTsIABFPPsIABFPBBPQCC+=()()()()()()()()112112112121121112211121121TTTTTTTTTTTBPsIABFBBsIABFPBBsIABFPBBPsIABFBBsIABFQsIABFBBsIABFCCsIABFB+=+()()()()()()11211121121112211121121TTTTTTTTIIBPsIABFBIBPsIABFBBsIABFQsIABFBBsIABFCCsIABFB+=+2ABF+为稳定矩阵()121sIABFB+右乘左乘()12TTBsIABF+鲁棒控制课堂笔记清华大学自动化系钟宜生()()()()()()()11211121121112211111121121212100TTTTTTTIIBPsIABFBIBPsIABFBBsIABFQsIABFBIBPsIABFBIBPsIABFBIIQsIABFBsIAB+=+()()()1211121121TTTFBBsIABFCCsIABFB=+()()()()111211212TzzTsTsCsIABFBCsIABFBI=3.4输出反馈输出反馈H控制控制考察Riccati代数方程0TAXXAXRXQ+=和相应的Hamiton矩阵TARHQA=如果X是上述的Riccati代数方程的唯一对称解,且ARX是稳定阵,则记为()HdomRic,()XRicH=引理:
假设Hamiton矩阵H有如下形式:
TTTABBHCCA=如果,AB是可镇定的,则()HdomRic且()0XRicH=若进而,CA是可检测的,则()0XRicH=考虑输出反馈控制系统:
列满秩列满秩GKzuy()121111222122xAxBBuzCxDDuyCxDDu=+=+=+?
鲁棒控制课堂笔记清华大学自动化系钟宜生121111222122ABBGCDDCDD=1212,mmppnxuzyRRRRR假设:
()1A()2,AB可镇定,()2,CA可检测;
()2A12D列满秩,且D.st12DD为正交方阵;
21D行满秩,且D?
.st21DD?
为正交方阵;
()3A:
2112AjIBCD对R均列满秩;
()4A1221AjIBCD对R均行满秩;
()5A220D=。
定义:
1211111120,00mTIRDDDDD=iii2112111210,00TmDIRDDDD=iii?
若1R和1R?
存在,则定义:
11111110TTTTTABHRDCBCCACD=ii11111110TTTTTACJRDBCBBABD=ii?
如果(),HJdomRic,则令()(),XRicHYRicJ=定义:
()1111122TTmmFFRDCBXF=+=i()11112TTHBDYCRHH=+=i?
作分块:
()121111111211211211122ppDDDpDD=?
12pp?
122mpp鲁棒控制课堂笔记清华大学自动化系钟宜生定理:
设系统()满足()()15AA,则:
(1)存在控制器()Ks使闭环系统内稳定,且使zT;
()ii()HdomRic,且()0XRicH=;
()iii()JdomRic,且()0YRicJ=;
()iv()2XY,()i表示最大特征值。
(2)如果上述条件成立,则使闭环系统内稳定且使zT的实有理控制器全体为:
(),laKFKQ=12aAKCC=11121BDD2210BD,QQRH其中()1211112111111111111111121122TTDDDIDDDD=2212mmDR和2221ppDR是满足下式的任意矩阵:
12D()12121121111111111121TTTDIDIDDD=21TD()12211112111111111112TTDIDIDDD=其余矩阵定义为2B()1211212ZBHDD=+()2212211CDCDF=+1B=122ZHB+112D11D1211CFD=+121D2C1AABFB=+121D2C2ZIYX=H次优问题的求解:
求K使闭环系统内稳定,且zT。
解:
直接应用定理的结论。
aKQuy鲁棒控制课堂笔记清华大学自动化系钟宜生H最优问题的求解:
求K使闭环系统内稳定,且使zT=高,方111122min,XRXRRRRHRL两块问题(3)()()23,pnmlTT=RHRHRH2T的内外分解:
()1222222,ioiooTTTTTT=RH3T的互内外分解:
()1333333,cocicicocoTTTTTT=RH则12312233123iocociiciTTQTTTTQTTTTXT=其中:
23ocoXTQT=。
选取2T使22iTT成为方的内矩阵,则:
12312230iciXTTQTTTTT=因对于方的内矩阵和方的互内矩阵,有TTTTI=,所以123TTQT()()()22213320iiciciTXTTTTTT=120RXR=12RXR=其中:
()()1213iciRTTT=RL()()2213ciRTTT=RL23ocoXTQT=RH鲁棒控制课堂笔记清华大学自动化系钟宜生频率域方法求解过程可概括为:
原问题标准问题minzKGT内稳K(Youla参数化)模型匹配问题123minQTTQTRHQ(内外分解)NehariNehari问题minXRXRHX
 升级会员
升级会员 