单级移动倒立摆建模及串联PD校正设计Word格式.docx
《单级移动倒立摆建模及串联PD校正设计Word格式.docx》由会员分享,可在线阅读,更多相关《单级移动倒立摆建模及串联PD校正设计Word格式.docx(18页珍藏版)》请在冰点文库上搜索。
撰写报告
论文答辩
指导教师签名:
年月日
系主任(或责任教师)签名:
目录
摘要1
1单级移动倒立摆的建模2
1.1单级移动倒立摆的物理模型2
1.1.1单级倒立摆动力学方程的建立2
1.1.2单级移动倒立摆传递函数4
2单级移动倒立摆系统的串联比例微分(PD)校正5
2.1未校正系统输出动态性能5
2.2校正前系统的伯德图6
2.3系统的串联PD校正7
3校正前系统与校正后系统的比较13
4心得体会14
参考文献15
摘要
单级移动倒立摆是一个经典的快速、多变量、非线性、绝对不稳定的系统,是用来检验某种控制理论或方法的典型方案,倒立摆控制理论产生的方法和技术在半导体及精密仪器加工、机器人技术、导弹拦截控制系统和航空器对接控制技术等方面具有广阔的开发利用前景。
因此研究倒立摆系统具有重要的实践意义,一直受到国内外学者的广泛关注。
本文对单级移动倒立摆的平衡问题进行了比较深入研究,采用串联PD校正实现了系统的的平衡控制。
首先,建立了系统的非线性数学模型,并提出了合理的线性化方法,建立该装置的线性数学模型-传递函数。
其次,设计串联PD校正装置,使系统输出动态性能满足。
最后,利用Matlab软件中的SIMULINK工具对倒立摆系统的运动进行了计算机仿真,分析未校正系统的动态性能和校正后系统是否满足相应动态性能要求。
关键字:
单级移动倒立摆,非线性,建模,系统PD校正,仿真,simulink
1单级移动倒立摆的建模
1.1单级移动倒立摆的物理模型
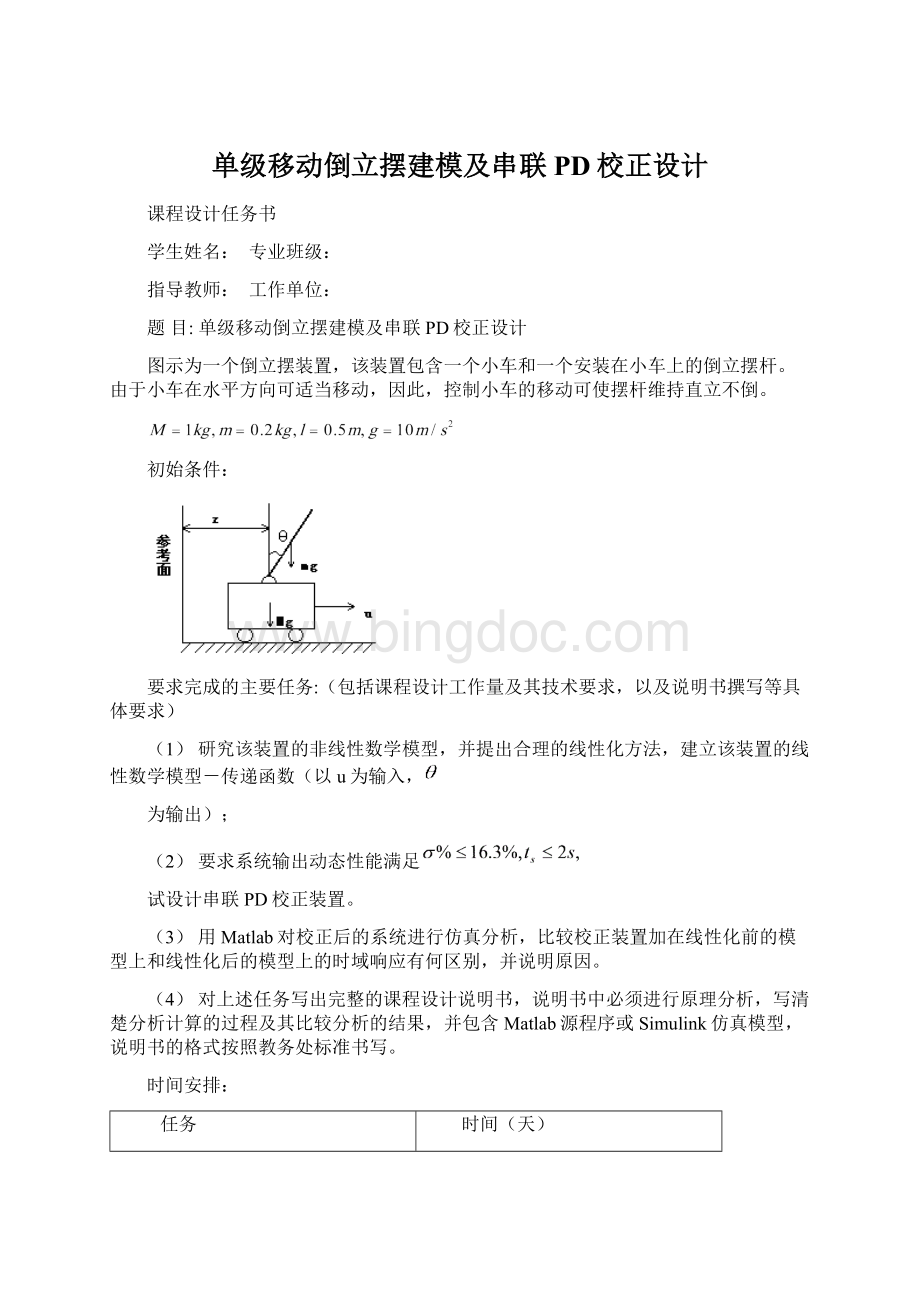
单级倒立摆系统物理模型如图1所示。
在惯性参考系的光滑水平平面上,放置一个可以水平于纸面方向左右自由移动的小车,一根钢性的摆杆通过末端的一个不计摩擦的固定点连接点与小车相连构成一个倒立摆。
倒立摆和小车共同构成了单级移动倒立摆系统。
倒立摆可以在平行于纸面的范围内自由摆动。
倒立摆控制系统的目的是使倒立摆在外力的摄动下摆杆仍然能够保持竖直向上的状态。
在小车静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆受到轻微的摄动下就会发生不可逆转的破坏而使倒立摆无法复位,这时必须使小车在平行于纸面的方向通过位移产生相应的加速度。
依照惯性参考系下的牛顿力学原理,作用力与物体对位移时间的二阶导数存在线性关系,故单级倒立摆系统是一个非线性系统。
图1单级移动倒立摆的物理模型
1.1.1单级倒立摆动力学方程的建立
在惯性参考系中,根据牛顿力学原理,分析整个系统的受力情况,如2图所示,其中,N和P为小车与摆杆相互作用力的水平和垂直分析的分量。
M小车质量m摆杆质量l摆杆转动轴心到杆质心的长度
I摆杆惯量F加在小车上的力x小车位置
摆杆与垂直向上方向的夹角(逆时针为正)
图2系统受力分析图
是摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下,顺时针为正)
应用Newton方法来建立系统的动力学方程,分析小车水平方向所受的合力,可以得到以下方程:
(1-1)
由摆杆水平方向所受的合力,可以得到以下方程:
(1-5)
(1-2)
即为:
(1-3)
合并可得:
(1-4)
为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:
(1-6)
(1-7)
合并得到力矩平衡方程如下:
方程中
,当
与l(单位是弧度)相比很小时,可以进行近似处理:
、
,用
来代替被控对象的输入力F,线性化两个运动方程如下:
(1-8)
1.1.2单级移动倒立摆传递函数
对以上方程组进行拉普拉斯变换,得到:
(1-9)
注意:
推导传递函数时假设初始条件为0。
由于输出为角度
,求解方程组可以得到:
(1-10)
于是得到传递函数为:
(1-11)
代入M(小车的质量)=1kg,m(倒立摆的质量)=0.2kg,l(倒立摆的长度)=0.5m,g(重力加速度)=10m/s2到上式得:
(1-12)
2单级移动倒立摆系统的串联比例微分(PD)校正
2.1未校正系统输出动态性能
据未校正系统的开环传递函数可以画出系统的结构图,用Matlab中的工具SIMULINK画出系统的结构图,系统结构图如图3所示。
图3系统未校正时的结构图
用Matlab函数作出系统未校正时的阶跃响应图,编写程序代码如下:
num=[1];
%定义分子多项式
den=[0.7 0 -13];
%定义分母多项式
step(num,den);
%作系统的阶跃响应图
Grid;
得到系统阶跃响应图形如图4所示。
图4系统未校正时的阶跃响应图
根据未校正系统的传达函数可以作出系统的根轨迹图,可以用Matlab作出系统的根轨迹图形,编写Matlab程序代码如下:
num=[1];
%定义分子多项式
den=[0.70-13];
%定义分母多项式
locus(num,den);
%绘制系统的根轨迹
grid;
%画出网络标度线
LaBelle('
RealAxis'
),label('
ImaginaryAxis'
);
%给坐标轴加上说明
title('
RootLocus'
%给图形加上标题得到系统未校正前的根轨迹图如图5所示。
图5系统未校正前的根轨迹图
2.2校正前系统的伯德图
用MATLAB绘制校正前系统的伯德图,编写程序如下:
num=1;
den=[0.70-13];
s1=ef(num,den);
%创建传递函数G(s)的TF模型对象
[m,pi,w]=bode(num,den);
%m为幅值pi为相角返回变量格式不做图
margin(s1);
%给开换系统模型对象s1绘制伯德图并在图上标注GmagPmTwp
得到系统未校正前的伯德图如图6所示。
图6系统未校正前的伯德图
图5、图6分别为系统未校正前的闭环根轨迹和伯德图,由这两张图可看出系统处于非稳定状态。
2.3系统的串联PD校正
在改善二阶系统性能的方法中,比例-微分控制和测速反馈控制是两种常用的控制方法。
比例-微分(PD)控制是一种早期控制,可在出现位置误差前提前产生修正作用,从而达到改善系统性能的目的。
在此次课程设计中要求用串联比例-微分(PD)控制器改善倒立摆系统性能。
因为微分控制作用只对动态过程起作用,而对稳态过程没有影响,且对系统噪声非常敏感,所以单一的D控制器在任何情况下都不宜于被控对象串联起来单独使用,通常,微分控制规律总是与比例控制规律或比例-积分控制规律结合起来使用。
具有比例-微分控制规律的控制器,称为PD控制器,其输出m(t)与输入e(t)的关系如下式:
(2-1)
式中K为比例系数,T为微分时间常数。
K与T都是可调参数。
PD控制器如图7所示。
图7PD控制器的结构图
方框图如图8所示。
图8PD控制器方框图
PD控制规律中的微分控制规律能反映输入信号的变化趋势,产生有效的早期修正信号,以增加系统的阻尼程度,从而改善系统的稳定性。
在串联校正时,可使系统增加一个
的开环零点,使系统的相角裕度提高,因此有助于系统动态性能的改善。
经计算校正后系统开环传递函数为
(2-2)
根据典型二阶系统的暂态性能指标
由二阶系统阻尼比
和自然震荡频率
的计算方法:
,计算得
由反馈系统闭环传递函数的计算方法得系统的闭环传递函数
对照公式
根据典型二阶系统的数学模型得:
,所以
,修正K、T的值,取
得
,应用Matlab求出系统校正后的超调量
和调节时间
,编写程序如下:
ays=ef([324],[0.7311]);
%系统建模
%计算峰值时间p和对应最大超调量Mp
C=dcgain(ays)%取系统终值
[y,t]=step(ays);
%求取单位阶跃响应,返回变量输出y和时间t
[Y,k]=max(y);
%求输出响应的最大值Y(即峰值)和位置k
p=t(k)%取峰值时间
Mp=(Y-C)/C%计算最大超调量
%计算上升时间tr
n=1;
whiley(n)<
C%循环求取第一次到达终值时的时间
n=n+1;
end
tr=t(n)
%计算调节时间(误差带取2%)
i=length(t);
%求取仿真时间t序列的长度
while(y(i)>
0.98*C)&
(y(i)<
1.02*C)
i=i-1;
end
ts=t(i)
其结果如下:
C=2.1818p=0.7912s
Mp=0.1561tr=0.4945s
ts=1.7802s
系统的阶跃响应图形如图9所示。
图9系统校正后的阶跃响应图
根据以上计算得,校正后的系统暂态指标为:
,即所设计的PD校正满足系统要求。
编写MATLAB代码可以画出校正后系统的根轨迹,程序代码为:
num=[314];
den=[0.70-3];
%定义分母多项式
rlocus(num,den);
xlabel('
),ylabel('
%给坐标轴加上说明
%给图形加上
校正后系统的根轨迹曲线如图10所示。
图10校正后系统的根轨迹图
编写MATLAB代码画出已校正系统的伯德图,程序代码为:
num=[314];
den=[0.70-3];
s1=tf(num,den);
%给开换系统模型对象s1绘制伯德图并在图上标注GmwgPmwp
运行程序后得到校正后系统的伯德图如图11所示。
图11校正后系统的伯德图
分析系统校正前后的根轨迹图可知,经过校正后系统增加了一个开环零点,稳定性得到很大程度的改善,分析校正前后系统的伯德图得知,校正后系统的相角裕度由原来不稳定的无穷变为47rad,幅值裕度由22.3dB变为-13.4dB,由以上分析得知,系统经校正稳定性比原来提高。
3校正前系统与校正后系统的比较
通过加入比例-微分(PD)控制器,我们得到了一个稳定的倒立摆系统,比例-微分(PD)控制器的串入,使得系统动态过程的超调量
下降由原来的不稳定时的无穷到校正后的15.61%,同时调节时间
缩短至1.7802s;
值得注意的是串入比例-微分(PD)控制器后除了
增加了一个开环零点
,开环增益K保持不变,可见比例-微分校正环节的引入并不影响
系统的稳态精度,同时也不改变系统的无阻尼振荡频率
。
由于稳态误差与开环增益成反比,因此适当选择开环增益和微分器的时间常数T,既可减小稳态误差,又可获得良好的动态性能。
4心得体会
这次自动控制理论课程设计,不仅对课堂上的知识很好的温习了,还加强了我的动手、思考和解决问题的能力。
通过参加这次自动控制理论的课程设计,我学到了很多无法在课堂上学到的知识。
在课堂上我们学习的都是理论知识,而课程设计是锻炼我们把那些理论运用到我们实际的生活中。
作为一名学习自动化的大三学生,我觉得能做类似的课程设计师十分有意义的,而且是十分必要的。
这几天的课程设计让我明白理论知识运用到实践中来有一定的难度,但现实生活中却无处不体现了自动控制理论知识。
大二也做过类似的课程设计,这次课程设计运用了一些学习软件,让我了解并深入的明白了这些软件的用途。
在现代众多的领域中,自动控制技术起着越来越重要的作用。
随着电子技术和计算机技术的发展和应用,自动控制原理的应用越来越广泛,在宇航、机器人控制、导弹制导以及核动力灯高新技术领域中,自动控制技术起着关键作用。
现在学好自动控制原理,好好的理论联系实际,将来才能为我国的自动化发展做出贡献。
今天我们越来越多的利用计算机仿真技术做一些研究的仿真和测试,现在的研究离不开计算机仿真技术。
通过本次课程设计我学会了使用当前最强大、最流行、最好的仿真建模软件MATLAB,通过MATLAB中的工具SIMULINK我们可以很简单的仿真出一些基本的控制系统。
SIMULINK中的仿真形象生动,以绘图为主代码为辅,而其软件本身包含很多库函数和库模型,使得分析系统的输出相应和动态性能等十分简单。
我们只要简单的画出系统的结构框图,设置好相应的参数就可以分析系统,分析结果十分精确,使得复杂的数学计算好像是画画一样简单,大大提高了效率。
在自动控制原理课上,我们接触到的全是理论的知识,而且作为经典理论的一个分支,自动控制原理给我们的全是文字型的知识,在学习过程中很少解决实际的问题,也很少应用软件进行仿真计算,经过这次课程设计,在进一步了解熟悉课程知识的基础上,应用了MATLAB对整个系统的分析校正进行了分析,使我更加熟练地掌握了这门课程。
参考文献
[1]王正林,王胜开,陈国顺,王琪编著.与控制系统仿真[M],北京:
电子工业出版社,2008.7
[2]曾志新,邹海明,李伟光,等.倒立摆的建模及MATLAB仿真[J].新技术新工艺,2005,10:
16-18
[3]MohandMokhtari,MichelMarie.赵彦玲,吴淑红.译.MATLAB与SIMULINK工程应用[M],北京:
电子工业出版社,2002
[4]刘金琨.先进PID控制及其MATLAB仿真[M].北京:
电子工业出版社,2003
[5]吴楠.单级倒立摆系统角运动控制方案建模及仿真[J].系统仿真学报,2003,(11):
1290-1293
[6]班晓军.倒立摆得的一种FUZZY-PD复合控制器设计[J].哈尔滨工业大学学报,2003,(11),1290-1293
[7]胡寿松.自动控制原理(第五版).北京:
科学出版社,2007
本科生课程设计成绩评定表
姓名
性别
男
专业、班级
课程设计题目:
课程设计答辩或质疑记录:
成绩评定依据:
评定项目
评分成绩
1.选题合理、目的明确(10分)
2.设计方案正确、具有可行性、创新性(20分)
3.设计结果(20分)
4.态度认真、学习刻苦、遵守纪律(15分)
5.设计报告的规范化、参考文献充分(不少于5篇)(10分)
6.答辩(25分)
总分
最终评定成绩(以优、良、中、及格、不及格评定)
指导教师签字:
年月日
 升级会员
升级会员 