Matlab中基于dq变换的锁相环仿真研究.pdf
《Matlab中基于dq变换的锁相环仿真研究.pdf》由会员分享,可在线阅读,更多相关《Matlab中基于dq变换的锁相环仿真研究.pdf(8页珍藏版)》请在冰点文库上搜索。
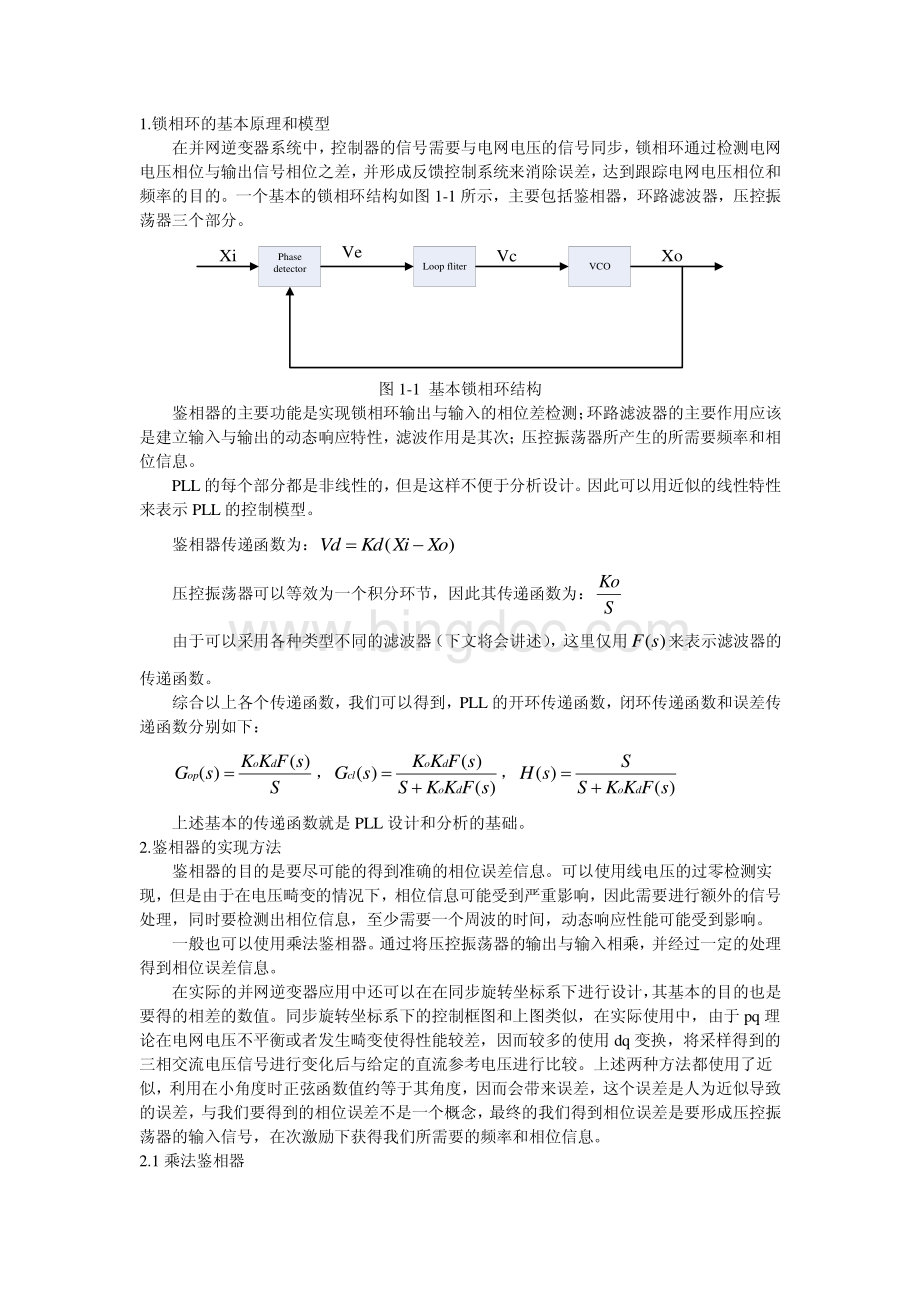
1.锁相环的基本原理和模型在并网逆变器系统中,控制器的信号需要与电网电压的信号同步,锁相环通过检测电网电压相位与输出信号相位之差,并形成反馈控制系统来消除误差,达到跟踪电网电压相位和频率的目的。
一个基本的锁相环结构如图1-1所示,主要包括鉴相器,环路滤波器,压控振荡器三个部分。
LoopfliterVCOPhasedetectorXiVeVcXo图1-1基本锁相环结构鉴相器的主要功能是实现锁相环输出与输入的相位差检测;环路滤波器的主要作用应该是建立输入与输出的动态响应特性,滤波作用是其次;压控振荡器所产生的所需要频率和相位信息。
PLL的每个部分都是非线性的,但是这样不便于分析设计。
因此可以用近似的线性特性来表示PLL的控制模型。
鉴相器传递函数为:
)(XoXiKdVd压控振荡器可以等效为一个积分环节,因此其传递函数为:
SKo由于可以采用各种类型不同的滤波器(下文将会讲述),这里仅用)(sF来表示滤波器的传递函数。
综合以上各个传递函数,我们可以得到,PLL的开环传递函数,闭环传递函数和误差传递函数分别如下:
SsFKKsGdoop)()(,)()()(sFKKSsFKKsGdodocl,)()(sFKKSSsHdo上述基本的传递函数就是PLL设计和分析的基础。
2.鉴相器的实现方法鉴相器的目的是要尽可能的得到准确的相位误差信息。
可以使用线电压的过零检测实现,但是由于在电压畸变的情况下,相位信息可能受到严重影响,因此需要进行额外的信号处理,同时要检测出相位信息,至少需要一个周波的时间,动态响应性能可能受到影响。
一般也可以使用乘法鉴相器。
通过将压控振荡器的输出与输入相乘,并经过一定的处理得到相位误差信息。
在实际的并网逆变器应用中还可以在在同步旋转坐标系下进行设计,其基本的目的也是要得的相差的数值。
同步旋转坐标系下的控制框图和上图类似,在实际使用中,由于pq理论在电网电压不平衡或者发生畸变使得性能较差,因而较多的使用dq变换,将采样得到的三相交流电压信号进行变化后与给定的直流参考电压进行比较。
上述两种方法都使用了近似,利用在小角度时正弦函数值约等于其角度,因而会带来误差,这个误差是人为近似导致的误差,与我们要得到的相位误差不是一个概念,最终的我们得到相位误差是要形成压控振荡器的输入信号,在次激励下获得我们所需要的频率和相位信息。
2.1乘法鉴相器乘法鉴相器是一种较为普遍的传统检相方法,其原理是基于以下数学表达式:
)()(21)(*)(BASinBASinBSinASin一般的可以假设PLL的输入信号)(ttwSinXiii,输出信号为)(ttwSinXooo。
那么根据上述等式可以得到:
)()()(21)()(21)()(totitwwSintotitwtwSinttwSinttwSinoioiooii这个式子包括两个部分,左边部分是一个近似两倍基频的波分分量,由于经过负反馈调节后,频率相差不大,因此右边部分可以近似认为是一个低频或者直流分量,即可以近似认为PLL输入与输出相乘以后得到的结果是:
)()(21totiSin,更进一步的,对于较小的相角差值,我们可以近似认为:
)()()(21)()(21ttotitotiSin,从而得到相角差。
那么要想只得到右边的直流分量,可以做个很简单的处理,将两倍基频分量用低通滤波器滤除即可。
其控制框图如图2所示:
LowpassfilterVCOXXi*XoK(t)Xo图2乘法鉴相器2.2同步旋转坐标系下相位检测同步旋转坐标变化下三相PLL系统的控制框图如图3所示。
LoopfilterK1/SDqTransformationUdrefUdWffWW*Uq*+-+UsaUscUsb图3三相PLL系统基本框图abc坐标系下的系统三相电压采样值经过dq变换后转化为同步旋转坐标下的直流电压分量dU和qU,相角*可以经过w积分得到,环路滤波器的作用是来获得所需要的w。
设系统三相电压采样值为:
)32cos()32cos(cosUUUUUUscsbsa变换矩阵为:
cossinsincos232302121132C因此有)cos()sin(UUUUUCUUscsbsaqd,要使得系统电压相角与PLL输出相角相等,即相角误差为零,实现完全跟踪,那么就有dU为零,如果将参考电压drefU设置为零,则可以锁定电压相角。
同样的,在相角误差很小的情况下,我们有近似关系)sin(,所以可得简化的模型,其控制框图如图4:
LoopfilterK1/SUdrefUdWffWW*+-+USin-图4三相PLL系统简化控制框图按照上面的分析,上图中的正弦环节可以省略。
3.滤波器的选择滤波器是锁相环的核心部分,其性能直接决定了环路滤波器的性能。
不同的环路滤波器,控制模型有不同的传递函数,具体来说就是传递函数的阶数与类型的不同,从而导致设计方法上的差异与跟踪性能不同,重点设计部分应该是环路滤波器种类的选取和参数的设计。
滤波器有很多,但是我们要注意,应该保证最终的系统闭环传递函数的阶数在三阶以下,最常用的是二阶,即使是高阶也经常近似简化为二阶来进行设计,三阶以上的系统因为设计困难而很少使用。
当我们确定了环路滤波器的类型和参数后,并用BODE图分析其频率响应,验证其控制性能,例如普遍使用的表征控制器性能的参数:
带宽,截止频率,阻尼系数等等,可以参考各种控制参数调节方法反复进行参数的调试以获得最佳的性能。
滤波器设计应该是响应时间与跟踪精度的折中,对于高精度场合,可以让响应时间稍微长一些以获得较高的跟踪精度。
对于需要实时控制的场合,可以增大其带宽来获得较快的响应时间。
在不同的阻尼比,带宽,自然频率值下,超调量,响应时间,跟踪误差都各不相同,对于参数的选取很重要。
一般来说平衡无畸变的三相系统中,参数相对好设计一些。
在各种非理想和故障状态下的参数调节则依据具体情况,和所希望获得的性能而决定。
3.不同类型的滤波器及PLL闭环频率响应分析3.1理想二阶环节(相当于一个PI环节)理想二阶环节的传递函数可表示为:
SKKssip121,PI控制器相当于增加了一个位于原点的开环极点,同时也增加了一个位于S左半平面的开环零点。
极点提高系统型别,减小了稳态误差。
增加的开环零点减小系统阻尼,缓和PI控制器对系统稳定性及动态过程产生的不利影响。
其频率响应如图6所示图6理想二阶环节频率响应由此可以写出PLL系统的开环和闭环传递函数分别是:
)()(SKKSUsGipopipipopopclUKSUKSUKSUKsGsGsG2)
(1)()(将上述闭环传递函数写成二阶传递函数的标准形式:
22222nnnnwSwSwSw,其中inUKw,ipKUK2。
设VU3112220。
对于典型的二阶系统,要取得较优的性能,可以取=0.707。
有文献用nw来衡量控制系统的带宽,对于二阶系统,这个是可取的。
现在取不同的nw(取nw分别为100,200,300,400,500),观察二阶系统的频率响应特性,如图5。
图7不同自然频率情况下系统频率响应特性曲线具有高频衰减特性,即低通特性。
在不同的自然频率下,幅值裕量为无穷大,相角裕量都为127,但是具有不同的谐振峰值和谐振频率,不同的穿越频率,同时在穿越频率处(幅值裕度为零的频率点),相位滞后都小于180,系统是稳定的。
3.2无源比例积分滤波器无源比例积分滤波器的传递函数可表示为:
SS1211(21)。
这实际上是一个超前滞后滤波器,将传递函数变形可以得到)1111(111121212SSS,与前述的PI环节相比,在11较小的情况下,我们可以近似认为它是一个不完美的积分器,实际的完美积分器不容易实现,在很多情况下,可以用上面的低通滤波器来代替。
其频率响应如图8所示图8无源比例积分滤波器频率响应PLL系统的开环和闭环传递函数如下:
)1111()(11212SSUsGop11221121)
(1)()(USUSUSUsGsGsGopopcl3.3RC积分滤波器RC积分滤波器的传递函数为S11,它就是一个低通滤波器。
给原系统增加了一个负实零点。
其频率响应如图7所示图7RC积分滤波器的频率响应PLL系统的开环和闭环传递函数分别为:
SSUsGop11)(USSUsGsGsGopopcl2)
(1)()(实际使用的上述滤波器都是一阶滤波器,因此最终的都的PLL系统闭环传递函数都是二阶系统。
但是也有高阶情况的,有文献中使用了二阶butterworth滤波器,其传递函数为:
20220)(nwSwSwsH那么最终得到的PLL系统将会是三阶系统。
由于上述系统都是二阶的,因此都可以用类似的方法的进行设计,根据实际情况所需要的性能来合理的选择参数。
以PI环节为例,在matlab中搭建仿真电路,仿真条件设置为:
三相平衡电压源,频率为50HZ,相电压参数为500V,在=0.707,nw=100的情况下,可以得到PI参数分别为:
Kp=14,Ki=69306。
仿真电路如图8:
图8三相平衡条件下PLL仿真图输出波形如图9:
00.010.020.030.040.050.06-1-0.500.51图9(a)PLL输出(wtcos)图9(b)PLL输出(wt)00.0020.0040.0060.0080.010.0120.0140.0160.0180.02-300-200-1000100200300图9(c)q轴电压波形由上图可以看出,在三相平衡情况下,PLL输出能很好的跟踪电网电压频率和相位,并且波形没有畸变,大概半个周波的时间就能实现准确跟踪。
 升级会员
升级会员 