遥控直升机控制原理Word格式文档下载.docx
《遥控直升机控制原理Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《遥控直升机控制原理Word格式文档下载.docx(18页珍藏版)》请在冰点文库上搜索。
和
方向相同。
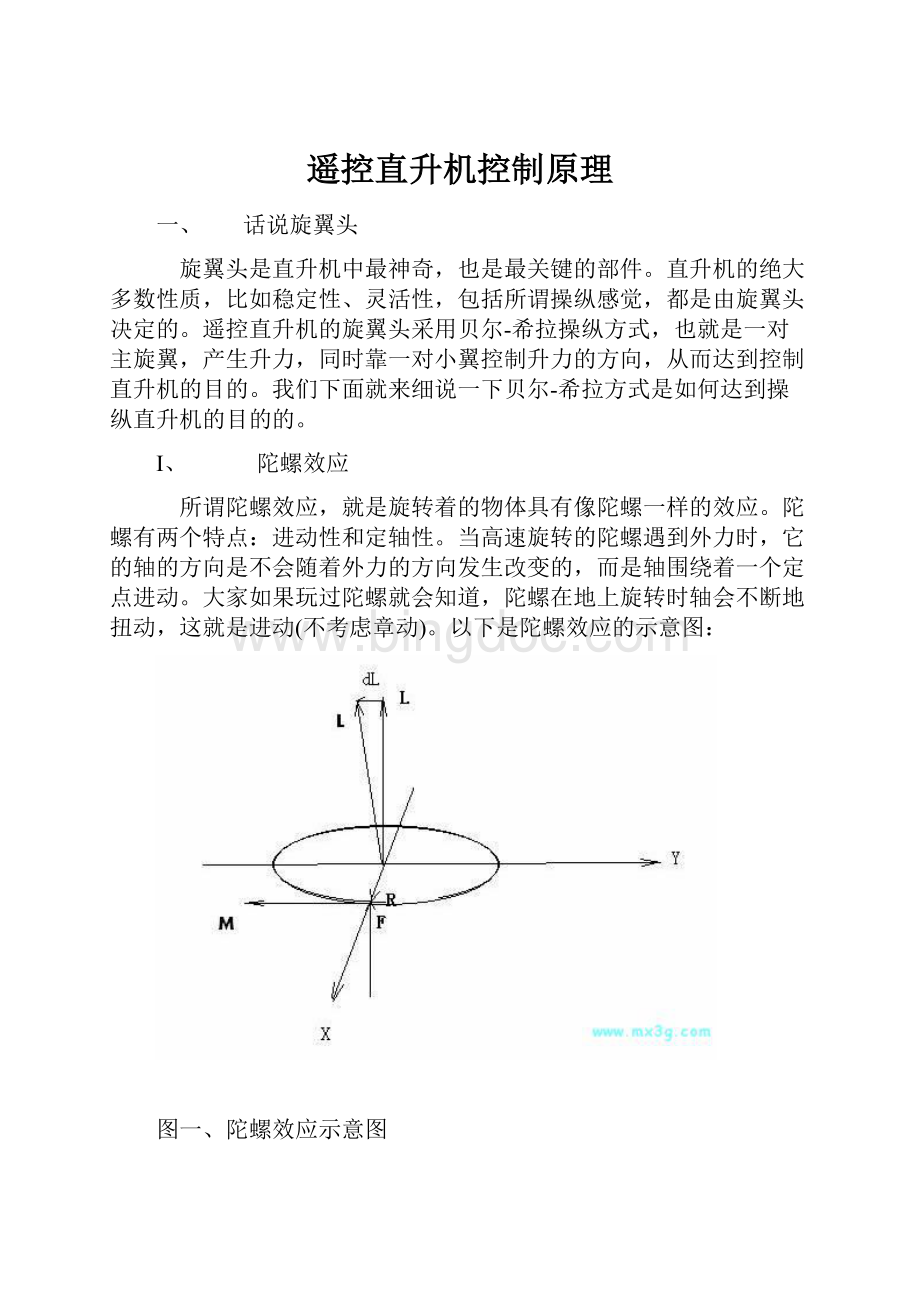
这直接导致了(如图)高速转动的陀螺在受到F后,整个陀螺以X轴为转轴转动而不是以Y轴为转轴。
这就是神奇的陀螺效应。
这种效应一直伴随着直升机的飞行。
例如:
要使直升机仰俯,就必须要使直升机左右的升力不平衡而不是使其前后不平衡。
基于这种原理我们下面就来解释遥控直升机的所谓贝尔-希拉操纵方式。
II、
贝尔-希拉操纵方式的初步分析
说起贝尔-希拉,同好们映像最深的一定是那对“希拉”小翼。
这是遥控直升机唯一区别于真飞机的地方。
那么这对小翼的作用究竟是什么呢?
她所带来的好处是什么?
下面就听我细细说来。
在I中,我们已经看到陀螺效应的基本原理。
在遥控直升机中,主旋翼就是一个大陀螺,它本身具有陀螺效应。
当我们改变主旋翼倾角时,直升机的运动状态就会发生改变。
但同时,如果用舵机直接改变主旋翼的倾角来控制飞机,问题是很多的。
首先,主旋翼倾角的改变需要较大的力矩。
如果用十字盘直接控制的话,强大的、交变的力矩将会直接作用到舵机上。
这样舵机将会受到很大负荷,操纵精度会严重下降。
第二,当直升机受到轻微扰动后,由于陀螺的进动性,直升机将不会恢复原来状态,而是绕着垂线方向进动(如图)。
图
如图,由于重力不通过旋翼头中心,所以造成力矩的产生,从而导致主旋翼发生进动。
这个问题是严重的,会直接导致遥控直升机悬停及飞行时无法稳定。
基于以上问题,贝尔-希拉操纵方式产生了。
操纵过程是这样的:
一、初始状态
希拉小翼由于空气和离心力作用,和主旋翼平面平行。
此时两片主旋翼升力相等,飞行状态不发生变化
二、操纵时
上图为同一个视角,主旋翼转动到不同角度时的状态。
在图I中,操纵者将十字盘倾斜。
希拉小翼就与空气呈10°
倾角。
由于空气的作用,希拉小翼在图I位置受力。
由于陀螺效应,希拉小翼不会在图I位置立即上抬,而是在转过90°
后在上图II位置上抬。
于是希拉小翼旋转平面与主旋翼平面呈10°
夹角并稳定于此。
在图II中,我们清晰地看见,由于希拉小翼通过连杆控制着主旋翼的倾角,所以希拉小翼旋转平面的改变导致了主旋翼与空气产生夹角。
从而使主旋翼在图II位置受力。
由于陀螺效应,主旋翼不会在图II位置立即上抬,而是在转过90°
后在图I位置上抬。
从而使得主旋翼平面趋于平行于希拉小翼。
至此,遥控直升机主旋翼平面的倾转过程已经分析完毕。
我们看到,遥控直升机的倾转总是希拉小翼旋转平面先倾转,主旋翼平面跟上趋于平行的过程。
有意思的是,在这一过程中主旋翼操纵的负荷被希拉小翼完全承担。
舵机只需承担操纵希拉小翼的负荷。
这就有效地化解了一般操纵方式舵机负荷过重的问题。
下面再来初步分析希拉小翼对遥控直升飞机稳定性带来的好处。
为此,我们来看贝尔-希拉操纵系统的干扰-稳定过程:
二、外界气流对飞机进行干扰。
当遇到气流时,由于主旋翼的旋转,会导致左、右主旋翼相对于空气的速度不同,从而产生力矩,使飞机偏离平衡位置。
如图:
在上图中,飞机机身及主旋翼平面由于干扰而失去平衡位置。
但由于希拉小翼采用对称翼型,不会受到外界干扰。
由于陀螺效应的定轴性,希拉小翼平面保持不变。
所以此时主旋翼平面由于与希拉小翼平面有夹角而产生恢复力矩,抵抗外界干扰。
这就是贝尔-希拉控制方式的自稳定过程。
也正是这个过程,使得遥控直升飞机避免了被干扰后就陷于进动的问题。
同时,当直升飞机高速前进时,由于左、右主旋翼相对空气的速度不同,会导致力矩的产生,使飞机抬头的现象也被这种贝尔-希拉控制方式有效抑制,从而有效地提高了遥控直升飞机的可操纵性。
值得注意的是,贝尔-希拉自稳定过程不能抑制过强的干扰。
原因是希拉小翼旋转平面保持原来运动状态的同时,由于机身的倾斜,小翼与空气平面会产生夹角,从而破坏小翼原来的运动状态。
由于β角的存在,希拉小翼旋转平面会向主旋翼旋转平面方向旋转,最后趋于平行。
所以贝尔-希拉的自稳定过程是有限的。
还需要其他手段(比如使希拉小翼不太灵敏)来增加稳定性。
通过以上的初步分析,大家应该已经对遥控直升飞机的控制原理有了一个大概的了解,对直升机旋翼头有了一定的认识。
对于一般以及能力有限的同好,了解这些已经足够。
但对于另一些喜欢刨根问底的或者是希望参加比赛的发烧级同好,改装、调整飞机成了必要的工作。
所以应该深入、定量地分析贝尔-希拉的操纵过程。
我下面就做一些这方面的工作。
希望能给大家一点启发。
III、
贝尔-希拉操纵方式的定量分析
(看不懂这一章的可以直接看最下方的总结)
(1)微扰动过程。
在进行定量分析之前,我将贝尔-希拉控制过程分为两类-——微扰动过程和一般过程,目的是从易到难,逐个分析,从而简化难度。
从II中,我们已经知道直升飞机的操纵主要过程是:
小翼与空气产生夹角→小翼旋转平面倾斜→主旋翼与空气产生夹角→主旋翼旋转平面倾斜。
在某些情况下,比如阵风对飞机干扰时,小翼旋转平面的倾斜大大大于主旋翼平面的倾斜,所以我们就将主旋翼平面的倾斜忽略不计。
这样,只要研究小翼的运动而不必考虑主旋翼平面的转动对小翼造成的影响。
这样分析是有益的,能让我们方便地看清飞机在悬停时有风的情况下的运动方式,以及诸如转速、希拉小翼的质量分布对飞机稳定性的影响。
首先将希拉小翼看作陀螺。
令:
希拉小翼:
角动量为L
转动惯量为I
半径为R
由舵机控制而转过的角度或者机身由于扰动主旋翼平面与小翼的平面夹角(不是小翼旋转平面)为θ(如图)
旋转平面与主旋翼夹角为ψ
平面以X轴为轴的转动角速率为ω
主旋翼转速为
∵
//F是小翼与空气有夹角后受到的力。
因为是微扰动,ψ很小。
∴
上式的意思是,主旋翼转速为
,转动惯量为I的希拉小翼受到力矩M后,其平面转动速率(也可以理解为一端向上抬起的速率)
-------
对于同一级别的直升机,由于主旋翼转速是固定的,希拉小翼的转动惯量
也是定值,所以当主旋翼转速越快,ω越小,也就是希拉小翼上抬的速率越小,或者说直升机在悬停时遇到风的情况就越稳定。
对于90级直升机,其希拉小翼的转动惯量I大于50级直升机。
所以也就比50级稳定。
上式充分说明了直升机的转速以及希拉小翼+平衡杆的转动惯量的大小与直升机的稳定性成正比。
大直升机稳定性的根源就在于此。
为了了解直升机的运动状态,光有上式是不够的。
因为M会随着直升机姿态的恢复而变化。
不同品牌,不同型号的直升机,M的变化方式不同。
比如,有的直升机在收到扰动后恢复姿态时,M一开始变化很快,后来逐渐变慢;
而有的是M的变化趋于平稳。
这样也就导致了希拉小翼的ω,即一端上抬存在加速度,这也就是不同直升机有不同操纵感觉的原因。
为了充分分析问题,我们必须找出ω随时间t的变化规律ω(t)以及希拉小翼的平面与主旋翼夹角ψ的变化规律ψ(t)。
//这是升力公式,F是小翼受到的力
根据一开始的定义,由舵机控制而转过的角度或者机身由于扰动主旋翼平面与小翼的平面夹角(不是小翼旋转平面)为θ
在θ不太大的情况下,
即正比关系。
令
两边求导,
我们认为θ是定值。
C为积分常数,由初始条件定出:
当t=0时,ψ=0
-----------------
这就是微扰动情况下希拉小翼旋转平面随时间的运动方程。
从这个方程中我们可以看到,平衡杆的转动惯量
越大,随时间的变化就越慢,飞机也就越稳定。
这也就是为什么hirobo的练习机在平衡杆上加重物的原因。
(主旋翼转速),
(空气密度),R(平衡杆长度),S(希拉小翼面积)越大,平衡杆的变化也就越灵敏。
原则上飞机就越灵活。
这似乎与前面得到的一个结论相矛盾,也与我们平时飞行的感觉不符。
我们平时飞行时,总觉得主旋翼转速越高,飞机越稳定。
事实也是如此。
那么问题关键出在什么地方呢?
原来,B式所要描述的过程已经不同于微扰-稳定过程。
因为在分析中,我们用了
这个条件。
这个条件是有前提的,即θ不太大也不太小的情况下这个条件成立。
也就是说,上式给出了一个在θ不太大也不太小,正好满足微扰条件的希拉小翼旋转平面的运动方程。
这个方程是有局限性的。
当我们让遥控直升飞机作大动作的时候,上式不适用。
对于θ极小的情况下,上式也不适用。
因为
,
,而是等于一个由于摩擦或其他效应造成的小量m。
所以此时只能用方程
来描述希拉小翼旋转平面的运动。
A式告诉我们,
越高,即主旋翼转速越高,飞机越稳定。
同时,B式告诉我们,
越高,直升机越灵活。
所以提高
对飞机来说好处很多。
尤其对F3D,提高
可以使飞机做到静如处子,动如脱兔的地步。
。
飞起来会得心应手。
2)、大幅度操纵过程
对于大幅度地操纵遥控直升飞机,主旋翼旋转平面的变化就不能被忽略了。
这会使问题十分复杂。
为了相对清晰地研究这个问题,我决定以上一个分析为基础进行研究。
主旋翼:
角动量为
转动惯量为
半径为
旋转平面与初始平面夹角为
平面以X轴为轴的转动角速率为
根据角动量守恒原则。
其中,
是主旋翼与空气的夹角,
是主旋翼产生的生力差。
是主旋翼升力焦点到主轴的距离。
是由希拉小翼旋转平面与主轴的夹角
决定的。
,其大小决定了飞机的灵敏度。
这个比例可以通过改变主旋翼夹头上摇臂与主轴的距离来调节。
于是,问题转化为:
在前面的分析中,
;
现在考虑机身倾转因素,则
这是二阶常系数齐次线性微分方程。
求解,得:
、
是待定系数,由t=0时的状态决定。
+
=0于是,主旋翼即直升飞机的倾转的运动方程是:
这个方程说明,我们在操作飞机时,飞机的运动状态并不是匀速改变的,而是有一个加速-减速的过程。
这也就是所谓hirobo和雷虎飞行时操作感觉不同的原因。
IV、小结。
以上定量分析的内容可能会给大家带来一些困难。
于是我将在这一节中总结一下我从公式中得到的结论。
主旋翼旋转平面运动类型所对应的实际情况运动方程
结论
微扰-稳定过程悬停时受到微风的干扰
悬停时主旋翼转速和平衡杆的转动惯量的乘积反比于飞机的稳定性
微扰过程
轻微的人为操作或强风
轻微操作时,主旋翼转速越高,希拉小翼面积越大,空气密对越大,平衡杆越长,飞机就越灵敏;
平衡杆转动惯量越大,飞机越迟钝
大动作过程
大幅度的人为操作
主旋翼转动惯量越大,飞机越迟钝;
飞机的倾转运动经过加速-减速过程。
说明:
由于大动作操作的运动方程比较复杂,需要用模拟软件对方程进行曲线模拟才能得出具体结论。
以上情况为理想状态下,且未计入机身转动惯量对运动的影响。
 升级会员
升级会员 