航空模型的基本原理与基本知识.docx
《航空模型的基本原理与基本知识.docx》由会员分享,可在线阅读,更多相关《航空模型的基本原理与基本知识.docx(24页珍藏版)》请在冰点文库上搜索。
航空模型的基本原理与基本知识
一、航空模型的基本原理与基本知识
1)航空模型空气动力学原理
1、力的平衡
飞行中的飞机要求手里平衡,才能平稳的飞行。
如果手里不平衡,依牛顿第二定律就会产生加速度轴力不平衡则会在合力的方向产生加速度。
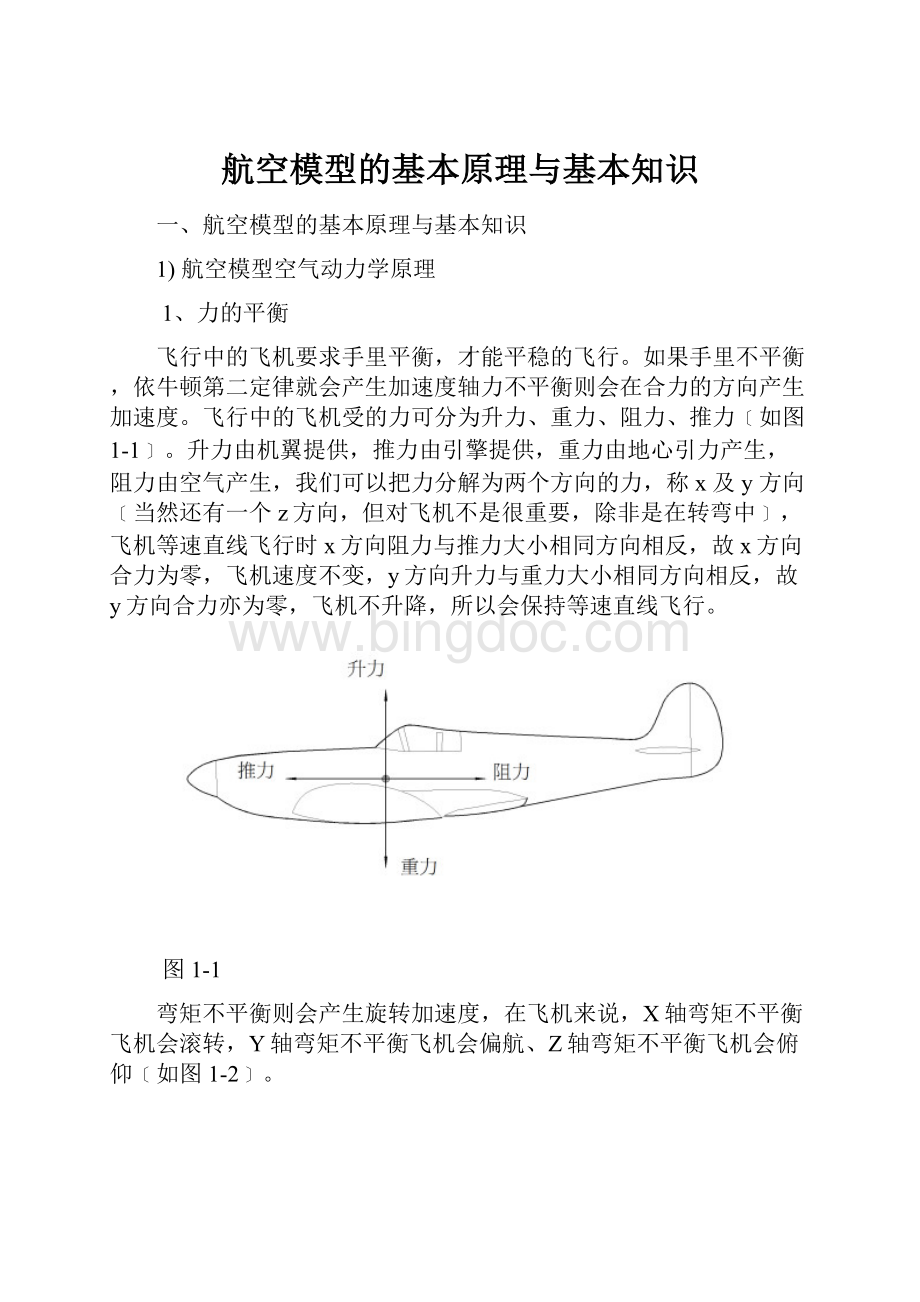
飞行中的飞机受的力可分为升力、重力、阻力、推力﹝如图1-1﹞。
升力由机翼提供,推力由引擎提供,重力由地心引力产生,阻力由空气产生,我们可以把力分解为两个方向的力,称x及y方向﹝当然还有一个z方向,但对飞机不是很重要,除非是在转弯中﹞,飞机等速直线飞行时x方向阻力与推力大小相同方向相反,故x方向合力为零,飞机速度不变,y方向升力与重力大小相同方向相反,故y方向合力亦为零,飞机不升降,所以会保持等速直线飞行。
图1-1
弯矩不平衡则会产生旋转加速度,在飞机来说,X轴弯矩不平衡飞机会滚转,Y轴弯矩不平衡飞机会偏航、Z轴弯矩不平衡飞机会俯仰﹝如图1-2﹞。
图1-2
2、伯努利定律
伯努利定律是空气动力最重要的公式,简单的说流体的速度越大,静压力越小,速度越小,静压力越大,流体一般是指空气或水,在这里当然是指空气,设法使机翼上部空气流速较快,静压力则较小,机翼下部空气流速较慢,静压力较大,两边互相较力﹝如图1-3﹞,于是机翼就被往上推去,然后飞机就飞起来,以前的理论认为两个相邻的空气质点同时由机翼的前端往后走,一个流经机翼的上缘,另一个流经机翼的下缘,两个质点应在机翼的后端相会合﹝如图1-4﹞,经过仔细的计算后发觉如依上述理论,上缘的流速不够大,机翼应该无法产生那么大的升力,现在经风洞实验已证实,两个相邻空气的质点流经机翼上缘的质点会比流经机翼的下缘质点先到达后缘﹝如图1-5﹞。
图1-3
图1-4
图1-5
3、翼型的种类
1全对称翼:
上下弧线均凸且对称。
2半对称翼:
上下弧线均凸但不对称。
3克拉克Y翼:
下弧线为一直线,其实应叫平凸翼,有很多其它平凸翼型,只是克拉克Y翼最有名,故把这类翼型都叫克拉克Y翼,但要注意克拉克Y翼也有好几种。
4S型翼:
中弧线是一个平躺的S型,这类翼型因攻角改变时,压力中心较不变动,常用于无尾翼机。
5内凹翼:
下弧线在翼弦在线,升力系数大,常见于早期飞机及牵引滑翔机,所有的鸟类除蜂鸟外都是这种翼型。
基本航模的翼型选测规律:
1薄的翼型阻力小,但不适合高攻角飞行,适合高速机。
2厚的翼型阻力大,但不易失速。
3练习机用克拉克Y翼或半对称翼,因浮力大。
4特技机用全对称翼,因正飞或倒飞差异不大。
5斜坡滑翔机用薄一点翼型以增大滑空比。
63D特技机用前缘特别大的翼型以便高攻角飞行。
4、飞行中的阻力
一架飞行中飞机阻力可分成四大类:
1磨擦阻力:
空气分子与飞机磨擦产生的阻力,这是最容易理解的阻力但不很重要,只占总阻力的一小部分,当然为减少磨擦阻力还是尽量把飞机磨光。
2形状阻力:
物体前后压力差引起的阻力,平常汽车广告所说的风阻系数就是指形状阻力系数﹝如图3-3﹞,飞机做得越流线形,形状阻力就越小,尖锥状的物体形状阻力不见得最小,反而是有一点钝头的物体阻力小,读者如果有机会看到油轮船头水底下那部分,你会看到一个大头,高级滑翔机大部分也有一个大头,除了提供载人的空间外也是为了减少形状阻力。
3诱导阻力:
机翼的翼端部因上下压力差,空气会从压力大往压力小的方向移动,部份空气不会规规矩矩往后移动,而从旁边往上翻,因而在两端产生涡流﹝如图3-4﹞,因而产生阻力,这现象在飞行表演时,飞机翼端如有喷烟时可看得非常清楚,你可以注意涡流旋转的方向﹝如图3-5﹞,﹝图3-6﹞是NASA的照片,可看见壮观的涡流,因为这种涡流延伸至水平尾翼时,从水平尾翼的观点气流是从上往下吹,因此会减小水平尾翼的攻角,也就是说水平尾翼的攻角实际会比较小,﹝图3-6﹞只不过是一架小飞机,如像类似747这种大家伙起飞降落后,小飞机要隔一阵子才能起降,否则飞入这种涡流,后果不堪设想,这种阻力是因为涡流产生,所以也称涡流阻力。
4寄生阻力:
所有控制面的缝隙﹝如主翼后缘与副翼间﹞、主翼及尾翼与机身接合处、机身开孔处、机轮及轮架、拉杆等除本身的原有的阻力以外,另外衍生出来的阻力﹝如图3-7,3-8﹞。
一架飞机的总阻力就是以上四种阻力的总合,但飞机的阻力互相影响的,以上的分类只是让讨论方便而已,另外诱导阻力不只出现在翼端,其它舵面都会产生,只是翼端比较严重,磨擦阻力、形状阻力、寄生阻力与速度的平方成正比,速度越快阻力越大,诱导阻力则与速度的平方成反比﹝如图3-9﹞,所以要减少阻力的话,无动力飞机重点在减少诱导阻力,高速飞机重点在减少形状阻力与寄生阻力。
5、机翼负载
翼面负载就是主翼每单位面积所分担的重量,这是评估一架飞机性能很重要的指针,模型飞机采用的单位是每平方公寸多少公克﹝g/dm2﹞,实机的的单位则是每平方公尺多少牛顿﹝N/m2﹞,翼面负载越大意思就是相同翼面积要负担更大的重量,如果买飞机套件的话大部分翼面负载都标示在设计图上,计算翼面负载很简单,把飞机﹝全配重量不加油﹞秤重以公克计,再把翼面积计算出来以平方公寸计﹝一般为简化计算,与机身结合部分仍算在内﹞两个相除就得出翼面负载,例如一架30级练习机重1700公克,主翼面积30平方公寸,则翼面负载为56.7g/dm2。
练习机一般在50~70左右,特技机约在60~90,热气流滑翔机30~50,像真机110以内还可忍受,牵引滑详机约12~15左右,
6、展弦比
从雷诺数的观点机翼越宽、速度越快越好,但我们不要忘了阻力,短而宽的机翼诱导阻力会消耗你大部分的马力。
飞机要有适合的展弦比,展弦比A就是翼展L除以平均翼弦b(A=L/b),L与b单位都是cm,如果不是矩形翼的话我们把右边上下乘以L,得A=L2/S,S是主翼面积,单位是cm²,这样不用求平均翼弦,一般适合的展弦比在5~7左右,超过8以上要特别注意机翼的结构,药加强记忆强度,否则,一阵风就断了。
滑翔机实机的展弦比有些高达30以上。
如前所述磨擦阻力、形状阻力与速度的平方成正比,速度越快阻力越大,诱导阻力则与速度的平方成反比,所以高速飞机比较不考虑诱导阻力,所以展弦比低,滑翔机速度慢,采高展弦比以降低诱导阻力,最典型的例子就是U2﹝如图3-15﹞跟F104﹝如图3-16﹞,U2为高空侦察机,为长时间翱翔,典型出一次任务约10~12小时,U2展弦比为10.5,F104为高速拦截机,速度达2倍音速以上,展弦比4.5,自然界也是如此,信天翁为长时间遨翔,翅膀展弦比高,隼为掠食性动物,为求高速、灵活,所以展弦比低。
滑翔机没有动力,采取高展弦比以降低阻力是唯一的方法,展弦比高的机翼一般翼弦都比较窄,雷诺数小,所以要仔细选择翼型,避免过早失速,另外高展弦比代表滚转的转动惯量大,所以也不要指望做出滚转的特技了。
7、翼面
翼平面即是主翼平面投影的形状,当我们已假定飞机重量、翼面负载后,主翼面积即可算出,展弦比亦已大致决定,这时就要确定主翼平面形状,考虑的因素有1失速的特性、2应力分布、3制作难易度、4美观,模型飞机的速度离音速还差一大截,不须考虑空气压缩性,也没有前后座视野的问题,所以后掠翼不需考虑,当然为美观或像真机除外,常见的平面形状及特性如下:
1矩形翼:
﹝如图4-1﹞从左至右翼弦都一样宽,练习机常用的形状,因为制作简单,失速的特性是从中间开始失速,失速后容易补救。
2和缓的锥形翼:
﹝如图4-2﹞从翼根往翼端渐缩,制作难易度中等,合理的翼面应力分布,缓和的翼端失速,特技机最常见的意形式。
3尖锐的锥形翼:
﹝如图4-3﹞同样从翼往翼端渐缩,但翼端极窄,恶劣的的翼端失速。
4椭圆翼:
﹝如图4-4﹞制作难度高,最有效率的翼面应力分布,翼端至翼根同时失速,这也是天上最优美的翼面形式。
机翼先失速的位置跟局部升力系数与平均升力系数的比值有关,比值大的地方先失速,另因升力分布于所有翼面,机翼的剪应力及弯矩应力会从翼端往翼根处累积,所以飞机结构失败在空中折翼都在靠机身处,矩形翼结构应力分不就很不经济,靠翼端处结构过强,增加无谓的重量,锥形翼、椭圆翼就比较经济,此外从图面也可看出矩形翼的诱导阻力比较大,即使翼端的面积大效率也不好。
尖锐的锥形翼翼端极窄,雷诺数小,且因为翼弦短,同样精度下制作时攻角误差大,翼端很容易失速,翼端失速后就从先失速的一端先往下掉,而且不见得救得回来,所以做Ju87像真机那类飞机要特别注意。
主翼平面形状不需要一成不变的为锥形翼或椭圆翼,可以依需求、制作难易度及美观采取各种组合。
2)遥控系统
随着我们身边的电子产品的不断更新我们身边的电子讯号干扰日趋严重对航模业来影响越来越严重之前的遥控器和遥控模型之间是采用100MHz以下的频度来通讯的现在的电子讯号对低频段的干扰是很严重的而且100MHz的通讯距离有限。
数字无线通讯技术的不断发展越来越多的航模厂商的把目光投向ISM频段尤其是全球免费频段2.4G的数字无线传输模块上。
而传统的模拟低频无线航模远控系统日益受到信号干扰严重、通讯间隔有限、同场信道少等缺点的制约。
飞机模型的无线电遥控,是指利用无线电波传送操作者对模型动作的指令模型根据指令做出各种飞行姿态。
用无线电技术对模型进行飞行控制的史,可以追溯到第二次世界大战以前。
不过,由于当时民间。
用无线电制航模面临十分复杂的法律手续,而且当时的遥控设备既笨重又极不可,因此,遥控航模未能推广开来到了本世纪60年代初期,随着电子技术发展,各种应用于航模控制的无线电设备也开始普及,时至今日,无线遥控设备已广泛地用于各种航空、航海和陆上模型。
以四通道比例遥控设备系统为例,它由发射机、接收机、舵机、电源等部分组成。
图l所示的,是4通道比例遥控设备发射机的外型和各部分名称。
在发射机的面板上,有两根分别控制l、2通道和3、4通道动作指令的操纵秆,以及与操纵杆动作相对应的4个微调装置。
在发射机底部,设置有4个舵机换向开关,分别用于变换舵机摇臂的偏转方向。
图2所示的,是接收机和舵机以及接收机电源装置,其中接收机用来接收从发射机传来的指令信号,经处理后,指挥舵机作出与发射机指令相对应的动作。
电池组给接收机和舵机提供工作能源,它由4节普通5号干电池串联而成。
如果是电动航模则将其中一个舵机换为电子调速器(俗称电调)。
电子调速器连接电源和电机,而且接收机也直接由电子调速器连接的电源供电。
所谓比例控制,简单说来,就是当我们把发射机上的操纵杆由中立位置向某一方向偏移一角度时,与该动作相对应的舵机摇臂也同时偏移相应的角度,舵机摇臂偏转角度与发射机操纵杆偏移角度成比例.图3显示了发射机执行舵机与飞机模型舵面的动作关系。
当发射机操纵杆(或对应的微调杆)往左、右偏转或回复中立时,执行舵机的摇臂也随之相应地往左、右偏转或回复中立,带动模型的舵面往左,右偏转或回复中立,操纵杆(或微调杆)、舵机摇臂、模型舵面偏转的角度大小成比例。
4通道的比例遥控设备,可以同时对模型进行四个不同动作(例如油门、升降舵,方向舵,副翼)的比例控制。
这样的控制已十分接近载人飞机的操纵了。
因此,如果能熟练地运用遥控设备和充分地掌握模形飞行的原理,经过一段时间的刻苦练习,操纵者可象驾驶载人飞机一样控制模型在天空自由飞翔。
发射机的组成如图4所示,它基本上是由操纵器、编码电路、开关电路、高频电路组成。
。
操纵器与可变电位器电路连接可变电位器又信号发生电路—编码器连接,编码鸡器发生的信号搭载在高频无线电波上由天线发送出去,这个过程有点像用火车运载货物,操纵者相当于货运调度员,动作指令信号相当于货物,而高频无线电波相当于火车,把\"货物\"搬上\"火车\"的过程称为调制。
4通道遥控发射机发出的无线电波如图5所示,Ta_d操纵杆用脉冲信号及Ts矩形波(共5个信号)组成一个周波,在1秒时间内大约自动重复出现30个周波。
Ta_d分别与和操纵杆连接的可变电位器相对应,当操纵杆运作时,Ta_d的信号随之改变其时间宽度,促使与接收机连接的舵机边做出相应成比例的动作.Ts信号不是用于操纵杆的、短有较长的时间宽度,当接收机由于杂音信号干扰而引起信号排列紊乱时,它能自动整形。
在脉冲信号之间的To是没有无线电信号的间隔期,它能使接收机可靠地区别多个信号。
接收机组成如图6所示,它基本上可分成接收电路、译码电路等部分。
从接收电路出来的低频输出通过译码电路就能分别独立地取出由发射机发出的操纵杆动作信号Ta_d。
这个过程有点像货物运达目的地车站后;把货物卸下来并分类送给不同的使用者。
接收电路相当于接货、卸货人员,她们把“货物”卸下来后,由货物分类人员(译码电路)把“货物”送给不同的用户—各个执行舵机。
舵机的组成如图7所示。
舵机由能够取出与发射机操纵杆动作成比例的信号的电路和能够作出与该信号相对应动作的马达和齿轮减速机构组成。
作为发射机操作杆动作与模型动作之间的动作媒介,舵机的可靠性是极为重要的。
舵机动作摇臂常用的形状如图8所示。
这些摇臂因用途不同而具有不同的形状、力臂半、半径、强度。
六通道遥控器电路如图
3)动力系统
航空模型的动力,根据能量来源的不同分为电动和油动。
本航模采用电动,所以着重介绍一下电机。
油动机主要的能量是来源于燃料,如煤油、甲醇等,燃料在内燃机或者是喷气发动机中燃烧,从而带动飞机前进。
电动则不明思议是有电池或只是蓄电池提供电力有电机将电能转化为机械能。
电机主要有有刷电机和无刷电机两类。
当下航空模型中主要使用无刷电机,也有一部分使用有刷电机。
有刷电机电机工作时线圈和换向器旋转磁钢和碳刷不转线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。
有刷电机和无刷电机有很多区别从名字上可以看出,有刷电机有碳刷无刷电机没有碳刷。
1、无刷直流电机由电动机主体和驱动器组成是一种典型的机电一体化产品。
由于无刷直流电动机是以自控式运行的所以不会象变频调速下重载启动的同步电机那样在转子上另加启动绕组也不会在负载突变时产生振荡和失步。
2、有刷电机是指电机是直流电输入控制它的控制器只给它提供大小电流就可以调速了;而无刷电机其实就是个三相交流电机靠控制器把直流电转换成三相交流电并根据电机里的传感器霍尔元件进行换相使电机正常运转。
直接来说无刷电机比有刷电机寿命长、起步有劲省电但是控制器却比有刷控制器成本高。
无刷电机常识:
无刷电机上标有2212KV1400等参数,前面的四位数是电机形状的参数,22表示直径,12表示电机的长度。
而kv1400则表示该电机在1V电压下每分钟的转速为1400转,如果是在10V电压下工作则转速时14000转每分钟。
2208KV2200则表示电机直径22mm,长度8mm,1V电压下工作每分钟转速为2200转。
计算公式为:
电机的转速(空载)=KV值X电压;例如KV1000的电机在10V电压下它的转速(空载)就是10000转/分钟。
电机的KV值越高,提供出来的扭力就越小。
电机与浆的搭配:
3S电池下;KV900-1000的电机配1060或1047浆,9寸浆也可
KV1200-1400配9050(9寸浆)至8*6浆
KV1600-1800左右的7寸至6寸浆
KV2200-2800左右的5寸浆
KV3000-3500左右的4530浆
2S电池下;KV1300-1500左右用9050浆
KV1800左右用7060浆
KV2500-3000左右用5X3浆
KV3200-4000左右用4530浆
各型号电机与不同桨组合的推力测试数据:
A2212KV930:
GWS1047桨:
11V12.1A6430转788克;10.5V11.6A6270转750克;10V10.9A6130转710克;9.5V10.1A5900转650克。
GWS1060HD桨,11V9.9A,7130转,推力650克。
10V8.6A,6690转,推力575克。
A2212,KV1000:
GWS1047RS桨,11V15.6A,6810转,推力886克。
10V14A,6530转,推力820克。
GWS1060HD桨,11V13.1A,7630转,推力745克。
10V11.6A,7260转,推力675克。
(450-550克的3D配置,3S12-15C1000-1500mAh)
GWS9050HD桨,11V10.5A8430转,推力681克。
10V9.2A7900转,推力603克。
(300-400克的3D配置,3S10-12C800-1200mAh)
A2212,KV1400:
GWS1047RS桨,8V18A,6380转,推力775克。
7V15.1A,5860转,推力650克。
(400-450克的3D配置,2S12—15C1200-1500mAh)
GWS1060HD桨,8V15.2A,7220转,推力670克,7V12.7A,6560转,推力553克。
GWS9050HD桨,11V18.9A,9720转,推力903克,10V,15.4A,9240转,推力816克。
GWS8040HD桨,11V12.6A,11800转,推力700克。
10V11A,11000转,推力606克。
GWS8060HD桨,11V17.8A,10250转(破桨了),10V,15.4A,9660转。
(600克级别的电动3A普通固定翼的配置)
A2212,KV1750:
2S锂电,适合HY8×4.3桨;3S锂电,适合7×3~7×5的桨(售缺)
A2212,KV2200:
5043桨,11V21.1A,18800转,10V19.1A,17600转。
(400-650克级别,高速飞翼后推像真机用的配置。
3S15-20C1500-2000mAh)
一般来说,浆越大对飞机所产生的反扭力越大,所以浆的大小与机的翼展大小有着一定关系,但浆与电机也有着上面所讲的关系。
例如用1060浆,机的翼展就得要在80CM以上为合适,不然的话机就容易造成反扭;又如用8*6的浆翼展就得在60以上。
在选择玩什么机型的时候就要注意这4者的关系,尤其是新手选择机型,一定要看这机型翼展大小选择配电机、浆、电池,特别要注意的是,不能用大浆配高KV的电机,否则烧电机还影响了电池,有可能连电调也烧掉。
4)能量来源
时下航空模型的动力来源主要分为电动和油动。
油动自然是由发动机燃烧燃料提供动力。
现在比较流行的燃料有很多,常用的燃料是煤油和乙醚和甲醇。
依据的原理是内燃机。
电动则是由电流驱动电机提供动力,航模的充电电池的种类比较多,但是用于航模之上要求能量密度大,重量轻,放电电流大,目前主要使用镍铬电池、镍氢电池和锂离子电池。
充电电池的内阻低,使用时谨防短路,否则可能引起烫伤、火灾。
镍镉电池(Ni-CD)的主要特点是优异的大电流放电性能,满足航模短时间高功率要求。
充电电池一个重要的性能指标是放电倍率。
所谓放电倍率,就是指电池的最大连续放电电流与其标称容量电流(C)的比值。
C代表的是以一小放电完毕的电流或者说是标称容量的电流为1C。
通常在容量C前加一个数字表示。
例如某种1800毫安电池的放电倍率为10C,即表示它的最大连续放电电量为18A,可见放电倍率是衡量电池急放电性能的重要指标。
由于生产工艺和结构上的差异,不同品牌电池的放电倍率往往不同。
国产镍隔电池一般为6C~12C,进口电池通常要高一些,尤其是模型飞机专用动力电池,往往可达20C左右,优秀的三洋电池甚至高40C以上。
选择电池首先就是选挥高放电倍率的电池。
但是镍镉电池的能量密度小,并且有记忆效应,废旧电池对环境污染比较大,将很快被淘汰,目前只用于特大电流输出的场合。
镍氢电池(Ni-MH)是一种环保型的充电电池,使用性能和充电方式同镍铬电池一样,标称电压也是1.25伏,但是功率密度更大,目前已经在相当多的场合取代了镍铬电池,只是在大电流放电性能方面尚不及镍铬电池,一般在7C左右。
镍铬电池和镍氢电池有相同系列的型号,常用的主要有F型、D型、C型、SC型、A型、AA型(5号)、AAA型(7号)AAAA型等。
扣式,方型,口香糖型,此外还会有一些特殊型号的电池,它们通常是由标准电池型号规格衍生出来的加长或缩短型号。
电池单体(电池芯)有时也直接以电池尺寸为标示,如18650、1848,它们标示的是直径18毫米,长度分别为65毫米和8毫米的单体电池。
航模中电机以及接收机都要使用电源,它们的电压一般都在5伏以上,动力组一般都在9~12伏以上,这需要多节电池串联,一般用镍片点焊连接。
业余制作可以用用铜片锡焊,不过要注意焊接时间短,避免电池受损。
锂离子聚合物电池(Li-Poly)是今后充电电池发展的方向。
它已经广泛的是用在手机等掌上电子产品上面。
锂离子聚合物的单体电压高达3.6伏,能量密度大,质量轻,没有记忆效应。
但是锂离子电池的充放电要求比较高,也很难做到大电流放电,一般在3C左右,否则非常容易损伤电池。
而航模专用的锂离子聚合物电池的放电能力已达10C,同时锂离子聚合物电池的安全性已经不成问题,但需要专门的充放电保护电路保护。
锂离子聚合物电池的封装形式非常多,多数为扁的长方体,并且带有每块电池专用的保护电路,在放电电压低于一定时间或放电电流高于一定时间都会自动保护,很多电池保护电路还带有充电保护功能。
锂离子聚合物电池在结构上采用铝塑软包装,有别于早期液态电芯的锂离子电池(Li-ion)的金属外壳,一旦发生安全隐患,液态电芯容易爆炸,而聚合物电芯最多只会气鼓。
 升级会员
升级会员 