点的合成运动习题解答.docx
《点的合成运动习题解答.docx》由会员分享,可在线阅读,更多相关《点的合成运动习题解答.docx(17页珍藏版)》请在冰点文库上搜索。
点的合成运动习题解答
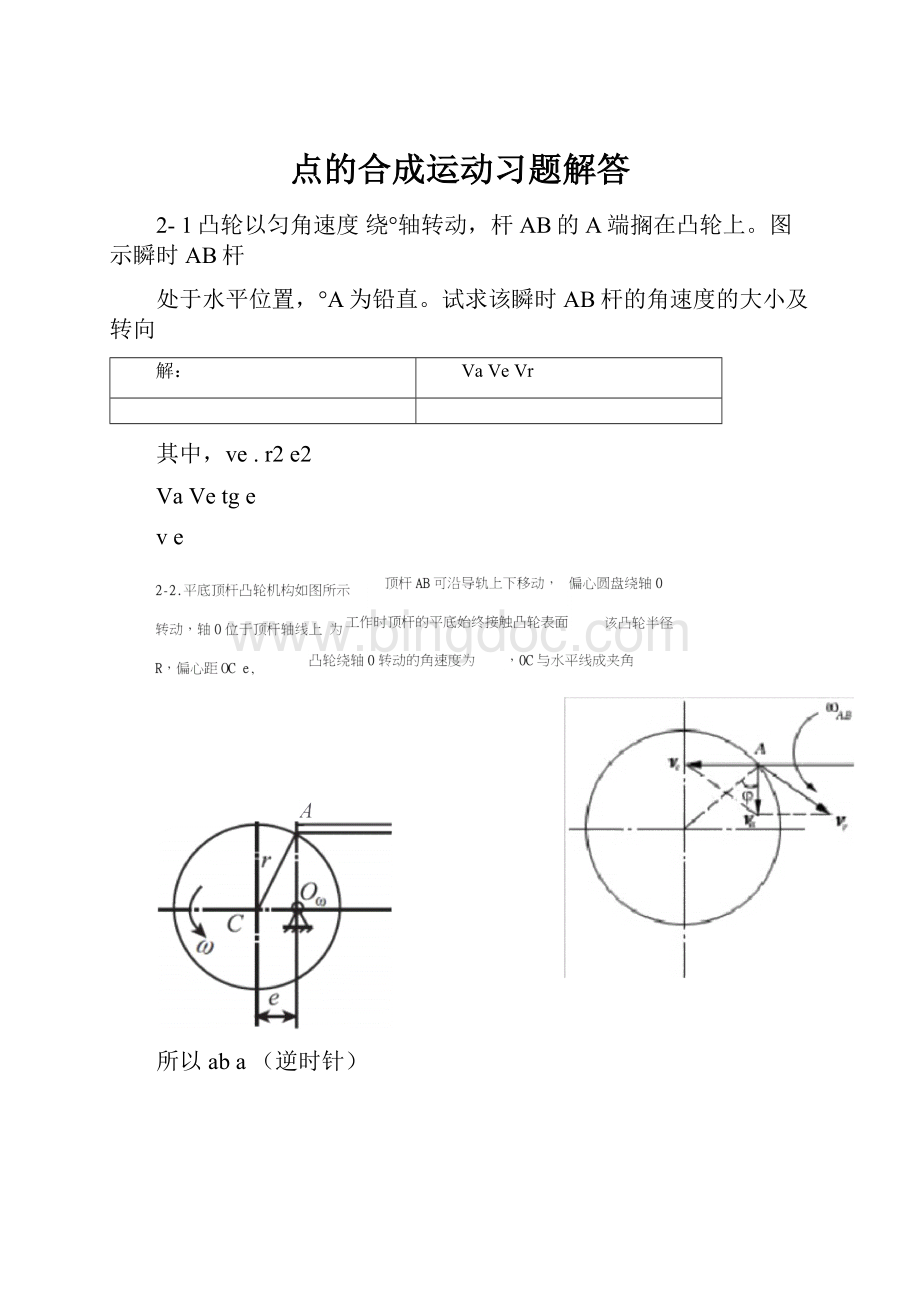
2-1凸轮以匀角速度绕°轴转动,杆AB的A端搁在凸轮上。
图示瞬时AB杆
处于水平位置,°A为铅直。
试求该瞬时AB杆的角速度的大小及转向
解:
VaVeVr
其中,ve.r2e2
VaVetge
ve
所以aba(逆时针)
求当0时,顶杆的速度
(1)运动分析轮心C为动点,动系固结于AB;牵连运动为上下直线平移,相对运动为与平底平行直线,绝对运动为绕0圆周运动。
(2)速度分析,如图b所示
V-V-V
aer
方向丄OC1-
大小?
?
y肋二人二vacos2—3.曲柄CE在图示瞬时以goo绕轴E转动,并带动直角曲杆ABD在图示平面
内运动。
若d为已知,试求曲杆ABD的角速度
解:
1、运动分析:
动点:
A,动系:
曲杆OiBC,牵连运动:
定轴转动,相对运动:
直线,绝对运动:
圆周运动。
2、速度分析:
VaVeVr
Vai21o;VaVe'、2lo
D点与套在AE杆上的套筒铰接。
0A以匀角速度°2rad/s转动,
02Dl3、3cm。
试求:
当30时,的角速度和角加速度。
所以aa
解:
取套筒D为动点,动系固连于AE上,牵连运动为平动
(1)由VaVeVr①
得D点速度合成如图(a)
得VaVetg,而Ve
1/-
因为Va—3or,所以
3
Va
-0.67rad/s
方向如图(a)所示
(2)由aaa:
ae②
得D点加速度分析如图(b)将②式向DY轴投影得
n・・
aacosaasinsin
而aaO2Dlae0r
lsinrsin
n
aaSinaesin
cos
O2D
aa
n
aasinaesin
lcos
2.05rad/s2,方向与图(b)所示相反。
2-5•图示铰接平行四边形机构中,O1AO2B100mm,又O1O2AB,杆0小以等角速度2rads绕O1轴转动。
杆AB上有一套筒C,此筒与杆CD相铰接。
机构的各部件都在同一铅直面内。
求当60时,杆CD的速度和加速度。
解杆CD」.点Q为功心,JtUB:
牵it运动为曲线平移•相对运动沿良i直线,绝对运动为上卜直线。
速度与加速度分析分别如图b、图c所示,图中
VJ=VB-Vt*VCD=aA=aB=at*nCD=山
于是再
、—=i\=vtcosaCD=a3=$in卩-OAco~siii^=6346m/f
方向如图。
2-6图示圆盘绕AB轴转动,其角速度2trad/s。
点M沿圆盘半径ON离开中
心向外缘运动,其运动规律为OM40t2mm。
半径ON与AB轴间成60倾角。
求当t1s时点M的绝对加速度的大小。
解点M为动点,动系Oxyz固结于圆盘;牵连运动为定轴转动,相对运动为沿径向直线运动,绝对运动为空间曲线。
其中轴x垂直圆盘指向外,加速度分析如图所示,当t=1s时
lads*a-——-2rad/s2,OM-40r2二40mmdf
v=一OM-80f=80mm/sf
rdr
=OMsin60°co2=80^3nuns2,□:
=OMsin60°・a=40^3111111/s2ar=■一-=80mm/s?
1dz
;7C=2s*叫・sm60°=160\/3nuns2
aM二屁+代+疋=7(^rcos600)2+(tjfsin6O°-£7:
)2+(tj;+ac)2
代入数据得
aM-0.356m/s3
2-7.图示直角曲杆OBC绕O轴转动,使套在其上的小环P沿固定直杆OA滑动。
已知:
OB0.1m,曲杆的角速度0.5rads,角加速度为零。
求当60时,小环P的速度和加速度。
解:
1、运动分析(图5-4):
动点:
小环M;动系:
固连于OBC;绝对运动:
沿OA杆的直线运动;相对运动:
沿BC杆的直线运动;牵连运动:
绕O点的定轴转动。
2、速度分析:
VaVeVr(a)
其中Va、Ve、Vr方向如图所示。
Ve=OP=0.2X0.5=0.1m/s;
于是(a)式中只有Va、Vr二者大小未知。
从而由速度平行四边形解得小环M的速
度
Va=.3ve=0.173m/s
此外,还可求得
Vr=2Ve=0.2m/s。
2.加速度分析(图5-10)。
各加速度分析结果列表如下
绝对加速度
aa
牵连加速度
aen
相对加速度
ar
科氏加速度
ac
大小
未知
0.22
未知
2Vr
方向
沿OA
指向O点
沿BC
垂直BC
写出加速度合成定理的矢量方程
aa=aen+ar+aC
应用投影方法,将上式加速度合成定理的矢量方程沿垂直BC方向投影,有
3aCOSdenCOS3c
aaaen2aC
由此解得
2
aMaa0.35m/s
方向如图所示。
2—8半径为R的圆轮,以匀角速度3。
绕O轴沿逆时针转动,并带动AB杆绕A轴转动。
在图示瞬时,OC与铅直线的夹角为60,AB杆水平,圆轮与AB杆的接触点D距A为•.3R。
求此时AB杆的角加速度。
解:
1.运动分析:
动点:
C,动系:
杆AB,绝对运动:
圆周运动,相对运动:
直线,牵连运动:
定轴转动。
2.速度分析(图a)
VaVeVr
VaR0Ve
Ve0
AB2R"2"
vr0
3.加速度分析(图b)
nt
a&a「aeae
沿铅垂方向投影:
aacos60
a;cos30a;sin30
a;
n12
tan30@ae)(0R
%■3
—R)
AB
t
电
CA
2-10曲柄O1M1以匀角速度运动,M2为该构件上固连的销钉。
当机构运动到如图所示位置时,
w=3rad/s绕O1轴沿逆时针转动。
T形构件作水平往复槽杆O2E绕O2轴摆动。
已知O1M=r=20cm,l=30cm。
0=(j=30,求此时
02E杆的角加速度。
C
Mi
Aj-
02
l
M—
Ve2
~■■■■'-■B
E
(a)
习题5-16图
M1
an
运动分析:
动点:
z7777x
02
©
TT'TB
(b)
tj
ae2
nl
e2
M
•…•-aa2
ac:
解:
1.
牵连运动:
平移。
速度分析(图a):
Va1
Va1r160cm/s;Ve1
加速度分析(图b):
Mi,动系:
Ve1Vr1
Vaisin
aa1ar1
30cm/s
沿铅垂方向投影:
aaicos
AB,绝对运动:
圆周运动,
相对运动:
直线,
2.运动分析:
动点:
动:
定轴转动。
速度分析(图a):
Va2Vei30cm/s;
M2,动系:
Va2
Ve2
va2sin15cm/s;
加速度分析(图b):
ae1
3
2
杆
—2
903cm/s
O2E,绝对运动:
直线,相对运动:
直线,牵连运
Ve2Vr2
Va2cos153cm/s;
Ve2
O2EjCOS
n
aa2a「2ae2
0.75「ad/s
t
ae2ac2
沿aC方向投影:
aa2cos
a;2aC;a;2aeicos30aC21352150.75157.5cm/s
O2E
t
ae2
cos
l
157.5.3
~60~
2
4.55「ad/s
2-11牛头歯床机构如图所小Lili=200mm.角速度=2rad/s,
求图示位誉滑祝CD的速度和加逑度*
解〔1)先収0]/上点卫为动点,动系固结TOZB-绝对运动为绕OxW?
i运动”相対运动为沿运动为绕Qj定轴转动•速度“加速度分析如圈也图c所示。
'&O.B的角速度力血,角加速度'ha.山图知
0{.1=0.4m・vA-®・OXA=04m/s
vr=cns30°=0一20寸3iils・vVdL=v4sm30°=0.20nVs
又vAi~所以
所以
e-——=0.5rads
O.A
由M递度分析圈c.e
(1)
分别向轴小y投戲得
—£i4=一“;cqs60°—cj'^cos30°-£/n一。
応cos30°
0=—sinGt)0+u'Jesiii303+£/卄sin60°+aiesin30°把aA=/y"0}A=0.8m/s2*=€t>~*O:
A=0」0nVS"?
afc=aO:
A=0.40ains:
T理”=2/iALHr=020\3ms2
代入式⑴,消去乞掘*Mfi
a-—rad/'s-(逆)
(2)再取摇trO2B±的点B为动為功和购门汨枕CD;绝的运动対绕Q冏周运动.相时运动为上下血线运动.牵述运功为水平『[线平移.速度、加速度分析如图臥
I3TWB
八»0.65心*65&『
v„=C?
nno=--x0.5=-ms
£-cos30°3
vcp=廿蘇=珠cus30°=0.325iil'js(—)
彳3盘E+H呂=口班+凸Jir
向轴耳投影御
—£?
gcos3()6-i?
^cos6(r=-aSc
把
—、c(=0.65m:
s~.—口;:
二O2B_=0.1S76ill's-
代入A(3).解得*亠
aCD=flfle=0.65^ni/s^d
2—12.绕轴O转动的圆盘及直杆OA上均有一导槽,两导槽间有一活动销子M如图所示,b0.1m。
设在图示位置时,圆盘及直杆的角速度分别为i9rads和
23rads。
角加速度均为零。
求此瞬时销子M的速度和加速度。
解
(1)运动分析①活动销子M为动点,动系固结于轮0;牵连运动为绕0定轴转动,相对运动为沿轮上导槽直线,绝对运动为平面曲线。
叫二Vel+Vrl
②活动销子M为动点,动系固结于杆0A;牵连运动为绕0定轴转动,相对运动为沿0A直线,绝对运动为平面曲线。
儿二儿2+儿2
速度分析如图b所示,由式
(1)、
(2)得
5+叭I=S+r
方向丄QMJ丄V
大小说?
?
向叫<方向投影,得
5一叫1cos30°=x^
11cos30°31
向陀方向投影,得
=0.346ms
I
所以叫—Jr;十叫;-0-529ms
aa
n
ae1ar1
Iac1
an
ae2
ar2
ac2
a:
9.35
m/s2
ac1
14.4
m/s2
a:
2
1.04
m/s2
ac2
2.4
m/s2
ar1
5.54
m/s2,
ar2
—6.
93m/s2
ax
—a:
cos30°
ac1
6.3
m/s2
ay
ar1ae1
sin30°
0.8
165
cm/s2
a(
2
axay
2)1/2
)
6.36
cm丿
/s2
7.8°
 升级会员
升级会员 