GPS模块在便携式导航系统中的应用Word下载.docx
《GPS模块在便携式导航系统中的应用Word下载.docx》由会员分享,可在线阅读,更多相关《GPS模块在便携式导航系统中的应用Word下载.docx(6页珍藏版)》请在冰点文库上搜索。
导航卫星至少24颗,均匀分布在6个极地轨道上,轨道的夹角为60度,距地平均高度为20200公里,每12恒星时绕地球一周。
GPS信号接收机的任务主要是捕获一定卫星高度截止角所选择的待测卫星的信号,并跟踪这些卫星的运行,同时对所接收到的GPS信号进行变换、放大和处理,以便测量出GPS信号从卫星到接收机天线的传播时间,解译出GPS卫星所发送的导航电文,最终实时计算出现测站的三维位置、位置、甚至三维速度和时间。
静态定位时,GPS接收机在捕获和跟踪GPS卫星的过程中固定不变,接收机通过高精度测量GPS信号的传播时间,并利用GPS卫星在轨的已知位置解算出接收机天线所在位置的三维坐标。
而动态定位则是用GPS接收机测定一个运动物体的运行轨迹。
GPS信号接收机所在的运动物体叫做载体。
由于载体上的GPS接收机天线在跟踪GPS卫星的过程中将相对地球而运动,这样,接收机用GPS信号就可实时地测量运动载体的状态参数。
接收机硬件、机内软件以及GPS数据的后处理软件包构成了完整的GPS用户设备。
GPS接收机的结构分为天线单元和接收单元两大部分。
对于测地型接收机来说,两个单元一般分成两个独立的部件,观测时将天线单元安置在测站上,接收单元则置于测站附近的适当地方,并用电缆线将两者连接成一个整机。
实际上,也可以将天线单元和接收单元制作成一个整体,而在观测时将其安置在测站点上。
GPS接收机一般用蓄电池做电源,同时采用机内机外两种直流电源。
设置机内电池的目的在于更换外电池时不中断连续观测。
在用机外电池的过程中,机内电池自动充电。
关机后,机内电池为RAM存储器供电,以防丢失数据。
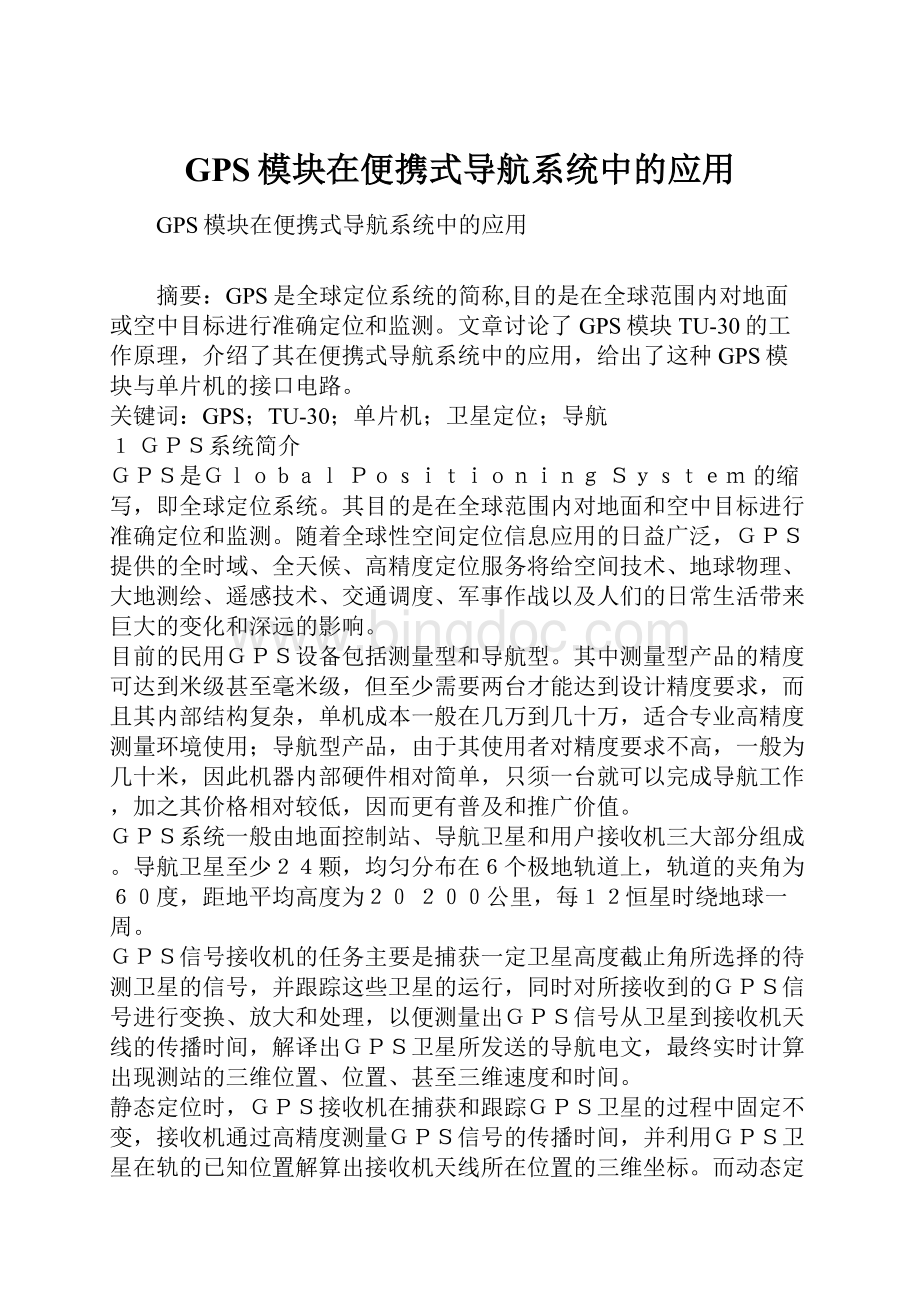
2 TU-30GPS模块简介
TU-30模块是美国罗克韦尔公司的GPS产品,其特点是体积小、接口简单、可靠性好。
模块的组织结构是一个用于接收GPS信号的单片机小系统。
GPS信号接收部分由Rockwell自行设计开发的芯片及其外围电路组成。
其控制内核是一个DSP处理器,该处理器具有很强的数据运算处理能力,并有两个串口和时钟输出;
外围电路有实时时钟,并带有E2PROM、SRAM、ROM等存储器,可对相关重要信息数据进行存储、交换;
此外,还留有DGPS接口。
该模块的卫星采集启动方式分为4种模式:
热启动方式、初始启动方式、冷启动方式、冻结启动方式;
而导航模式则有3维模式、2维模式和DG-PS模式3种。
图1所示是该模块的硬件结构。
TU-30GPS模块留有天线接口,可以用同轴电缆与天线进行连接,天线可延长30米。
此外,它还留有20Pin应用接口,可方便地与单片机、PC机等设备进行接口。
表1TU-30GPS的模块中的20针接口定义接口功能Pin1前置放大电源输入Pin25V电源输入Pin3电池电源输入Pin5主复位输入Pin7NMEA协议选择Pin8ROM默认选择Pin11串口1数据输出Pin12串口1数据输入Pin14串口2数据输出Pin15串口2数据输入Pin191PPS时间标志输出Pin2010kHz时钟输出Pin4,6,9,17无连接NCPin10,13,16,18接地
3 GPS模块的串行数据接口规范
GPS模块的应用关键在于串口通信协议的制定,也就是模块的相关输入输出协议格式。
它主要包括数据类型与信息格式,其中数据类型主要有二进制信息和NMEA全国海洋电子学会数据信息。
这两类信息可以通过串口与GPS接收机进行通信。
这里重点介绍TU-30的二进制信息字格式与字结构。
TU-30的传输速率为9600bps,无奇偶校验,有8位数据位,1位停止位。
其二进制信息字格式包括信息头、头校验、数据、数据校验等。
TU-30中的每个信息都有头,但不一定有数据,信息的应答和请求以头的形式完成。
二进制信息头通常由如下五个字组成
Word1:
1000000111111111;
Word2:
信息ID;
Word3:
数据子计数;
Word4:
应答/无应答;
Word5:
头校验。
头校验计算公式为
一般情况下,二进制信息数据由如下4个字组成
Word6:
触发;
Word7:
间隔;
Word8:
偏移量;
Word9:
数据校验。
TU-30中的每个字均为16位,有无符号整型和有符号整形之分。
按字长又可分为单精度、双精度和三精度。
保留位输入时为0,独立定义位域标志位时可为0或1。
TU-30中的输出信息
信息位置状态输出;
信息ID为1000,信息长度为55个字;
ECEF状态输出:
信息ID为1001,信息长度为54个字;
通道摘要信息ID为1002,信息长度为51个字;
通道测量信息ID为1007,信息长度为154个字;
…
用户设置输出:
信息ID为1012,信息长度为22个字;
内建测试结果:
信息ID为1100,信息长度为20个字;
测量时间标记:
信息ID为1102,信息长度为253个字;
串口通信参数:
信息ID为1130,信息长度为21个字;
EEPROM状态:
信息ID为1136,信息长度为18个字。
下面是TU-30的输入信息描述
测量位置和速度初始化:
信息ID为1200,信息长度为27个字。
现以此为例来介绍各信息字的具体含义
字1~4:
信息头;
5:
头校验;
6:
序列号;
7:
初始化控制;
8~16:
GPS时间、日期;
17~18:
纬度;
19~20:
经度;
21~22:
高度;
23~24:
对地速度;
25:
卫星轨道仰角;
26:
爬升率;
27:
下面是TU-30的其它信息,其具体内容可参见相关文档。
用户数据定义:
信息ID为1210,信息长度为20个字;
地图选择信息数据:
信息ID为1211,信息长度为8个字;
卫星仰角屏蔽控制:
信息ID为1212,信息长度为8个字;
卫星选择:
信息ID为1213,信息长度为10个字;
差动GPS控制:
信息ID为1214,信息长度为9个字;
冷起动控制:
信息ID为1216,信息长度为9个字;
定位方法校验标准:
信息ID为1217,信息长度为13个字;
无线类型选择:
信息ID为1218,信息长度为8个字;
用户登录高度输入:
信息ID为1219,信息长度为12个字;
应用平台控制:
信息ID为1220,信息长度为8个字;
串口通信参数信息:
信息ID为1221,信息长度为15个字;
导航配置信息
信息协议控制:
以上相关信息通常都保存到模块的EEPROM中。
4 与单片机构建的便携式导航系统
4.1硬件结构
设计时,通常将TU-30模块的串口1与单片机的串口相连接,模块与天线的连接可以加一级前置放大器。
天线可选用东芝天线,也可以专门定制。
可选用LCD屏显示经纬度、时间、高度等数据。
电源采用4节碱性电池,易于更换。
MCU可选用德州仪器的MSP430flash系列。
MSP430系列为16位单片机,处理速度快,功耗低,体积小,适合在便携式仪器上使用。
同时,MSP430单片机支持C语言,易于编程。
屏幕菜单采用字符型西文显示,可缩短开发时间、降低成本,很适合于民用;
也可以选用大屏幕彩色点阵液晶,它界面友好、美观,但软件工作量大,硬件成本高。
键盘可选择3个触摸键,菜单功能全部可用软件实现。
因为MSP430单片机的电源为3.3V而TU-30的电源为5V,所以需要用DC-DC电源转换模块进行处理。
如果采用充电电池则还需要充电电路。
GPS模块与单片机的接口原理如图2所示。
4.2软件设计
图3所示是TU-30GPS模块的软件流程图。
该软件的编写主要是设置GPS模块与MCU之间的串口通信、参数显示及人机接口。
主要包括初始化、串口通信、数据处理、故障提示、显示、键盘处理、电源管理等部分。
其中初始化包括MSP430中各种寄存器的配置、串口相关参数配置及外围电路的初始化等;
串口通信包括数据发送、接收、校验,通信故障提示等;
数据处理主要是对接收数据的解码、存储和数据刷新等;
故障提示包括设备故障、通信故障、电源故障等。
电源管理主要是电源欠压提示和当前电源状态显示。
另外,设计时还应注意GPS模块的天线要求,具体有以下两点
天线增益应为30dB,阻抗应为50Ω。
无线频率信号环境方面要求,即RF输入L1的载波频率应为10MHz,带宽中心点应为0dBW。
5 结束语
GPS导航设备的应用着重于多卫星系统、远距离监控以及多功能显示等方面。
使用多卫星系统进行导航定位时,卫星较多可保证实时定位的精度与可靠性。
此外,GPS定位还受GPS网的限制,应用GPS卫星定位技术建立的控制网叫GPS网。
归纳起来大致可分为两大类:
一类是全球或全国性的高精度GPS网,这类GPS网中相邻点的距离在数千公里至上万公里,其主要任务是作为全球高精度坐标框架或全国高精度坐标框架,以为全球性地球动力学和空间科学方面的科学研究工作服务。
另一类是区域性的GPS网,包括城市或矿区GPS网,GPS工程网等,这类网中的相邻点间的距离为几公里至几十公里,其主要任务是直接为国民经济建设服务。
 升级会员
升级会员 