三相异步电动机及其控制电路.docx
《三相异步电动机及其控制电路.docx》由会员分享,可在线阅读,更多相关《三相异步电动机及其控制电路.docx(22页珍藏版)》请在冰点文库上搜索。
三相异步电动机及其控制电路
第5章三相异步电动机及其控制线路
5.1三相异步电动机
实现电能与机械能相互转换的电工设备总称为电机。
电机是利用电磁感应原理实现电能与机械能的相互转换。
把机械能转换成电能的设备称为发电机,而把电能转换成机械能的设备叫做电动机。
在生产上主要用的是交流电动机,特别三相异步电动机,因为它具有结构简单、坚固耐用、运行可靠、价格低廉、维护方便等优点。
它被广泛地用来驱动各种金属切削机床、起重机、锻压机、传送带、铸造机械、功率不大的通风机及水泵等。
对于各种电动机我们应该了解下列几个方面的问题:
(1)基本构造;
(2)工作原理;(3)表示转速与转矩之间关系的机械特性;(4)起动、调速及制动的基本原理和基本方法;(5)应用场合和如何正确使用。
5.1.1三相异步电动机的结构与工作原理
1.三相异步电动机的构造
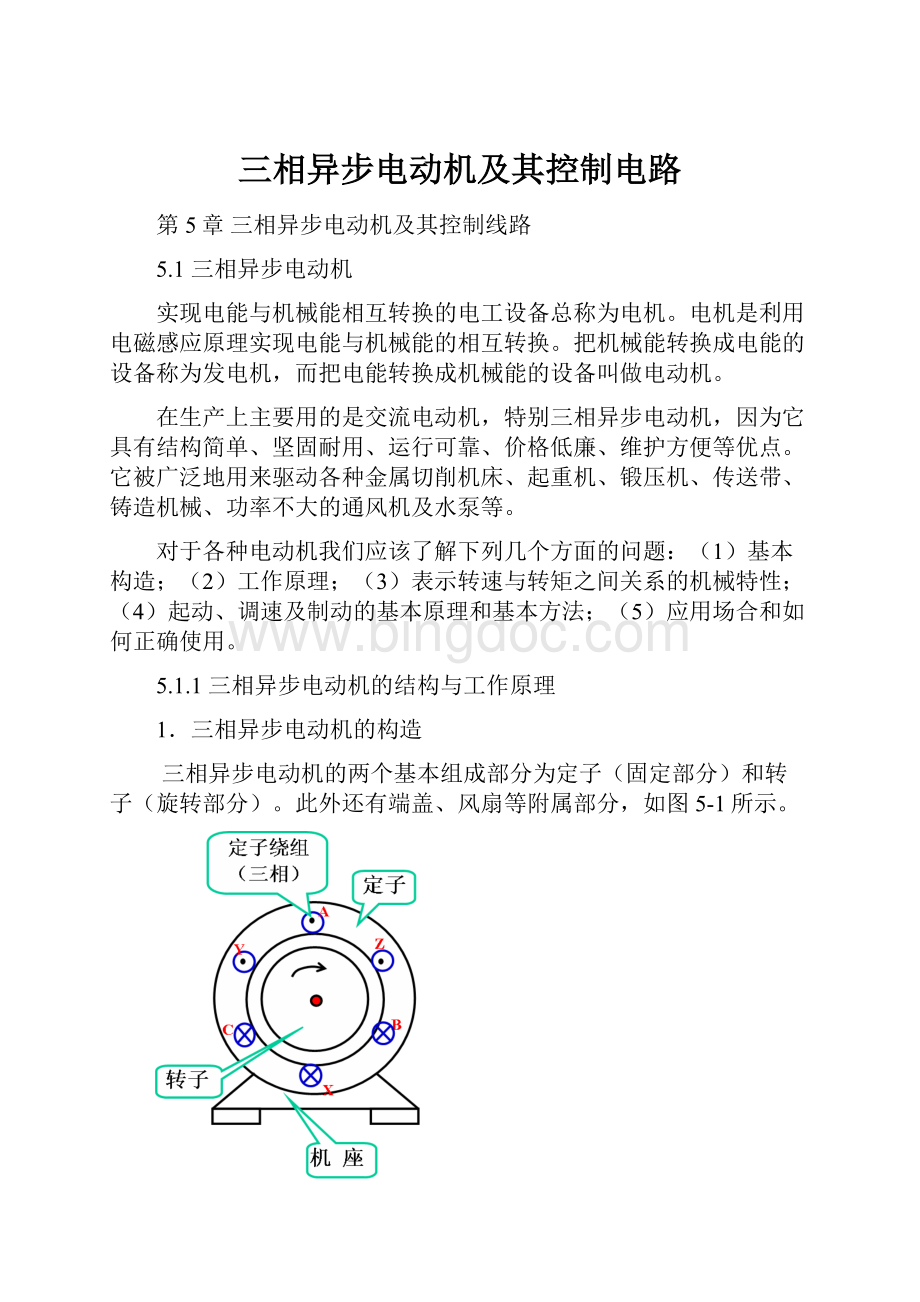
三相异步电动机的两个基本组成部分为定子(固定部分)和转子(旋转部分)。
此外还有端盖、风扇等附属部分,如图5-1所示。
图5-1三相电动机的结构示意图
1).定子
三相异步电动机的定子由三部分组成:
定子
定子铁心
由厚度为0.5mm的,相互绝缘的硅钢片叠成,硅钢片内圆上有均匀分布的槽,其作用是嵌放定子三相绕组AX、BY、CZ。
定子绕组
三组用漆包线绕制好的,对称地嵌入定子铁心槽内的相同的线圈。
这三相绕组可接成星形或三角形。
机座
机座用铸铁或铸钢制成,其作用是固定铁心和绕组
2).转子
三相异步电动机的转子由三部分组成:
转子
转子铁心
由厚度为0.5mm的,相互绝缘的硅钢片叠成,硅钢片外圆上有均匀分布的槽,其作用是嵌放转子三相绕组。
转子绕组
转子绕组有两种形式:
鼠笼式--鼠笼式异步电动机。
绕线式--绕线式异步电动机。
转轴
转轴上加机械负载
鼠笼式电动机由于构造简单,价格低廉,工作可靠,使用方便,成为了生产上应用得最广泛的一种电动机。
为了保证转子能够自由旋转,在定子与转子之间必须留有一定的空气隙,中小型电动机的空气隙约在0.2~1.0mm之间。
2.三相异步电动机的转动原理
1).基本原理
为了说明三相异步电动机的工作原理,我们做如下演示实验,如图5-2所示。
图5-2三相异步电动机工作原理
(1).演示实验:
在装有手柄的蹄形磁铁的两极间放置一个闭合导体,当转动手柄带动蹄形磁铁旋转时,将发现导体也跟着旋;若改变磁铁的转向,则导体的转向也跟着改变。
(2).现象解释:
当磁铁旋转时,磁铁与闭合的导体发生相对运动,鼠笼式导体切割磁力线而在其内部产生感应电动势和感应电流。
感应电流又使导体受到一个电磁力的作用,于是导体就沿磁铁的旋转方向转动起来,这就是异步电动机的基本原理。
转子转动的方向和磁极旋转的方向相同。
(3).结论:
欲使异步电动机旋转,必须有旋转的磁场和闭合的转子绕组。
2).旋转磁场
(1).产生
图5-3表示最简单的三相定子绕组AX、BY、CZ,它们在空间按互差1200的规律对称排列。
并接成星形与三相电源U、V、W相联。
则三相定子绕组便通过三相对称电流:
随着电流在定子绕组中通过,在三相定子绕组中就会产生旋转磁场(图5-4)。
图5-3三相异步电动机定子接线
当t=00时,
,AX绕组中无电流;
为负,BY绕组中的电流从Y流入B1流出;
为正,CZ绕组中的电流从C流入Z流出;由右手螺旋定则可得合成磁场的方向如图5-4(a)所示。
当t=1200时,
,BY绕组中无电流;
为正,AX绕组中的电流从A流入X流出;
为负,CZ绕组中的电流从Z流入C流出;由右手螺旋定则可得合成磁场的方向如图5-4(b)所示。
当t=2400时,
,CZ绕组中无电流;
为负,AX绕组中的电流从X流入A流出;
为正,BY绕组中的电流从B流入Y流出;由右手螺旋定则可得合成磁场的方向如图5-4(c)所示。
可见,当定子绕组中的电流变化一个周期时,合成磁场也按电流的相序方向在空间旋转一周。
随着定子绕组中的三相电流不断地作周期性变化,产生的合成磁场也不断地旋,因此称为旋转磁场。
图5-4旋转磁场的形成
(2).旋转磁场的方向
旋转磁场的方向是由三相绕组中电流相序决定的,若想改变旋转磁场的方向,只要改变通入定子绕组的电流相序,即将三根电源线中的任意两根对调即可。
这时,转子的旋转方向也跟着改变。
3).三相异步电动机的极数与转速
(1).极数(磁极对数p)
三相异步电动机的极数就是旋转磁场的极数。
旋转磁场的极数和三相绕组的安排有关。
当每相绕组只有一个线圈,绕组的始端之间相差1200空间角时,产生的旋转磁场具有一对极,即p=1;
当每相绕组为两个线圈串联,绕组的始端之间相差600空间角时,产生的旋转磁场具有两对极,即p=2;
同理,如果要产生三对极,即p=3的旋转磁场,则每相绕组必须有均匀安排在空间的串联的三个线圈,绕组的始端之间相差400(=1200/p)空间角。
极数p与绕组的始端之间的空间角的关系为:
(2).转速n
三相异步电动机旋转磁场的转速n0与电动机磁极对数p有关,它们的关系是:
(5-1)
由(5-1)可知,旋转磁场的转速n0决定于电流频率f1和磁场的极数p。
对某一异步电动机而言,f1和p通常是一定的,所以磁场转速n0是个常数。
在我国,工频f1=50Hz,因此对应于不同极对数p的旋转磁场转速n0,见表5-1
表5-1
p
1
2
3
4
5
6
n0
3000
1500
1000
750
600
500
(3).转差率s
电动机转子转动方向与磁场旋转的方向相同,但转子的转速n不可能达到与旋转磁场的转速n0相等,否则转子与旋转磁场之间就没有相对运动,因而磁力线就不切割转子导体,转子电动势、转子电流以及转矩也就都不存在。
也就是说旋转磁场与转子之间存在转速差,因此我们把这种电动机称为异步电动机,又因为这种电动机的转动原理是建立在电磁感应基础上的,故又称为感应电动机。
旋转磁场的转速n0常称为同步转速。
转差率s——用来表示转子转速n与磁场转速n0相差的程度的物理量。
即:
(5-2)
转差率是异步电动机的一个重要的物理量。
当旋转磁场以同步转速n0开始旋转时,转子则因机械惯性尚未转动,转子的瞬间转速n=0,这时转差率S=1。
转子转动起来之后,n>0,(n0-n)差值减小,电动机的转差率S<1。
如果转轴上的阻转矩加大,则转子转速n降低,即异步程度加大,才能产生足够大的感受电动势和电流,产生足够大的电磁转矩,这时的转差率S增大。
反之,S减小。
异步电动机运行时,转速与同步转速一般很接近,转差率很小。
在额定工作状态下约为0.015~0.06之间。
根据式(4-2),可以得到电动机的转速常用公式
(5-3)
例有一台三相异步电动机,其额定转速n=975r/min,电源频率f=50Hz,求电动机的极数和额定负载时的转差率S。
解:
由于电动机的额定转速接近而略小于同步转速,而同步转速对应于不同的极对数有一系列固定的数值。
显然,与975r/min最相近的同步转速n0=1000r/min,与此相应的磁极对数p=3。
因此,额定负载时的转差率为:
(4).三相异步电动机的定子电路与转子电路
三相异步电动机中的电磁关系同变压器类似,定子绕组相当于变压器的原绕组,转子绕组(一般是短接的)相当于副绕组。
给定子绕组接上三相电源电压,则定子中就有三相电流通过,此三相电流产生旋转磁场,其磁力线通过定子和转子铁心而闭合,这个磁场在转子和定子的每相绕组中都要感应出电动势。
总结:
1、三相异步电动机的两个基本组成部分为定子(固定部分)和转子(旋转部分)。
2、欲使异步电动机旋转,必须有旋转的磁场和闭合的转子绕组,并且旋转的磁场和闭合的转子绕组的转速不同,这也是“异步”二字的含义;
3、三相电源流过在空间互差一定角度按一定规律排列的三相绕组时,便会产生旋转磁场;
4、旋转磁场的方向是由三相绕组中电源相序决定的;
5、三相异步电动机旋转磁场的转速n0与电动机磁极对数p有关,它们的关系是:
6、转差率s——用来表示转子转速n与磁场转速n0相差的程度的物理量。
即:
转差率是异步电动机的一个重要的物理量,异步电动机运行时,转速与同步转速一般很接近,转差率很小。
在额定工作状态下约为0.015~0.06之间。
7、三相异步电动机中的电磁关系同变压器类似,定子绕组相当于变压器的原绕组,转子绕组(一般是短接的)相当于副绕组。
5.1.2三相异步电机的转矩特性与机械特性
1.电磁转矩(简称转矩)
异步电动机的转矩T是由旋转磁场的每极磁通与转子电流I2相互作用而产生的。
电磁转矩的大小与转子绕组中的电流I及旋转磁场的强弱有关。
经理论证明,它们的关系是:
(5-4)
其中T为电磁转矩KT为与电机结构有关的常数
为旋转磁场每个极的磁通量I2为转子绕组电流的有效值
2为转子电流滞后于转子电势的相位角
若考虑电源电压及电机的一些参数与电磁转矩的关系,(5-4)修正为:
(5-5)
其中
为常数U1为定子绕组的相电压
S为转差率R2为转子每相绕组的电阻
X20为转子静止时每相绕组的感抗
由上式可知,转矩T还与定子每相电压U1的平方成比例,所以当电源电压有所变动时,对转矩的影响很大。
此外,转矩T还受转子电阻R2的影响。
图4-15为异步电动机的转矩特性曲线。
2.机械特性曲线
图5-5三相异步电动机的机械特性曲线
在一定的电源电压U1和转子电阻R2下,电动机的转矩T与转差率n之间的关系曲线T=f(s)或转速与转矩的关系曲线n=f(T),称为电动机的机械特性曲线,它可根据式(5-4)得出,如图5-5所示。
在机械特性曲线上我们要讨论三个转矩:
1).额定转矩TN
额定转矩TN是异步电动机带额定负载时,转轴上的输出转矩。
(5-6)
式中P2是电动机轴上输出的机械功率,其单位是瓦特,n的单位是转/分,TN的单位是牛·米。
当忽略电动机本身机械摩擦转矩T0时,阻转矩近似为负载转矩TL,电动机作等速旋转时,电磁转矩T必与阻转矩TL相等,即T=TL。
额定负载时,则有TN=TL。
2).最大转矩Tm
Tm又称为临界转矩,是电动机可能产生的最大电磁转矩。
它反映了电动机的过载能力。
最大转矩的转差率为Sm,此时的Sm叫做临界转差率,见图5-5(a)
最大转矩Tm与额定转矩TN之比称为电动机的过载系数,即
=Tm/TN
一般三相异步的过载系数在1.82.2之间。
在选用电动机时,必须考虑可能出现的最大负载转矩,而后根据所选电动机的过载系数算出电动机的最大转矩,它必须大于最大负载转矩。
否则,就是重选电动机。
3).起动转矩Tst,
Tst为电动机起动初始瞬间的转矩,即n=0,s=1时的转矩。
为确保电动机能够带额定负载起动,必须满足:
TstTN,一般的三相异步电动机有Tst/TN=12.2。
3.电动机的负载能力自适应分析
电动机在工作时,它所产生的电磁转矩T的大小能够在一定的范围内自动调整以适应负载的变化,这种特性称为自适应负载能力。
直至新的平衡。
此过程中,
时,
电源提供的功率自动增加。
总结:
1、电磁转矩T的大小与转子绕组中的电流I及旋转磁场的强弱有关。
转矩T还与定子每相电压U1的平方成比例,所以当电源电压有所变动时,对转矩的影响很大。
此外,转矩T还受转子电阻R2的影响。
2、在一定的电源电压U1和转子电阻R2下,电动机的转矩T与转差率n之间的关系曲线T=f(s)或转速与转矩的关系曲线n=f(T),称为电动机的机械特性曲线。
其特性见图5-5
3、三个转矩:
1).额定转矩TN
额定转矩TN是异步电动机带额定负载时,转轴上的输出转矩。
2).最大转矩Tm
Tm又称为临界转矩,是电动机可能产生的最大电磁转矩。
它反映了电动机的过载能力。
3).起动转矩Tst,
Tst为电动机起动初始瞬间的转矩,即n=0,s=1时的转矩。
4、电动机的负载能力自适应分析
电动机在工作时,它所产生的电磁转矩T的大小能够在一定的范围内自动调整以适应负载的变化,这种特性称为自适应负载能力。
5.2.三相异步电动机的使用
电动机或其他电气设备电路的接通或断开,目前普遍采用继电器、接触器、按钮及开关等控制电器来组成控制系统。
这种控制系统一般称为继电——接触器控制系统。
任何复杂的控制电路,都是由一些基本的单元电路组成的。
因此,在本节中我们主要讨论继电——接触器控制的一些基本电路。
要弄清一个控制电路的原理,必须了解其中各个电器元件的结构,动作原理以及它们的控制作用。
电器的种类繁多,可分为手动的和自动的两类。
手动电器是由工作人员手动操纵的,例如刀开关、点火开关等。
而自动电器则是按照指令、信号或某个物理量的变化而自动动作的,例如各种继电器、接触器、电磁阀等。
因此本节首先对这些常用控制电器作简单介绍。
5.2.1.常用低压电器介绍
1.手动电器
1).刀开关
Ø刀开关又叫闸刀开关,一般用于不频繁操作的低压电路中,用作接通和切断电源,有时也用来控制小容量电动机的直接起动与停机。
Ø刀开关由闸刀(动触点)、静插座(静触点)、手柄和绝缘底板等组成。
Ø刀开关的种类很多。
按极数(刀片数)分为单极、双极和三极;按结构分为平板式和条架式;按操作方式分为直接手柄操作式、杠杆操作机构式和电动操作机构式;按转换方向分为单投和双投等。
图5-6刀开关的电路符号
Ø刀开关一般与熔断器串联使用,以便在短路或过负荷时熔断器熔断而自动切断电路。
Ø刀开关的额定电压通常为250V和500V,额定电流在1500A以下。
Ø
考虑到电机较大的起动电流,刀闸的额定电流值应如下选择:
3~5倍异步电机额定电流
2).按钮
按钮常用于接通、断开控制电路,它的结构和电路符号见图5-7。
按钮上的触点分为常开触点和常闭触点,由于按钮的结构特点,按钮只起发出“接通”和“断开”信号的作用。
图5-7按钮的结构和符号
2.自动电器
1).熔断器
Ø熔断器主要作短路或过载保护用,串联在被保护的线路中。
线路正常工作时如同一根导线,起通路作用;当线路短路或过载时熔断器熔断,起到保护线路上其他电器设备的作用。
Ø熔断器的结构有管式、磁插式、螺旋式、等几种。
其核心部分熔体(熔丝或熔片)是用电阻率较高的易熔合金制成,如铅锡合金;或者是用截面积较小的导体制成。
Ø熔体额定电流
的选择:
1.无冲击电流的场合(如电灯、电炉)
;图5-8熔断器的电路符号
2.一台电动机的熔体:
熔体额定电流≥电动机的起动电流÷2.5;
如果电动机起动频繁,则为:
熔体额定电流≥电动机的起动电流÷(1.6~2);
3.几台电动机合用的总熔体:
熔体额定电流=(1.5~2.5)×容量最大的电动机的额定电流+其余电动机的额定电流之和。
2).交流接触器
接触器是一种自动开关,是电力拖动中主要的控制电器之一,它分为直流和交流两类。
其中,交流接触器常用来接通和断开电动机或其他设备的主电路。
图5-9是交流接触器的主要结构图。
接触器主要由电磁铁和触头两部分组成。
它是利用电磁铁的吸引力而动作的。
当电磁线圈通电后,吸引山字形动铁心(上铁心),而使常开触头闭合。
图5-9接触器工作原理图
根据用途不同,接触器的触头分主
缺点:
KM1和KM2线圈不能同时通电,因此不能同时按下SB1和SB2,也不能在电动机正转时按下反转起动按钮,或在电动机反转时按下正转起动按钮。
如果操作错误,将引起主回路电源短路。
2).带电气互锁的正反转控制电路
将接触器KM1的辅助常闭触点串入KM2的线圈回路中,从而保证在KM1线圈通电时KM2线圈回路总是断开的;将接触器KM2的辅助常闭触点串入KM1的线圈回路中,从而保证在KM2线圈通电时KM1线圈回路总是断开的。
这样接触器的辅助常闭触点KM1和KM2保证了两个接触器线圈不能同时通电,这种控制方式称为互锁或者联锁,这两个辅助常开触点称为互锁或者联锁触点。
图5-16带电气互锁的正反转控制
缺点:
电路在具体操作时,若电动机处于正转状态要反转时必须先按停止按钮SB3,使互锁触点KM1闭合后按下反转起动按钮SB2才能使电动机反转;若电动机处于反转状态要正转时必须先按停止按钮SB3,使互锁触点KM2闭合后按下正转起动按钮SB1才能使电动机正转。
5.2.4.三相异步电动机的控制
上一节课我们讲了电动机的点动与长动控制,这一节课我们在此基础上进一步讲述电动机的继电器——接触器控制系统。
2.正反转控制
3).同时具有电气互锁和机械互锁的正反转控制电路
采用复式按钮,将SB1按钮的常闭触点串接在KM2的线圈电路中;将SB2的常闭触点串接在KM1的线圈电路中;这样,无论何时,只要按下反转起动按钮,在KM2线圈通电之前就首先使KM1断电,从而保证KM1和KM2不同时通电;从反转到正转的情况也是一样。
这种由机械按钮实现的互锁也叫机械或按钮互锁。
图5-17具有电气互锁和机械互锁的正反转控制
3.Y—△降压起动控制
按下起动按钮SB1,时间继电器KT和接触器KM2同时通电吸合,KM2的常开主触点闭合,把定子绕组连接成星形,其常开辅助触点闭合,接通接触器KM1。
KM1的常开主触点闭合,将定子接入电源,电动机在星形连接下起动。
KM1的一对常开辅助触点闭合,进行自锁。
经一定延时,KT的常闭触点断开,KM2断电复位,接触器KM3通电吸合。
KM3的常开主触点将定子绕组接成三角形,使电动机在额定图5-18Y—△降压起动控制
电压下正常运行。
与按钮SB1串联的KM3的常闭辅助触点的作用是:
当电动机正常运行时,该常闭触点断开,切断了KT、KM2的通路,即使误按SB1,KT和KM2也不会通电,以免影响电路正常运行。
若要停车,则按下停止按钮SB3,接触器KM1、KM2同时断电释放,电动机脱离电源停止转动。
4.行程控制
1).限位控制(图5-19)
当生产机械的运动部件到达预定的位置时压下行程开关的触杆,将常闭触点断开,接触器线圈断电,使电动机断电而停止运行。
图5-19限位控制图5-20行程往返控制
2).行程往返控制(图5-20)
按下正向起动按钮SB1,电动机正向起动运行,带动工作台向前运动。
当运行到SQ2位置时,挡块压下SQ2,接触器KM1断电释放,KM2通电吸合,电动机反向起动运行,使工作台后退。
工作台退到SQ1位置时,挡块压下SQ1,KM2断电释放,KM1通电吸合,电动机又正向起动运行,工作台又向前进,如此一直循环下去,直到需要停止时按下SB3,KM1和KM2线圈同时断电释放,电动机脱离电源停止转动。
总结:
1、异步电动机有两种直接起动方法:
直接起动和降压起动。
直接起动简单、经济,应尽量采用;电机容量较大时应采用降压起动以限制起动电流,常用的降压起动方法有Y—△降压起动、自耦变压器降压起动和定子串电阻降压起动等。
2、异步电动机的直接起动和正反转控制电路时控制的基本环节,应掌握它们的工作原理和分析方法,明确自锁和互锁的含义和思想方法。
3、首先了解工艺过程及控制要求;
4、搞清控制系统中各电机、电器的作用以及它们的控制关系;
5、主电路、控制电路分开阅读或设计;
6、控制电路中,根据控制要求按自上而下、自左而右的顺序进行读图或设计;
7、同一个电器的所有线圈、触头不论在什么位置都叫相同的名字;
8、原理图上所有电器,必须按国家统一符号标注,且均按未通电状态表示;
9、继电器、接触器的线圈只能并联,不能串联;
10、控制顺序只能由控制电路实现,不能由主电路实现
习题:
1、有一台四极三相异步电动机,电源电压的频率为50Hz,满载时电动机的转差率为0.02。
求电动机的同步转速、转子转速和转子电流频率。
2、稳定运行的三相异步电动机,当负载转矩增加,为什么电磁转矩相应增大;当负载转矩超过电动机的最大磁转矩时,会产生什么现象?
3、已知某三相异步电动机的技术数据为:
PN=2.8KW,UN=220V/380V,IN=10A/5.8A,nN=2890r/min,cosφN=0.89,f1=50Hz.求:
①电动机的磁极对数p
②额定转矩TN和额定效率ηN。
4、试设计一台异步电动机既能连续长动工作,又能点动工作的继电器——接触器控制线路。
5、一台三相交流电动机,额定相电压为220v,工作时每相负载Z=(50+j25)Ω。
(1)当电源线电压为380V时,绕组应如何连接?
(2)当电源线电压为220v时,绕组应如何连接?
(3)分别求上述两种情况下的负载相电流和线电流。
6、某三相交流电动机,额定相电压为380V,工作时每相阻抗Z=(40+j10)Ω,接在220V三相交流电源中,正常工作时,各相负载星形联结。
但当起动时,为防止起动时电流过大烧坏电动机,改为三角形联结。
试分别计算电动机正常工作时和起动时的功率。
实验八三相异步电动机的正、反转控制
一、实验目的
1.了解交流接触器、热继电器的结构,并掌握其工作原理。
2.掌握电动机实现正、反转控制的原理。
3.掌握电动机正、反转控制线路正确的接线方法和操作方法。
二、实验原理
1.直接起动的正反转
不少生产机械,例如吊车、刨床等都需要上下、左右等两个方向的运动,这就要求拖动它的电动机必须能实现正、反转控制。
由三相异步电动机工作原理可知,电动机的转动方向与旋转磁场的方向一致,要改变电动机的转向只要改变旋转磁场的方向即可,而旋转磁场的方向由三相电源的相序决定。
因此将电动机的三根电源线中的任意两根对调,便可实现电动机的反转,其原理图如右图所示。
在右图的主电路中,SB3是停机按钮,SB1正转起动按钮,KM1正转控制接触器,当KM1的线圈通电,其主触头闭合,定子绕组三个头分别接入电源的A、B、C三相,电动机正转。
SB2是反转起动按钮,KM2是反转控制接触器,当KM2的线圈通电,其主触头闭合,定子绕组三个头分别接入电源的C、B、A三相,电动机反转。
可见当通入定子绕组的电流相序改变时,电动机就反转。
注意:
(1)为保证正转或反转能连续工作,在电路中设置了两个自锁开关,他们分别与其起动开关并联。
如果没有自锁开关,则本电路只能实现点动运转控制。
(2)为保证正转时,反转控制电路可靠断开,即KM1与KM2不能同时闭合,因此在电路中分别设置了两个互锁开关。
三、实验仪器
1.控制电路装置一套
2.三相异步电动机一台
四、实验步骤
1.按图连接好线路(注意电动机绕组接成Y形联接),由同学相互检查无误并请教师检查同意后,合上开关QS。
2.接触器点动控制
按下正转按钮SB1电动机旋转,松手后电动机停止转动。
3.电动机自锁控制
将交流接触器KM1的一对常开辅助触头并联到SB1上,按下正转按钮,电动机正向旋转,松手后电动机继续转动。
4.电动机正反转控制
(1)正转按下正转按钮SB1,观察电动机正向旋转。
(2)停机按下停止按钮SB3。
(3)反转按下反转按钮SB2,观察电动机反向旋动。
五、实验注意事项
1.实验电路较复杂,相与相的触头距离近,因此接线时要求十分小心。
2
 升级会员
升级会员 