第二章任和系统数控车床实训操作.docx
《第二章任和系统数控车床实训操作.docx》由会员分享,可在线阅读,更多相关《第二章任和系统数控车床实训操作.docx(45页珍藏版)》请在冰点文库上搜索。
第二章任和系统数控车床实训操作
第二章任和系统数控车床实训操作
第一节任和系统介绍
一、任和系统功能
数控机床加工中的动作在加工程序中用指令的方式事先予以规定,这类指令有准备功能G、辅助功能M、刀具功能T、主轴转速功能S和进给功能F等。
由于目前数控机床的形式和数控系统的种类较多,同一G指令或同一M指令其含义不完全相同,甚至完全不同。
因此,编程人员在编程前必须对所使用的数控系统功能进行仔细研究,掌握每个指令的确切含义,以免发生错误。
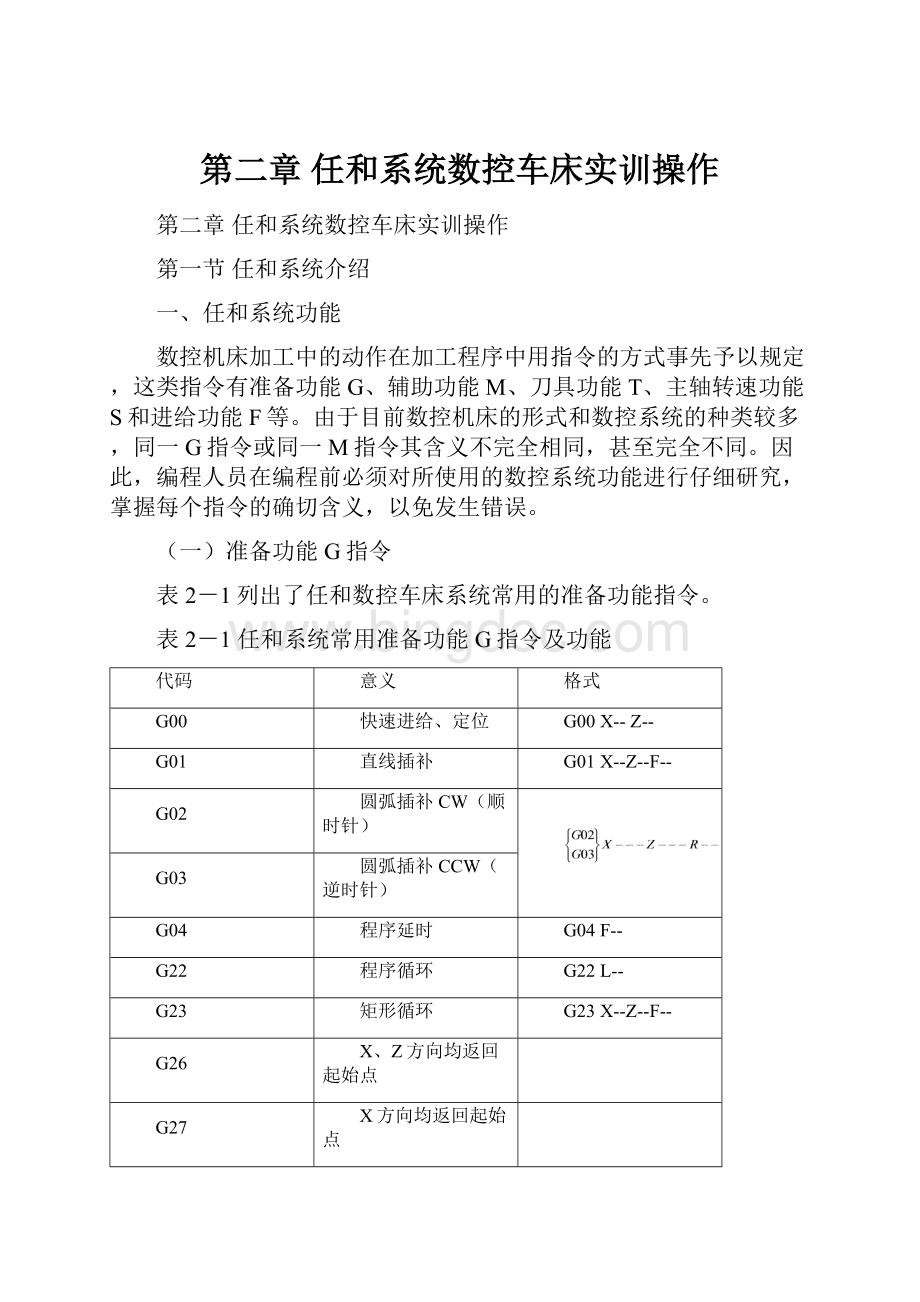
(一)准备功能G指令
表2-1列出了任和数控车床系统常用的准备功能指令。
表2-1任和系统常用准备功能G指令及功能
代码
意义
格式
G00
快速进给、定位
G00X--Z--
G01
直线插补
G01X--Z--F--
G02
圆弧插补CW(顺时针)
G03
圆弧插补CCW(逆时针)
G04
程序延时
G04F--
G22
程序循环
G22L--
G23
矩形循环
G23X--Z--F--
G26
X、Z方向均返回起始点
G27
X方向均返回起始点
G29
Z方向均返回起始点
G32
英制螺纹
G32U--W--F--
G33
公制螺纹
G33U--W--F--
G36
先X向回硬参考点,再Z向回硬参考点
G37
X向回硬参考点
G39
Z向回硬参考点
G82
英制螺纹循环
G32U--W—I—K--F--
G83
公制螺纹循环
G33U--W—I—K--F--
(二)辅助功能M指令
表2-2列出了任和数控车床系统常用的辅助功能指令。
表2-2任和系统常用辅助功能M指令及功能
M指令
功能
M指令
功能
M00
程序暂停
M08
切削液(冷却液)开
M02
程序结束
M09
切削液(冷却液)关
M03
主轴正转M03S500
M20
自动循环
M04
主轴反转
M99
子程序调用
M05
主轴停止
M99
子程序结束,返回主程序
(三)F、T、S功能
1.F功能
指定进给速度。
每转进给(G99):
系统开机状态为G99状态,只有输入G98指令后,G99才被取消。
在含有G99的程序段后面,在遇到F指令时,则认为F所指定的进给速度单位为mm/r。
每分进给(G98):
在含有G98的程序段后面,在遇到F指令时,则认为F所指定的进给速度单位为mm/min。
G98被执行一次后,系统将保持G98状态,直到被G99取消为止。
2.T功能
本系统换刀是采用绝对刀号自动换刀的,即通过编程设定,在加工过程中由系统自动控制换刀,本系统设置四个刀位。
系统换刀是通过检测四个刀位信号与一个公用的刀位正确信号实现的。
如果系统没有检测到正确信号,则系统提示刀架出错,应检查线路接线是否正确。
加工一个零件往往需要几把不同的刀具(刀尖),而每个刀具在转到切削方位时其刀尖所处的位置并不相同,即不同的刀尖应有不同的工件坐标值。
本系统提供了简单方便的刀具功能,在编制程序时无须考虑刀具间的偏差,只要调试时试切对刀一次即可建立各自刀号的工件坐标值。
2.1刀补值的确定
本系统的刀补值是在对刀方式下自动计算完成的。
用户只要按对刀步骤对刀,即可得到相应的刀补值。
2.2刀具补偿方式
在实际编程中,由于工件形状及机床行程不同,本系统设置了刀补功能,以适应不同的加工情况,本系统采用的刀补方式为切换刀尖坐标值。
换刀时,根据刀补值,系统只计算新相应的刀具坐标值,也就是建立刀具的工件坐标系。
因此在增量方式编程时,T指令后面必须安排一条绝对坐标格式的指令。
格式:
Tab
a-刀具号,可设0-4号,0表示不换刀。
b-刀补号,可设1-8组,b为0表示撤消刀补。
一般情况下刀具号a和b是一一对应的,如T22,但在一刀两刃的情况下可能不对应,如T45。
T00撤消当前刀补值。
3.S功能
通过设定S指令可控制主轴转速,S指令有两种输出方式,即数字量输出和模拟量输出,输出方式的选择在参数设定菜单中的主轴输出方式为数字方式,则S指令输出为数字量,若主轴输出方式为模拟方式,则S指令输出为模拟量。
3.1数字量输出S01-S10
功能:
使相应的接口发出信号(位控方式),信号保持至执行下一个S指令时撤除。
(用于控制中间继电器)
格式:
Sxx;(xx为0-10间的整数)。
3.2模拟量输出
功能:
模拟量输出配合变频调速器,对三相异步电机或变频调速电机实现无级变速,对于不同的机床主轴电机,系统可在参数设定方式菜单下,设定主轴最高转速,这样加工程序中需要在最高转速范围内的转速就可直接由Sxxxx指令选择。
本系统的模拟量输出是由8路数字量经D/A转成0-10V的电压量,作为变频器的控制信号。
格式:
Sxxxx(xxxx为1-主轴最高转速,由用户设定)。
例:
S1500表示主轴转速为1500转/分。
二、任和系统程序结构
1.加工程序的组成
数控加工中零件加工程序的组成形式,与采用的数控系统形式不同而略有不同。
现在的数控系统中,其加工程序可分为主程序和子程序。
但不论是主程序还是子程序,每一个程序都是由若干个程序段组成。
程序段是由一个或若干个字(字是由表示地址的字母和数字、符合等组成,它是控制数控机床完成一定功能的具体指令)组成,它表示数控机床为完成某一特定动作而需要的全部指令。
例如:
P9902
N10T11M03;
N20G00X50Z50;
N30G00X42Z0;
N40G01X-0.1F100;
…
N80M05;
上面每一行称为一个程序段,N10、M03、G00……都是一个字。
2.加工程序的格式
每个加工程序都有加工程序号、程序段、程序结束符等几部分组成。
(1)加工程序号格式为:
P××××
××××为加工程序号,可以从0000~9999。
存入数控系统中的各零件加工程序号不能相同。
(2)程序段格式为:
N×…×G××X(U)±×…×Z(W)±×…×F×…×S×…×M××T××××;
程序段号准备功能坐标运动尺寸工艺性指令结束代码
任和系统默认的程序段号从10开始,以10为递增级数。
第二节任和系统车床基本编程指令
一、坐标系统
采用标准坐标系统,即右手笛卡尔坐标系统,如图2-1。
由图可见,刀具运动的正方向,是工件与刀具距离增大的方向。
在使用绝对尺寸编程时,X值(X坐标值)和Z值(Z坐标值)指定了刀具运动终点的坐标值。
在使用增量尺寸编程时,U值(沿X值的增量)和W值(沿Z轴的增量)指定了刀具运动的距离,其正方向分别与X、Z轴正方向相同,在同一程序段内可同时采用绝对尺寸和增量尺寸,但必须依照正确的组合格式。
正确组合:
X、Z;U、W;X、W;U、Z。
不正确组合:
X、U;W、Z。
一般情况下U=X终点-X起点W=Z终点-Z起点
图2-1
二、快速点定位指令G00
本指令可将刀具快速移动到所需位置上,一般作为空行程运动,既可是单坐标运动,又可两坐标同时运动,程序格式如下:
例2-1N0020G00X100Z100
表示将刀具快速移动到X为100、Z为300的位置上,运动轨迹见图2-2。
图2-2
例2-2N0040G00U-36.02
表示刀具从当前位置向X轴负方向快速移动36.02(直径量),实际位移18.01,运动轨迹见图2-3。
图2-3
注:
(1)G00指令中不需要给定速度,G00运行速度应在参数设置方式下设定,设定的范围:
2000mm/min~8000mm/min(Z轴),X轴减半。
G00的具体数值根据机床大小及负载情况调整。
(2)只有一个坐标值时,刀具将沿该方向运动(见图2-3);有两个坐标值时,刀具将先以1:
1步数两坐标联动,然后单坐标运动(见图2-2)。
三、插补功能指令
(一)直线插补指令G01
本指令可将刀具按给定速度沿直线移动到所需位置,一般作为切削加工运动指令,既可单坐标运动,又可两坐标同时插补运动。
程序格式如下:
例2-3N0060G01Z200F100
表示将刀具以刀具每分钟100毫米的速度走到Z200的位置,运动轨迹见图2-4。
图2-4
例2-4N0080G01U20.5W-40F150
表示刀具以每分钟150毫米的速度,从当前位置开始按插补方式走一斜线,终点相对于起点的坐标为(U20.5,W-40),即其沿X轴方向移动20.5(直径量),沿Z轴移动W-40,运动轨迹见图2-5。
图2-5
注:
(1)G01指令中应给出速度F值,速度范围为6~2000mm/min。
(2)只有一个坐标值时,刀具将沿该方向运动,有两个坐标值时,刀具将按所给的终点坐标值做直线插补运动,其轨迹为连结起点到终点的一条斜线,见图2-5。
(二)圆弧插补指令G02/G03
本指令可将刀具按所需圆弧运动,G02为顺圆弧,G03为逆圆弧,顺、逆方向设定见图2-6。
特别注意:
这里的方向设定与人们日常顺、逆时针方向相反。
本指令可自动过象限。
图2-6
编制圆弧程序时,应确定圆弧终点位置与圆心位置。
如需编制图2-7所示圆弧轨迹的程序,应明确圆弧终点位置为(X120、Z10)表示圆心位置,这样图2-7中圆心位置应是(I60、K-40)。
确定了这两点,即可编程。
一般情况下I=X圆心—X起点
K=Z圆心—Z起点
注:
(1)圆弧终点位置及圆心位置中所用的X、U、I值均采用直径量编程。
(2)圆弧终点坐标计算误差应小于5个脉冲当量值。
(3)运行速度为6~600mm/min。
例2-5以绝对尺寸方式编制图2-7所示圆弧程序。
程序如下:
图2-7
N0100G02X120Z10I60K-40F300
顺圆弧圆弧终点坐标值圆心相对圆弧起点位置运动速度
例2-6以增量尺寸方式编制图2-7所示圆弧程序。
程序如下:
N0100G02U60W-90I60K-40F300
例2-7按图2-8所示圆弧轨迹要求,以绝对尺寸方式编制程序。
图2-8
这是一个光滑曲线,它A→B→C两段圆弧连接而成,AB为顺圆弧,BC为逆圆弧。
所以整个圆弧曲线应由两段圆弧程序连接起来完成,AB的圆心位置(I50、K0),BC的圆心位置为(I-30、K-20)。
程序如下:
N0120G02X40Z25I50K0F250
N0130G03X60Z5I-30K-20
例2-8按图2-8所示圆弧轨迹要求,以增量尺寸方式编制程序。
程序如下:
N0120G02U20W-20I50K0F250
N0130G03U20W-20I-30K-20
※本系统允许对G02,G03指令使用圆弧半径编程。
其编程格式为:
G02X(U)------Z(W)------R------F------
G03X(U)------Z(W)------R------F------
其中X(U),Z(W)为圆弧终点。
坐标X,Z为绝对坐标尺寸,U,W为增量尺寸,X和U以直径量编程。
R为圆弧半径。
F为运行速度。
原G02,G03以圆心坐标编程保持不变。
这样,G02,G03既能以圆弧半径编程,又可以圆心坐标编程,用户可灵活应用。
注:
(1)如G02,G03中既有I,K又有R则出错E-15-02
(2)如R<
,则出错E15-30
(3)另外,用圆弧半径编程时,圆弧对应的圆心角不能超过180度,圆弧半径R,及圆弧程序中X坐标或Z坐标的位移量不能超过650mm。
例2-9以圆弧半径编程方式编制图2-8所示圆弧程序。
程序如下:
N0140G02U20W-20R25F250
N0150G03U20W-20R25
四、程序延时指令G04
本指令给定所需延时的时间,当程序执行到本程序段时,系统按所给定的时间延时,不做任何其它动作,延时结束后再执行下一段程序。
例2-10N0140G04F10.05
表示本段程序延时10.05
注:
本指令中F表示时间,单位为秒,范围为0.01—99.99秒。
五、螺纹插补指令G30,G32、G33
本指令用于加工标准公、英制直螺纹、锥螺纹、多头螺纹。
G30用来设定螺纹退尾方式,G32为英制螺纹,G33为公制螺纹。
在本指令中,必须采用增量尺寸方式编程,如G32,G33指令中含有绝对尺寸X、Z,则处错E18-03。
程序中的U为直径量。
1.螺纹退尾方式设定:
本系统螺纹退尾方式有三种:
(1)标准退尾(无G30指令或G30后不带参数):
X向退尾量为2倍的导程再加2mm,如导程为1.5mm的螺纹,退尾量为2×1.5+2=5mm(实际位移2.5mm),Z向退尾量为1.2mm。
指令格式NxxxxG30
如果不用G30指令则系统默认为标准退尾。
(2)无退尾:
螺纹指令结束时没有退尾,用于攻丝。
指令格式NxxxxG30U0W0
(3)螺旋线退尾(老鼠尾):
按G30指令设定的U值与W值退尾。
指令格式NxxxxG30UW
其中01/4螺距。
例2-11N0080G30U10W2
N0090G00U-16
N0100G33W-40F1.5
在螺纹总长度40mm中Z方向走到38mm时,即最后剩下2mm时X方向开始退尾,X方向退尾量为10mm,X方向退尾的同时,Z方向走完剩下的尺寸。
(4)在程序中G30必须设在螺纹加工指令前,并且G30指令具备模态,即G30设定后,其后面的螺纹指令均以设定的方式退尾,直至新的G30出现。
2.螺纹指令格式如下:
G32UWF
G33UWF
F表示螺纹导程,公制螺纹单位为毫米,F范围为:
0.25~12.00mm,英制螺纹用每寸牙数表示,小数点后的数值表示分数牙数的分母值,如每寸11
牙表示为11.2。
F范围为33
~3牙/寸。
编程举例如下:
例2-12NO160G33W50F1.5
表示刀具沿Z轴负方向运行50毫米,加工导程为1.5毫米的右旋公制螺纹(主轴正转)。
例2-13NO180G32W50F11.2
表示沿Z轴正方向运行50毫米,加工每时11
牙的英制左旋螺纹(主轴正转)。
(1)参数U为螺纹终点与起点间的直径差,无U时为直螺纹,U时为锥螺纹。
(2)参数W为罗纹总长,其正负与Z轴一致,要求│W│>│U│,│W│>4mm,否则程序出错E18—04。
由于螺纹加工起步时的螺距是变化的,因此编程时必须使刀尖让开工件足够的距离。
(3)在执行G32,G33前必须安排一道X向进刀指令(G00或G01),用来确定螺纹切削完毕时X向的追尾方向,本系统规定追尾方向与进刀方向相反,如果没有进刀指令,则程序出错E18—05。
例2-14N0150G01U-10F150
N0160G33W-50F2
其中。
第N0150段程序(负方向走刀)指出了第N0160段程序的追尾方向是正方向。
3.螺纹加工需要与主轴转速过高或不稳会因系统响应跟不上而使罗纹破牙,如果主轴刚起动或刚变速而转速不稳,则必须延时足够的时间等主轴平稳后再开始螺纹加工。
本系统推荐主轴转速n应满足下式:
n≤2300/t—60,对于较大的机床或较大的导程,其转速还应适当降低。
其中n—主轴转速(转/分),t—罗纹导程(mm),英制螺纹应将其换算成公制导程。
4.本系统具有检查编码器脉冲数及主轴转速功能,即在手动方式下起动主轴,按F5键就可看到编码器脉冲数及主轴转速。
例2-15按图2-9要求编制加工锥体螺纹程序。
加工锥螺纹,除了将长度用W值表示外,还需将锥罗纹终点处距起点的直径差值以U值表示,其他与直螺纹程序编制相同。
图2-9
若以两刀车完螺纹,程序如下:
N190G30U6W2
N200G00X21
N210G32U2W-32F14
N220G00Z50
N230X20
N240G32U2W-32F14
N250G00X40Z50
六、返回起始点指令G26、G27、G29
本指令是将刀具返回起始点(上次程序启动时刀架的起始点)。
其中G26指令用于X(U)、Z(W)两坐标均返回至起始点,G27指令用于X(U)轴返回起始点,G29用于Z(W)返回起始点。
程序格式如下;
例2-16N0260G26
表示X(U)、Z(W)方向均返回起始点。
例2-17N0300G27
表示X(U)方向返回起始点。
例2-18N0300G29
表示Z(W)方向返回起始点。
注:
(1)采用G26返回起始点时,运动方式与G00方式相同。
(2)返回速度与G00速度一致。
七、程序循环指令G22、G80
本指令用于零件加工中局部需反复加工动作的场合,如需多刀加工某较大的切削量,或多刀加工螺纹等,程序格式如下:
例2-19N0320G22Lxxxx
N0330--------------------
N0390----------------------
N0400G80
注:
(1)程序循环指令从G22指令以下一段程序执行,到G80以上一段程序为止结束一次循环,然后再返回到G22以下一段程序执行。
(2)循环次数以L表示,L后四位数(0~9999)表示循环数。
如果L0000则程序跳过循环内容,向下执行。
L0007表示执行7次循环内容,以此类推。
(3)本指令不可嵌套。
例2-20:
按图2-10所示轨迹要求编制程序。
程序如下:
N0420G22L0003
N0430G00U-20
N0440G01W-40F200
N0450G00U15
N0460W35
N0470G80
图2-10
八、矩形循环指令G23
本指令用于加工相互垂直的两个相邻表面,运动轨迹为一矩形。
在每次进刀量不同时,如在后续段依次给出新的对角点参数,矩形的循环将依次执行。
例2-21运动轨迹如图2-11所示,程序格式如下:
N0480
图2-11
N0490X26Z48
注:
(1)本指令可采用绝对尺寸(X、Z)或增量尺寸(U、W)编程。
(2)执行本指令时,矩形的第a、e、d、h四条边运行速度为G00设定的速度,第b、c、f、g四条边按指令所给定F速度运行。
(3)无论对角点位置处于起点何方,本系统均先运行X(U)方向。
(4)X(U)、Z(W)所设定的矩形不能有某边长为零的情况出现。
九、返回硬参考点指令G37、G39、G36
本指令是将刀尖返回硬参考点。
(只能在装有硬参考点的机床上使用)
其中G37—X向回硬参考点;
G39—Z向回硬参考点;
G36—先X向回硬参考点,再Z向回硬参考点;
当程序执行到G36、G37、G39时,工作台便以高速靠向机械原点行程开关,当工作台压下行程开关后,便以F300mm/min的速度低速运行,直至行程开关释放,再以同样的低速反向靠向行程开关直至行程开关再压下时,工作台停止运用。
在指令中必须给出对参考点的运动方向,如参考点位于当前刀尖的负方向,则坐标值为负值(取消刀补状态下),参考点位于当前刀尖的正方向时,则坐标值为正值(取消刀补状态下),坐标值的大小可以随意设定,但不能为零。
十、G82、G83螺纹循环指令
本指令用于循环加工公制、英制螺纹,多头螺纹,G82为英制螺纹,G83为公制螺纹循环,本指令中的坐标采用增量方式编程。
格式:
G82(G83)UWIKF
U、W为切削螺纹时的加工长度,可为直螺纹或锥螺纹,I、K为切削螺纹前的进刀量,如果进刀量为零,可以不输入I、K,参数F为螺纹导程。
G82、G83指令具备摸态,其中U、W、F也应具备模态,即在其后继螺纹循环中不需输入G82(G83)、U、W、F等指令,只需输入I、K即可。
参见图8.15(a),每个循环的运动轨迹为从起点A开始
(1)按I、K量进刀至B点。
(2)按U、W值进刀螺纹切削。
(3)退尾。
(4)Z向退刀。
(5)X向走刀返回B点(也应下一循环的起点)。
图2-12
例2-22:
加工如图2-12(b)所示螺纹,分三刀车完。
N0050G30U10W3;设定螺纹退尾方式。
N0060G00X20;螺纹切削前安排一道X向走步命令。
N0070G82U4W-20F11.2;第一刀螺纹循环。
N0080I0.5K—0.1;进刀,车第二刀螺纹循环。
N0090I0.5K0.2;进刀,车第三刀螺纹循环。
说明:
(1)G82、G83加工参数和G32、G33相同;
(2)I为X方向偏移量(增量尺寸)I≥0
(3)K为Z方向偏移量,可为正数,K为增量尺寸,当指令中无K参数时,默认K=0
(4)指令开始执行时,走完I,K,再走螺纹加工,然后返回到螺纹的起始点。
(5)含U参数为锥螺纹,不含U为直螺纹。
(6)G82,G83指令循环体内具有模态,即除I、K参数外,其余参数具有模态。
(7)在G82,G83指令前,必须安排一道X走步指令(G00或G01)以确定螺纹加工的退尾方向,即退尾方向和进刀相反,否则出错。
(8)在G82,G83前也必须用G30指令设定退尾方式。
第三节任和系统车床操作面板
图2-13任和系统车床操作面板
任和数控系统采用LCD显示器,用LCD显示器显示加工程序编制过程;各种参数设定过程;自动和手动状态下工作台坐标的动态计数值以及主轴,刀位,冷却泵状态等辅助信息。
系统面板如图2-l3面板上共有4个方式转换键,1个复位键,5个软功能键,36个编辑键,一个电源开关,一个急停开关,一个功放开关,一个启动键,一个暂停键,8个手动操作键,四个点动方向键。
各键和开关的功能和使用(见表2-3)
表2-3各键和开关的功能和使用
键名称
功能和使用
编辑
程序管理键
按此键进入程序管理方式,实现加工程序的输入、修改、拷贝、删除等操作。
参数
参数修改键
按此键进入参数设定方式,对快速速度、主轴最高转速、间隙补偿、换刀反转时间 2主轴输出方式、刀补等参数进行设定操作。
自动
自动运行键
按此键进入自动运行方式,用于实际加工零件,可实现程序单段运行或连续运行。
并可切换到另一程序或选择某一程序段运行。
手动键
手动
按此键进入手动运行方式,可进行手动进给、刀具回零、刀具坐标清零设参考点及对刀操作。
在手动方式下,可对主轴、冷却泵、刀架进行操作,还可用手摇脉冲发生器代替四个点动方向键进行操作。
复位
复位键
结束当前状态,重新启动系统,回到主菜单。
一般用于退出急停和用于误操作后出现的死机现象,以及推出检测状态。
软功能键
F1、F2、F3、F4、F5五个软功能键在各级菜单中功能不一样,使用时参阅菜单提示做相应的操作。
字母键
P、G、S、T、M、F、R、X、Z、N、U、W、L、I、K
数字符号键
1、2、3、4、5、6、7、8、9、0
DEL
删除键
在程序编辑时,当光标停在某一数字或字母上,按DEL键可删除该数字和字母,还可用于删除程序段和加工程序。
INS
插入键
LF
回车键
在编辑程序时,写完一个程序段,按回车确认换行,在“参数设定”方式下,不选参数时按LF键跳
 升级会员
升级会员 