农大自动控制原理在线作业.docx
《农大自动控制原理在线作业.docx》由会员分享,可在线阅读,更多相关《农大自动控制原理在线作业.docx(12页珍藏版)》请在冰点文库上搜索。
农大自动控制原理在线作业
一、单选题
1.
(5分)
某系统闭环传递函数为
,其中对应的留数最小的闭环极点是()。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
3.4高阶系统的动态响应
展开解析
答案B
解析
2.
(5分)
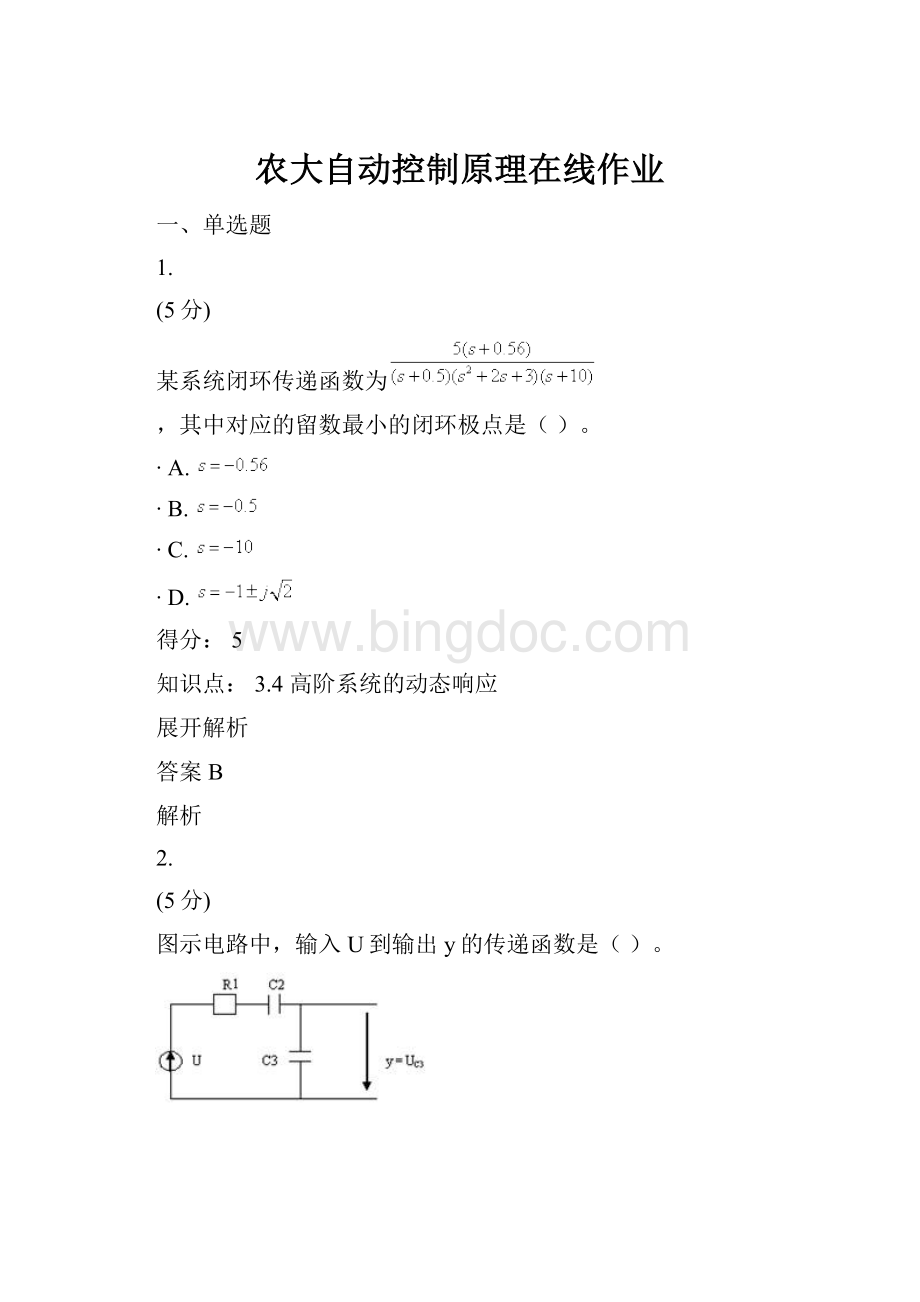
图示电路中,输入U到输出y的传递函数是()。
∙A.
∙B.
∙C.
∙D.
得分:
0
知识点:
2.1控制系统的微分方程
展开解析
答案A
解析
3.
(5分)
系统方框图如图所示,
其传递函数为()。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
2.3传递函数动态结构图(方框图)
展开解析
答案D
解析
4.
(5分)
基于根轨迹的超前校正和基于伯德图的超前校正,其目的都是()。
∙A.改善系统的暂态性能
∙B.将开环控制改为闭环控制
∙C.改善系统的稳态性能
∙D.用低阶系统近似代替高阶系统
得分:
5
知识点:
6.3校正方法
展开解析
答案A
解析
5.
(5分)
比例积分串联校正装置的主要作用是改善系统的()。
∙A. 稳定性
∙B. 稳定性和稳态性
∙C. 稳定性和快速性
∙D.稳态性能
得分:
5
知识点:
6.1输出反馈系统的常用校正方式
展开解析
答案D
解析
6.
(5分)
当ω从−∞→+∞变化时惯性环节的极坐标图为一个()。
∙A.位于第一象限的半圆
∙B.整圆
∙C.不规则曲线
∙D.位于第四象限的半圆
得分:
5
知识点:
5.2频率特性G(jω)的极坐标图(Nyuist图)
展开解析
答案B
解析
7.
(5分)
在传递函数结构图(亦称方框图)中,反馈支路和并联支路的差异是()。
∙A.一个是写加号的一个是写减号的
∙B.一个是串联的一个是并联的
∙C.方框里写的东西不一样
∙D.一个是信号往回送的一个是信号向前走的
得分:
5
知识点:
2.3传递函数动态结构图(方框图)
展开解析
答案D
解析
8.
(5分)
给开环传递函数
根轨迹图增加极点的作用是()。
∙A.根轨迹向右半s平面推移稳定性变差
∙B.根轨迹向左半s平面推移稳定性变差
∙C.根轨迹向左半s平面推移稳定性变好
∙D.根轨迹向右半s平面推移稳定性变好
得分:
5
知识点:
4.3用根轨迹法分析系统性能
展开解析
答案A
解析
9.
(5分)
系统的暂态响应的基本特征取决于系统()在s复平面上的位置
∙A.开环极点和开环零点
∙B.闭环极点和闭环零点
∙C.闭环极点和开环零点
∙D.开环极点和闭环极点
得分:
5
知识点:
3.2一阶系统分析
展开解析
答案B
解析
10.
(5分)
可能具有复数分离点的系统是()。
∙A.四阶及以上系统
∙B.二阶系统
∙C.三阶系统
∙D.一阶系统
得分:
5
知识点:
4.2根轨迹的绘制规则
展开解析
答案A
解析
11.
(5分)
已知开环传递函数
,K>0,K()时系统为欠阻尼。
∙A. K>6
∙B. 5.8∙C. 6∙D. K>5.8或K<0.2
得分:
5
知识点:
4.3用根轨迹法分析系统性能
展开解析
答案A
解析
12.
(5分)
开环传递函数
的零点向右移动,相当于某些惯性或振荡环节的时间常数(),使系统稳定性()
∙A. 增大变好
∙B. 增大变坏
∙C. 减小变坏
∙D.减小变好
得分:
5
知识点:
4.3用根轨迹法分析系统性能
展开解析
答案D
解析
13.
(5分)
系统方框图如图所示,
其开环传递函数为()。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
2.3传递函数动态结构图(方框图)
展开解析
答案B
解析
14.
(5分)
下列各个量中,反映系统稳定性的量是()。
∙A.谐振峰值
∙B.相位裕量
∙C.谐振频率
∙D.剪切频率
得分:
5
知识点:
5.4利用频率特性分析系统的稳定性
展开解析
答案B
解析
15.
(5分)
串联超前校正可用于()的情况。
∙A.当期望闭环主导极点位于未校正系统根轨迹的左边时
∙B.对数幅频特性低频段位置过低时
∙C.当相位裕量满足系统要求时
∙D.当系统根轨迹通过期望主导极点,但在期望主导极点不能满足静态品质指标时
得分:
5
知识点:
6.3校正方法
展开解析
答案A
解析
16.
(5分)
下列说法正确的是()。
∙A.频率特性是指系统在正弦输入信号作用下系统输出与输入之比
∙B.系统的频率特性包括幅频特性和相频特性它们都与频率ω无关
∙C.频率特性反映系统或环节对不同频率正弦输入信号的放大倍数和相移
得分:
5
知识点:
5.1频率特性
展开解析
答案C
解析
17.
(5分)
对于线性定常系统,在()条件下系统输出量的拉氏变换与引起该输出的输入量拉氏变换之比,称为系统的传递函数。
∙A.零初始状态
∙B.零输入
∙C.零时刻
∙D.零响应
得分:
5
知识点:
2.2线性动态系统的输入输出描述
展开解析
答案A
解析
18.
(5分)
系统方框图如图所示,其输入端R到误差E的传递函数为()。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
2.4反馈控制系统的传递函数
展开解析
答案A
解析
19.
(5分)
某系统可用如下方程组描述:
2dx/dt+x–df/dt–f=0
3dz/dt+z–x=0
4dy/dt+y–2dz/dt–z=0
其中f为输入量,y为输出量,则总传递函数为()。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
2.2线性动态系统的输入输出描述
展开解析
答案D
解析
20.
(5分)
某单位负反馈系统的开环传递函数为
,已知其相位裕量为-15°,现要求相位裕量大于40°,则可采用串联校正环节()。
∙A.基于Bode图的超前校正
∙B.基于Bode图的滞后校正;
∙C.基于根轨迹的滞后校正
∙D.基于根轨迹的超前校正;
得分:
5
知识点:
6.3校正方法
展开解析
 升级会员
升级会员 