线性系统理论期中大作业.docx
《线性系统理论期中大作业.docx》由会员分享,可在线阅读,更多相关《线性系统理论期中大作业.docx(14页珍藏版)》请在冰点文库上搜索。
线性系统理论期中大作业
线性系统理论期中大作业
在下列问题中选择一个问题,完成如下工作:
1)建立系统的状态空间模型;
2)分析开环系统的运动规律,并仿真其状态轨迹;
3)分析系统的能控能观性;
4)分析开环系统的稳定性
问题一:
DCMotorSpeedControl
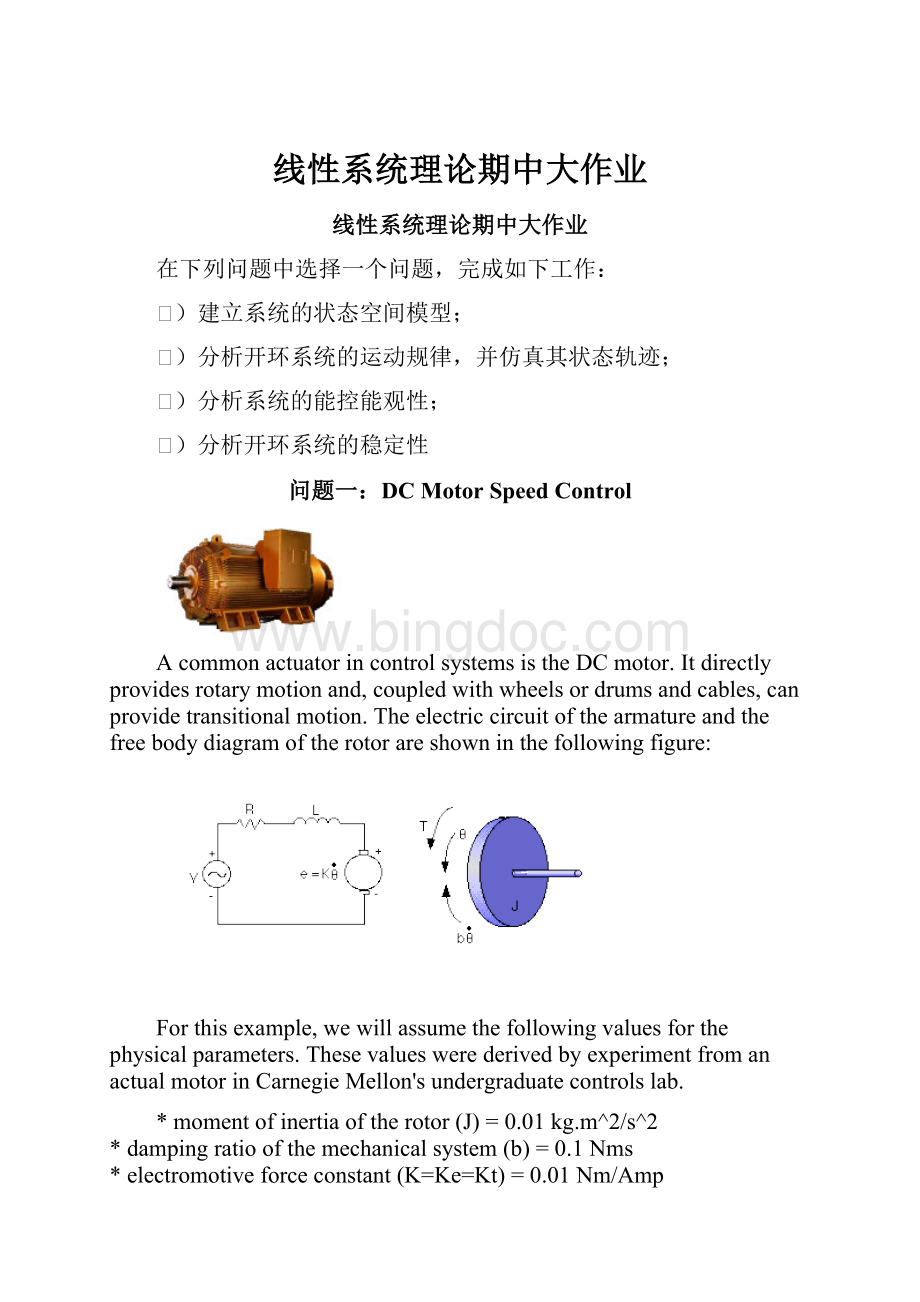
AcommonactuatorincontrolsystemsistheDCmotor.Itdirectlyprovidesrotarymotionand,coupledwithwheelsordrumsandcables,canprovidetransitionalmotion.Theelectriccircuitofthearmatureandthefreebodydiagramoftherotorareshowninthefollowingfigure:
Forthisexample,wewillassumethefollowingvaluesforthephysicalparameters.ThesevalueswerederivedbyexperimentfromanactualmotorinCarnegieMellon'sundergraduatecontrolslab.
*momentofinertiaoftherotor(J)=0.01kg.m^2/s^2
*dampingratioofthemechanicalsystem(b)=0.1Nms
*electromotiveforceconstant(K=Ke=Kt)=0.01Nm/Amp
*electricresistance(R)=1ohm
*electricinductance(L)=0.5H
*input(V):
SourceVoltage
*output(theta):
positionofshaft
*Therotorandshaftareassumedtoberigid
Themotortorque,T,isrelatedtothearmaturecurrent,i,byaconstantfactorKt.Thebackemf,e,isrelatedtotherotationalvelocitybythefollowingequations:
InSIunits(whichwewilluse),Kt(armatureconstant)isequaltoKe(motorconstant).
FromthefigureabovewecanwritethefollowingequationsbasedonNewton'slawcombinedwithKirchhoff'slaw:
问题二:
DCMotorPositionControl
AcommonactuatorincontrolsystemsistheDCmotor.Itdirectlyprovidesrotarymotionand,coupledwithwheelsordrumsandcables,canprovidetransitionalmotion.Theelectriccircuitofthearmatureandthefreebodydiagramoftherotorareshowninthefollowingfigure:
Forthisexample,wewillassumethefollowingvaluesforthephysicalparameters.ThesevalueswerederivedbyexperimentfromanactualmotorinCarnegieMellon'sundergraduatecontrolslab.
*momentofinertiaoftherotor(J)=3.2284E-6kg.m^2/s^2
*dampingratioofthemechanicalsystem(b)=3.5077E-6Nms
*electromotiveforceconstant(K=Ke=Kt)=0.0274Nm/Amp
*electricresistance(R)=4ohm
*electricinductance(L)=2.75E-6H
*input(V):
SourceVoltage
*output(theta):
positionofshaft
*Therotorandshaftareassumedtoberigid
Themotortorque,T,isrelatedtothearmaturecurrent,i,byaconstantfactorKt.Thebackemf,e,isrelatedtotherotationalvelocitybythefollowingequations:
InSIunits(whichwewilluse),Kt(armatureconstant)isequaltoKe(motorconstant).
FromthefigureabovewecanwritethefollowingequationsbasedonNewton'slawcombinedwithKirchhoff'slaw:
问题三:
InvertedPendulum
Thecartwithaninvertedpendulum,shownbelow,is"bumped"withanimpulseforce,F.Determinethedynamicequationsofmotionforthesystem,andlinearizeaboutthependulum'sangle,theta=Pi(inotherwords,assumethatpendulumdoesnotmovemorethanafewdegreesawayfromthevertical,chosentobeatanangleofPi).Findacontrollertosatisfyallofthedesignrequirementsgivenbelow.
Forthisexample,let'sassumethat
M
massofthecart
0.5kg
m
massofthependulum
0.5kg
b
frictionofthecart
0.1N/m/sec
l
lengthtopendulumcenterofmass
0.3m
I
inertiaofthependulum
0.006kg*m^2
F
forceappliedtothecart
x
cartpositioncoordinate
theta
pendulumanglefromvertical
ForthePID,rootlocus,andfrequencyresponsesectionsofthisproblemwewillbeonlyinterestedinthecontrolofthependulumsposition.Thisisbecausethetechniquesusedinthesetutorialscanonlybeappliedforasingle-input-single-output(SISO)system.Therefore,noneofthedesigncriteriadealwiththecart'sposition.Forthesesectionswewillassumethatthesystemstartsatequilibrium,andexperiencesanimpulseforceof1N.Thependulumshouldreturntoitsuprightpositionwithin5seconds,andnevermovemorethan0.05radiansawayfromthevertical.
Thedesignrequirementsforthissystemare:
∙Settlingtimeoflessthan5seconds.
∙Pendulumanglenevermorethan0.05radiansfromthevertical.
However,withthestate-spacemethodwearemorereadilyabletodealwithamulti-outputsystem.Therefore,forthissectionoftheInvertedPendulumexamplewewillattempttocontrolboththependulum'sangleandthecart'sposition.Tomakethedesignmorechallengingwewillbeapplyingastepinputtothecart.Thecartshouldachieveit'sdesiredpositionwithin5secondsandhavearisetimeunder0.5seconds.Wewillalsolimitthependulum'sovershootto20degrees(0.35radians),anditshouldalsosettleinunder5seconds.
ThedesignrequirementsfortheInvertedPendulumstate-spaceexampleare:
∙Settlingtimeforxandthetaoflessthan5seconds.
∙Risetimeforxoflessthan0.5seconds.
∙Overshootofthetalessthan20degrees(0.35radians).
Forceanalysisandsystemequations
BelowarethetwoFreeBodyDiagramsofthesystem.
SummingtheforcesintheFreeBodyDiagramofthecartinthehorizontaldirection,yougetthefollowingequationofmotion:
Notethatyoucouldalsosumtheforcesintheverticaldirection,butnousefulinformationwouldbegained.
SummingtheforcesintheFreeBodyDiagramofthependuluminthehorizontaldirection,youcangetanequationforN:
Ifyousubstitutethisequationintothefirstequation,yougetthefirstequationofmotionforthissystem:
(1)
Togetthesecondequationofmotion,sumtheforcesperpendiculartothependulum.Solvingthesystemalongthisaxisendsupsavingyoualotofalgebra.Youshouldgetthefollowingequation:
TogetridofthePandNtermsintheequationabove,sumthemomentsaroundthecentroidofthependulumtogetthefollowingequation:
Combiningtheselasttwoequations,yougettheseconddynamicequation:
(2)
SinceMatlabcanonlyworkwithlinearfunctions,thissetofequationsshouldbelinearizedabouttheta=Pi.Assumethattheta=Pi+ø(ørepresentsasmallanglefromtheverticalupwarddirection).Therefore,cos(theta)=-1,sin(theta)=-ø,and(d(theta)/dt)^2=0.Afterlinearizationthetwoequationsofmotionbecome(whereurepresentstheinput):
问题四:
BusSuspensionSystem
Designinganautomaticsuspensionsystemforabusturnsouttobeaninterestingcontrolproblem.Whenthesuspensionsystemisdesigned,a1/4busmodel(oneofthefourwheels)isusedtosimplifytheproblemtoaonedimensionalspring-dampersystem.Adiagramofthissystemisshownbelow:
Where:
*bodymass(m1)=2500kg,
*suspensionmass(m2)=320kg,
*springconstantofsuspensionsystem(k1)=80,000N/m,
*springconstantofwheelandtire(k2)=500,000N/m,
*dampingconstantofsuspensionsystem(b1)=350Ns/m.
*dampingconstantofwheelandtire(b2)=15,020Ns/m.
*controlforce(u)=forcefromthecontrollerwearegoingtodesign.
Designrequirements:
Agoodbussuspensionsystemshouldhavesatisfactoryroadholdingability,whilestillprovidingcomfortwhenridingoverbumpsandholesintheroad.Whenthebusisexperiencinganyroaddisturbance(i.e.potholes,cracks,andunevenpavement),thebusbodyshouldnothavelargeoscillations,andtheoscillationsshoulddissipatequickly.SincethedistanceX1-Wisverydifficulttomeasure,andthedeformationofthetire(X2-W)isnegligible,wewillusethedistanceX1-X2insteadofX1-Wastheoutputinourproblem.Keepinmindthatthisisanestimation.
Theroaddisturbance(W)inthisproblemwillbesimulatedbyastepinput.Thisstepcouldrepresentthebuscomingoutofapothole.Wewanttodesignafeedbackcontrollersothattheoutput(X1-X2)hasanovershootlessthan5%andasettlingtimeshorterthan5seconds.Forexample,whenthebusrunsontoa10cmhighstep,thebusbodywilloscillatewithinarangeof5mmandreturntoasmoothridewithin5seconds.
Equationsofmotion:
FromthepictureaboveandNewton'slaw,wecanobtainthedynamicequationsasthefollowing:
问题五:
CruiseControlSystem
Themodelofthecruisecontrolsystemisrelativelysimple.Iftheinertiaofthewheelsisneglected,anditisassumedthatfriction(whichisproportionaltothecar'sspeed)iswhatisopposingthemotionofthecar,thentheproblemisreducedtothesimplemassanddampersystemshownbelow.
UsingNewton'slaw,modelingequationsforthissystembecomes:
(1)
whereuistheforcefromtheengine.Forthisexample,let'sassumethat
m=1000kg
b=50Nsec/m
u=500N
Designrequirements
Thenextstepinmodelingthissystemistocomeupwithsomedesigncriteria.Whentheenginegivesa500Newtonforce,thecarwillreachamaximumvelocityof10m/s(22mph).Anautomobileshouldbeabletoaccelerateuptothatspeedinlessthan5seconds.Sincethisisonlyacruisecontrolsystem,a10%overshootonthevelocitywillnotdomuchdamage.A2%steady-stateerrorisalsoacceptableforthesamereason.
Keepingtheaboveinmind,wehaveproposedthefollowingdesigncriteriaforthisproblem:
Risetime<5sec
Overshoot<10%
Steadystateerror<2%
问题六:
APitchController
Physicalsetupandsystemequations
Theequationsgoverningthemotionofanaircraftareaverycomplicatedsetofsixnon-linearcoupleddifferentialequations.However,undercertainassumptions,theycanbedecoupledandlinearizedintothelongitudinalandlateralequations.Pitchcontrolisalongitudinalproblem,andinthisexample,wewilldesignanautopilotthatcontrolsthepitchofanaircraft.
Thebasiccoordinateaxesandforcesactingonanaircraftareshowninthefigurebelow:
Assumethattheaircraftisinsteady-cruiseatconstantaltitudeandvelocity;thus,thethrustanddragcanceloutandtheliftandweightbalanceouteachother.Also,assumethatch
 升级会员
升级会员 