临近空间长航时侦察打击一体化无人机.docx
《临近空间长航时侦察打击一体化无人机.docx》由会员分享,可在线阅读,更多相关《临近空间长航时侦察打击一体化无人机.docx(17页珍藏版)》请在冰点文库上搜索。
临近空间长航时侦察打击一体化无人机
临近空间长航时侦察打击一体化无人机
临近空间长航时侦察打击一体化无人机
总体方案研究
李军,黄海峰,牟夏,李清鹏
(西北工业大学航空学院西安710072)
摘要:
本文结合临近空间的特点,就临近空间长航时侦察打击一体化无人机设计的关键技术、总体方案性能指标、总体方案布局选型、总体方案设计、总体方案气动结构特性、传感器载荷与攻击载荷配置、作战使用等方面进行了研究和分析。
关键词:
临近空间长航时侦察打击一体化双飞翼气动结构传感器载荷攻击载荷
1临近空间特点分析
1.1临近空间的定义
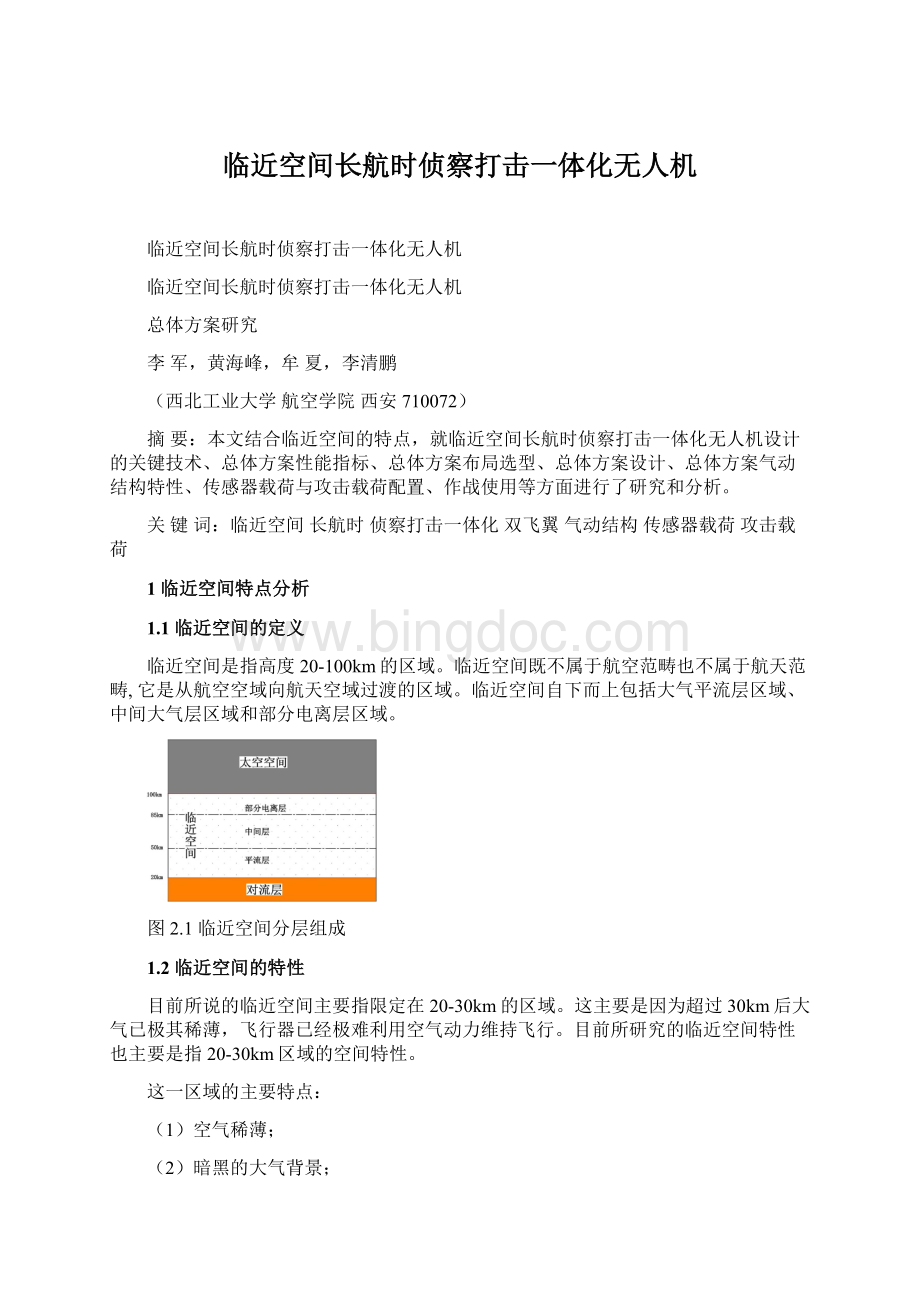
临近空间是指高度20-100km的区域。
临近空间既不属于航空范畴也不属于航天范畴,它是从航空空域向航天空域过渡的区域。
临近空间自下而上包括大气平流层区域、中间大气层区域和部分电离层区域。
图2.1临近空间分层组成
1.2临近空间的特性
目前所说的临近空间主要指限定在20-30km的区域。
这主要是因为超过30km后大气已极其稀薄,飞行器已经极难利用空气动力维持飞行。
目前所研究的临近空间特性也主要是指20-30km区域的空间特性。
这一区域的主要特点:
(1)空气稀薄;
(2)暗黑的大气背景;
(3)强烈的紫外辐射。
1.3临近空间长航时无人机关键技术
临近空间特有的属性对临近空间无人机的设计提出了苛刻的要求,而长航时要求又使临近空间无人机的设计面临更多严峻的挑战,主要有以下关键技术需要着重研究:
(1)低雷诺数条件下的飞行器空气动力特性;
(2)主动增升减阻技术;
(3)大型的轻质承载结构技术;
(4)先进的涡扇发动机技术;
(5)主动控制技术。
2临近空间长航时侦察打击一体化无人机性能指标论证
临近空间长航时侦察打击一体化无人机性能指标的确定需要综合现在以及未来一段时间(10-15年)内的军事需求、作战要求以及技术水平,并参考现有的高空长航时无人机方案,进行评估和论证。
(1)飞行高度
飞行高度的确定需要着重考虑生存能力要求、侦察能力要求、动力性能限制等因素,选取25000-27000m作为待机高度。
(2)作战半径
作战半径受国家作战思想的限制,选取5000km作为作战半径。
(3)巡航速度
巡航速度的选取需要考虑气动影响、动力限制、侦察能力、生存能力、飞行翼载等因素,选取Ma0.85作为巡航速度。
(4)待机速度
待机速度可以适当比巡航速度低,选取Ma0.80作为待机速度。
(5)待机时间
维持足够的待机时间,才能够有效监视作战区域,获取足够的精确的战场信息,使我方更准确的判断战场态势,同时,更有效的打击敌方时间敏感目标和CCC&D(欺骗、隐藏、伪装和对抗)目标。
考虑到我国的实际需求,选取待机时间24h@5000km。
(6)巡航/待机升阻比
较高的升阻比,可以增大飞行距离,延长飞行时间,降低对动力性能的要求,显著降低起飞重量,考虑到未来技术的发展和临近空间飞行的严苛要求,将待机/巡航升阻比选取为35/30。
(7)全机升力系数
全机升力系数的提高,可以降低机翼面积,从而降低结构重量和起飞重量。
选取全机升力系数为1.0。
(8)有效载荷
选取有效载荷为3000kg,其中侦察载荷1800kg,攻击载荷1200kg。
综上,得出该临近空间长航时侦察打击一体化无人机的任务剖面:
图2.1临近空间长航时侦察打击一体化无人机典型任务剖面
3总体方案布局选型
选择总体方案的布局时,需要考虑以下几个方面:
(1)应具有较高的气动效率。
(2)应具有良好的结构减重优势。
(3)应具有良好的隐身优势。
(4)应具有较好的机动能力。
综合考虑以上几个方面,提出联翼布局、鸭式飞翼布局、双飞翼布局三种总体布局方案:
图3.1连翼构型图3.2鸭式飞翼构型图3.3双飞翼布局
我们在此选择双飞翼布局作为研究对象。
4总体方案设计
4.1起飞重量
利用质量系数法进行起飞重量的计算。
表4.1起飞重量
油重系数
Wf/W0
0.490
空重系数
We/W0
0.400
燃油重量
Wf
13323
空机重量
We
10882
载荷重量
Wpl
3000
起飞总重
Wto
27205
4.2起飞重量权衡
针对巡航升阻比-待机升阻比、巡航耗油率-待机耗油率、巡航半径-待机时间、空重系数-有效载荷、待机耗油率-待机升阻比五种指标组合进行起飞重量的分析和权衡。
图4.1巡航升阻比-待机升阻比权衡图4.2巡航耗油率-待机耗油率权衡
图4.3巡航半径-待机时间权衡图4.4空重系数-有效载荷权衡
图4.5待机升阻比-待机耗油率权衡
4.3总体方案设计
图4.6前视图
图4.7侧视图
图4.8俯视图
5总体方案气动特性分析
5.1
计算
计算采用部件构成法,充分考虑层流/紊流分布、部件的干扰、部件的形状等因素。
表5.125000m&Ma0.80巡航状态
计算表
巡航高度
25000m
巡航速度
Ma0.80
部
件
浸湿
面积
参考尺寸
层流分布
平板摩擦
阻力系数Cfe
部件形状因子FF
部件干扰因子Q
部件CD0
前翼
132.37
2.31
0.5
0.002546
1.5322827
1.05
0.005372
后翼
332.60
3.47
0.5
0.002306
1.5322827
1.05
0.012224
机身
74.40
24.18
0.0
0.002704
1.0569137
1.02
0.004298
垂尾
33.43
3.08
0.2
0.003235
1.3712448
1.05
0.001542
发动机舱
17.87
4.55
0.0
0.003557
1.9259034
1.05
0.001273
SUM
0.023437
表面粗糙物影响因子
1.05
CDO
0.024608
5.2层流控制与干扰控制减阻计算
由以上可见,零升阻力的计算结果与设计值(0.015)相比偏大,这必将造成飞机升阻比的降低,使飞机无法满足飞行高度、航时、航程、有效载荷等设计要求,必须通过合理的措施来降低零升阻力。
在此采取的降低零升阻力的主要技术措施有两项:
(1)主动层流控制
飞机零升阻力的增加很大一部分来自于翼面的气流分离,这种分离在迎角增大时会加剧。
通过在机翼翼面上布置涡流发生器,使机翼上的分离气流重新变为层流分布,可以显著降低零升阻力。
图5.1主动流动控制技术示意图
(2)主动干扰控制
对于双飞翼构型来说,在前翼与机身、后翼与机身、垂尾与后翼、垂尾与机身等部件之间均存在干扰,这些干扰增加了零升阻力。
通过在部件结合位置布置吹气装置和气流引导装置,使部件之间原有的不利干扰变为有利干扰,从而降低零升阻力。
5.3全机气动特性计算
利用涡格法计算全机小迎角状态下的气动特性。
图5.2全机涡格图
图5.325km,Ma0.80,alpha=0时气动力分布
图5.425km,Ma0.80,alpha=0全机Cl及下洗角分布
图5.5aH=25000m时初始升阻比图5.5bH=25000m时采用层流控制、干扰控制时升阻比
从计算可见,在双机身内侧区域内,前后翼的升力系数都有所降低,作为主升力面的后翼的内侧受前翼下洗影响较为明显,应该采取合适的措施对流场进行控制,降低不利影响。
从升阻比上来看,单纯的通过层流控制和干扰控制降低零升阻力并不能达到所需的升阻比,还需要通过进一步措施,如优化的扭转设计、自适应机翼设计等,来降低诱导阻力。
计算表明,要达到临近空间长航时飞行的设计要求,是非常困难的,双飞翼布局具有一定的优势,也存在一定的不足,需要在增升减阻方面作进一步的研究。
6传感器载荷配置
6.1侦察任务和侦察传感器载荷
不同的侦察无人机执行的侦察任务有很大差异。
临近空间长航时侦察打击一体化无人机执行的侦察任务可分为对地侦察和对空侦察两大类。
不同的侦察任务有着不同的战术技术指标要求,如作用距离、侦察精度、需用功率等;根据侦察任务选择所需的侦察传感器载荷,并结合飞行平台等方面的要求确定传感器载荷的重量、功率、尺寸等要求。
(1)对地静止目标侦察
对地面静止目标的监视侦察可利用合成孔径雷达(SAR)。
(2)对地移动目标侦察
将合成孔径雷达和活动目标指示器结合在一起,两者采用同一副天线,组成合成孔径雷达/地面移动目标指示器(SAR/GMTI),可以实现地面移动目标指示、跟踪与辨认。
(3)对地隐藏目标侦察
对地隐藏目标侦察采用穿透性较好的UHF波段SAR雷达。
(4)对空近程精确探测识别
对空中动目标的精确侦察、跟踪与辨认是临近空间长航时侦察打击一体化无人机侦察任务的重要方面,而且需要实现360°的全方位侦察。
选用X波段AESA预警雷达,通过合理的天线阵布局,可实现全方位空中动目标的精确辨认、定位和跟踪。
(5)对空远程预警
采用低波段雷达可以提高探测距离,并降低地面(海面)杂波的影响。
可采用的最低波段为UHF波段和S波段,考虑到探测隐身目标等需要,采用UHF波段AESA雷达将更为合适。
6.2共用口径与综合传感器系统
临近空间长航时侦察打击一体化无人机借助有源电子扫描阵列技术和频段综合化技术,实现机上各类传感器的综合,即将其传感器设计成有源电子扫描共用口径天线。
传感器
UHF波段
X
波段
对空
远程预警
对地隐藏目标侦察
对空
近程探测识别
对地静止目标侦察
对地移动目标侦察
+
X/UHFAMTI/SAR/GMTIAESA
侦察任务
使用波段
AMTI+SAR+GMTIAESA
X+UHF
+
图6.1传感器综合示意图
6.3共形传感器/共形天线
共形天线将原来简单的平面结构变为曲面结构,适合在飞机、舰船等具有复杂外形要求的平台上应用,根据实际需求如探测覆盖范围利用分布式网络布设在诸如飞机蒙皮等曲面结构上。
临近空间长航时侦察打击一体化无人机在对天线进行综合设计成综合传感器系统的同时,采用共形天线技术,将天线以分布式网络的形式布设在机翼、机身的蒙皮上,降低重量,极大地改善气动性能、隐身性能和雷达性能。
前翼
机身
后翼
X/UHFAMTIAESA
X/UHFAMTI/SAR/GMTIAESA
X/UHFAMTIAESA
前向探测
空中预警
侧向探测
空中预警/SAR成像/动目标指示
后向探测
空中预警
SatCOM
卫星通讯
图6.2全机主要共形传感器布置框图
图6.3全机主要传感器布置和功能示意图
7攻击载荷配置
作为一种侦察打击一体化无人机,其打击目标主要为地面关键目标以及时间敏感目标,如地面雷达站、移动的导弹发射架、有主要目标的车辆等,因此其携带的主要武器载荷就是对地攻击武器。
结合重量、尺寸等方面的要求,为其配备对地攻击武器如下。
7.1小直径精确制导炸弹
布局:
折叠菱形翼布局
重量:
120kg长度:
1000mm直径:
120mm
打击范围:
5-30km、
动力方式:
无动力
制导方式:
北斗卫星/INS制导+数据链位置修正制导
SEP:
北斗卫星/INS制导<3m,加数据链位置修正制导<1.5m。
图7.1小直径精确制导炸弹弹翼展开/折叠状态图
7.2激光精确制导炸弹
布局:
常规折叠尾翼布局
重量:
360kg长度:
2400mm直径:
280mm
打击范围:
5-20km
动力方式:
无动力
制导方式:
激光制导+数据链位置修正制导
SEP:
激光制导<3m,加数据链位置修正制导<1m。
图7.2激光精确制导炸弹尾翼展开/折叠状态图
7.3反辐射巡飞弹
布局:
串列充气翼布局
重量:
120kg长度:
1800mm
直径:
130mm翼展:
1200mm
打击范围:
0-80km巡飞时间:
20-30min
动力方式:
小型涡扇/涡喷发动机
制导方式:
无源雷达制导+数据链位置修正制导
SEP:
无源雷达制导<3m,加数据链位置修正制导<1m。
图7.3反辐射巡飞弹充气翼展开/折叠状态图
8系统综述及作战使用
8.1传感器系统
传感器系统主要由X/UHFAMTIAESA雷达、X/UHFAMTI/SAR/GMTIAESA雷达、综合化光电红外传感器、以及卫星通讯、数据链等系统组成。
传感器载荷总重1800kg。
8.2武器系统
主要携带对地精确攻击武器,主要有小直径精确制导炸弹(D-Bomb),激光精确制导炸弹(L-Bomb)和反辐射巡飞弹(ARC-Missle)三种型号。
武器载荷总重1200kg。
8.3动力系统
采用两台大涵道比涡轮风扇发动机。
发动机根据临近空间的密度、温度等特性进行了全新设计。
两台发动机总重1930kg,附加安转装置、辅助装置等总重2122kg,地面最大推力8000DaN(8163kg),巡航可用推力90DaN(918kg),待机可用推力760DaN(776kg).
8.4飞行控制系统
采用三余度光传飞控系统,具有容错和重构能力。
8.5能源系统
利用发动机驱动发电机供电,总能量供应量1000-3000kW,采用统一的能源管理系统,进行严格的能源分配管理,以保证有限的能源供应实现最优化的工作效率。
图8.1电能管理系统示意图
8.6作战使用方案
图8.2侦察打击方案示意图
图8.3作战场景示意图
图8.4作战场景示意图
参考文献:
[1]张云阁.世界飞机手册.航空工业出版社.2000
[2]丁鹭飞等.雷达原理.西安电子科技大学出版社.2006
[3]张晓萍.联接翼飞机气动/结构一体化设计研究:
[硕士论文].南京航空航天大学.2006
[4]王和平.现代飞机总体设计.西北工业大学飞机系.1995
[5]张光义等.相控阵雷达技术.电子工业出版社.2006
[6]韦幼安等.机载雷达技术.电子工业出版社.2006
[7]汪致远等.空军武器装备.原子能出版社等.2003
[8]郭美芳等.巡飞弹:
一种巡弋待机的新型弹药.现代军事,2006,4
[9]张津等.现代航空发动机技术与发展.北京航空航天大学出版社.2006
作者简介:
李军,男,西北工业大学航空学院飞行器设计专业硕士,主要研究方向为飞行器总体设计。
 升级会员
升级会员 